Online Course
ROS2 Manipulation Basics
Learn the ROS2 Manipulation essentials – how to use MoveIt in ROS2 and use Perception for Pick & Place tasks.

Course overview
With ROS2 quickly becoming the standard for robotics and overcoming ROS1, it’s time to learn how to work with a robot arm in ROS2 systems. But it’s also essential to understand the current way of working because, in the short term, you will have to work with hybrid systems that use both ROS1 and ROS2. This is especially true in hardware ROS-enabled systems, which won’t be updated to ROS2 at least in a few years or even never if they are already in production and public use.
This course teaches the basics of having a robot arm up and running, moving around, and grasping objects using perception ROS 2.
What You Will Learn
ROS2 Moveit
ROS2 Object Detection
ROS2 Programatical Motion Planning
Cartesian Paths & Kinematics Plugin
100% Online
Intermediate Level
Approx. 12 hours to complete
Prerequisites
Simulated Robots Used
UR3e Robot Arm

This robot arm is composed of UR3e arm, OnRobot gripper and a 3D sensor for practicing objects detection and manipulating their positons.
RoBox OpenManipulator

A RoBox world composed of OpenManipulator (developed by Clarkson University) and cubes for practicing how to pick and place objects.
Course Final Hands-on Project
In the final project, you will use the OpenManipulator simulation to create a project and apply all you have learned in this course.

