ROS-based Robot
Jackal
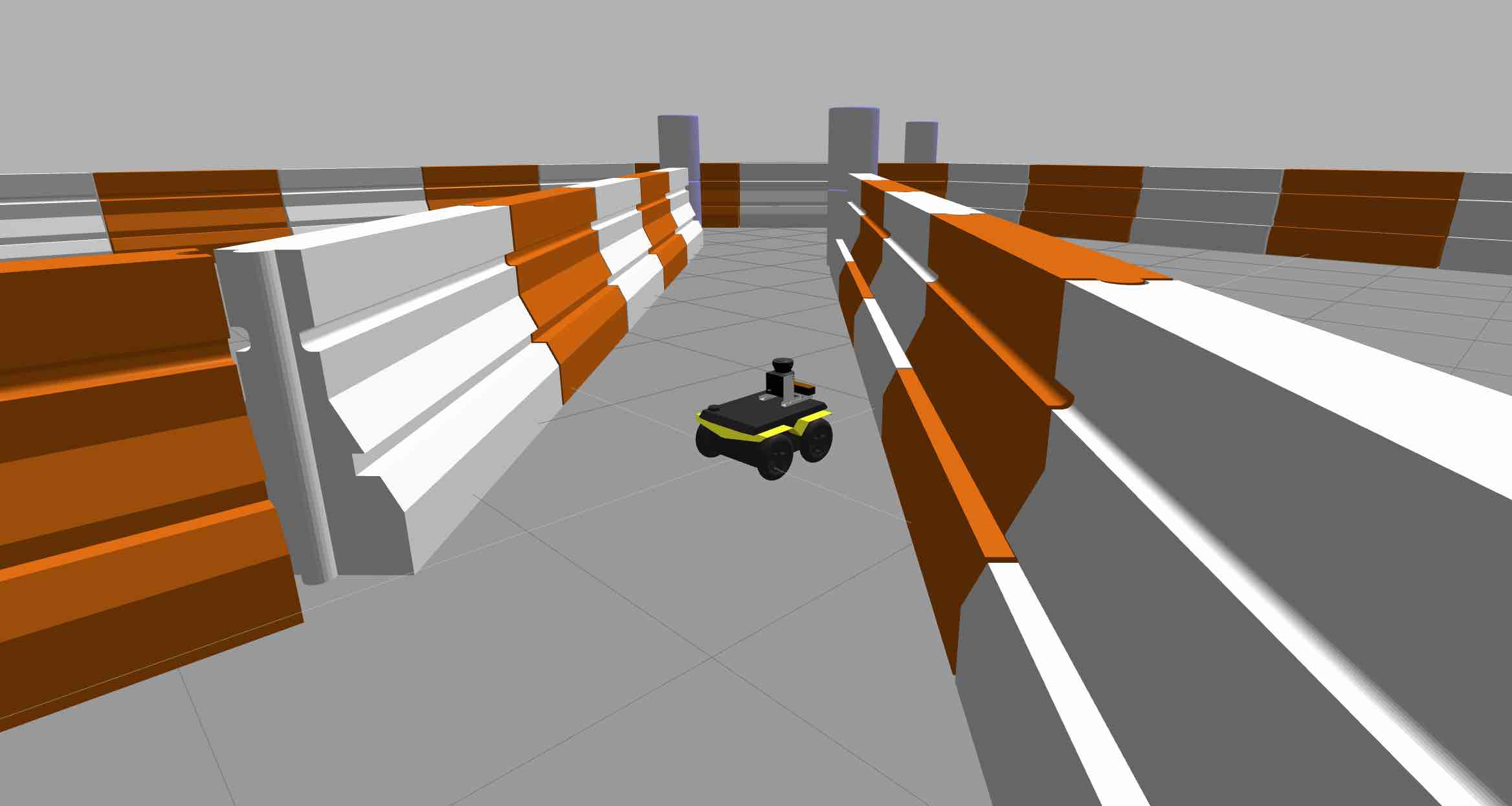
With the Jackal robot simulation, you can do similar stuff without the risk of damaging the real version. You can use it to test any algorithms, such as Robot Navigation, Motion Planning, Object detection. Once you have your code working in the simulation, you can directly execute it in the real Jackal robot, with minimal to no changes!
Works with
ROS 1

About Jackal

(image source: Clearpath)
Jackal is a small, fast, entry-level field robotics research platform. It has an onboard computer, GPS and IMU fully integrated with ROS for out-of-the-box autonomous capability. As with all Clearpath robots, Jackal is plug-and-play compatible with a huge list of robot accessories to quickly expand your research and development.
Related courses
Mastering with ROS: Jackal
Learn how to create real-world applications for a real robot. In this case Jackal robot from Clearpath Robotics.
Related resources
Tutorials - Stereovision in ROS
This video is an answer to the following question found on ROS Answers: https://answers.ros.org/question/234636/bumblebee-xb3-stereo-vision/
LIVE Class – Outdoors Robot Navigation for Agricultural Robots Using ROS
In this class, we are going to see how to make a ROS-based robot navigate outdoors by using a GPS. We will use a Jackal robot from Clearpath Robotics and their Gazebo simulation.
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/56be7145-2dd7-457d-a60e-e337aa889e45