Syllabus
ROS2 Manipulation Demo
In this unit, you’ll get a brief introduction to the Course.
It contains a practical Demo of the course.
Let’s move the arm robot using MoveIt.
Unit 1: ROS2 Manipulation MoveIt
This unit will show you how to create a MoveIt2 Package for your industrial robot.
After completing this unit, you will create a package that allows your robot to perform motion planning.
What is MoveIt2?
MoveIt2 is the ROS2-compatible version of MoveIt. MoveIt is a ROS framework that allows you to perform motion planning with a specific robot. What does this mean? It means that it enables you to plan a movement (motion) from point A to point B without colliding with anything.
MoveIt2 provides a friendly and easy-to-use GUI, which helps you interact with the robot to perform motion planning. However, before using MoveIt2, you need to build a MoveIt2 package. This package will contain all the configuration and launch files required for controlling your robot with MoveIt2.
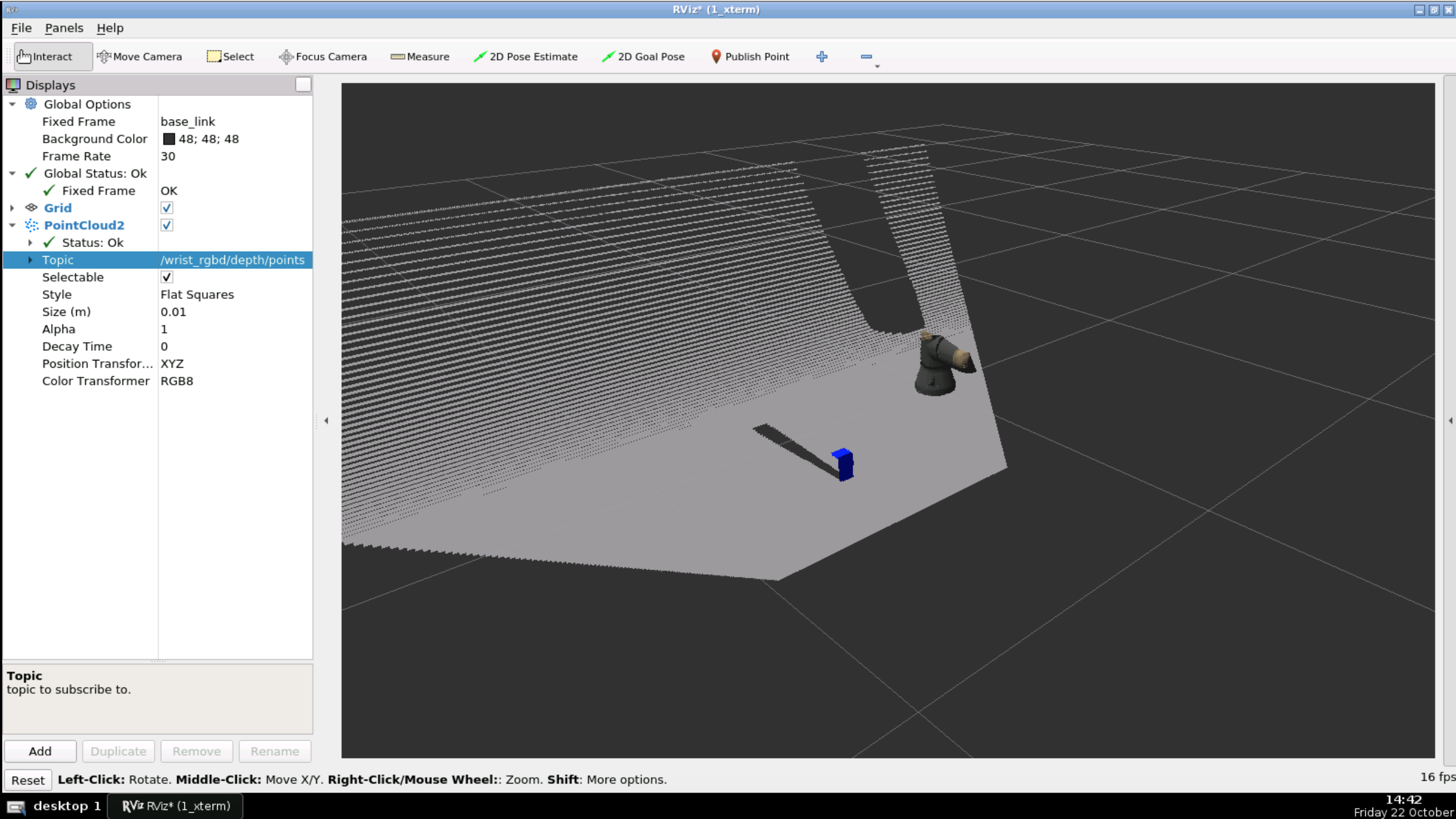
Unit 2: ROS2 Manipulation Perception
This unit will show you how to perform motion planning with Python.
By completing this unit, you will be able to create a Python program that performs motion planning on your robot.
In robotics, we understand perception as how robots can perceive the world that surrounds them based on input sensory data. This perception of the environment is very helpful for robots to perform any required task.
Unit 3: ROS2 Motion Planning
This unit will show you how to perform motion planning with C++. You will create a C++ program that performs motion planning on your robot by completing this unit.
Unit 4: Cartesian Paths & Kinematics Plugin
This unit will show you how to perform Cartesian Paths with MoveIt.
Additionally, you will learn how to change the Kinematics plugin for MoveIt.
Final Project: ROS2 Manipulation Project
In this unit, you will create a project and apply all you have learned in this course, using a different simulated arm.
What our students think
“I have had a great experience with The Construct. I believe much of what I have learned thus far regarding ROS has been from these courses and the concepts behind the implementation of ROS have been helpful even outside of ROS applications.“
“I’m very happy about working with The Constructsim, it is affordable, it is very comfortable for me, and the tools in the GUI are very useful“
“I really liked the learning approach based on projects and practical examples and I found the final project with an actual robot to be very useful and challenging.“
Course creator

Miguel Angel Rodriguez
Head of Research @ The Construct | Creator of over 20 ROS & AI for Robotics courses | Author of ROS IN 5 DAYS book collection.

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Author of ROS IN 5 DAYS book collection
Related courses
ROS 2 Basics (C++)
Learn how to start working with Robot Operating System 2 (ROS 2)
ROS 2 Basics (Python)
Learn the fundamentals of ROS 2 to understand and be able to program robots

ROS2 Navigation
Learn to autonomously navigate robots in ROS 2
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED