ROS2, the improved version of ROS (ROS1), is quickly becoming the standard for developing robotics applications.
In this post, we will take a look at how to build a local Debian package out of a ROS 2 package that you have in your system. Private Debian packages (*.deb files) are easy to share, install, upgrade and uninstall without you having to share any source code.
You can easily install them with sudo dpkg -i pkg-name.deb, for example.
It is highly recommended that you follow the previous posts of this series:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/5142d6f5/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Let’s start by compiling the ros2_draw_squares package that is inside the ~/ros2_ws/src folder. In order to do that, we need a terminal. You can open one by clicking the Open a new terminal button.
Open a new Terminal
Once the terminal is open, we can compile the package using the following commands:
cd ~/ros2_ws
colcon build
source install/setup.bash
Starting the simulation
Before showing the process of creating the Debian file, let’s see it in action first through a robot simulation.
Let’s start by exporting the GAZEBO_MODEL_PATH variable to the location of the turtlebot3 model files, so that the Gazebo Simulator can show the robot properly:
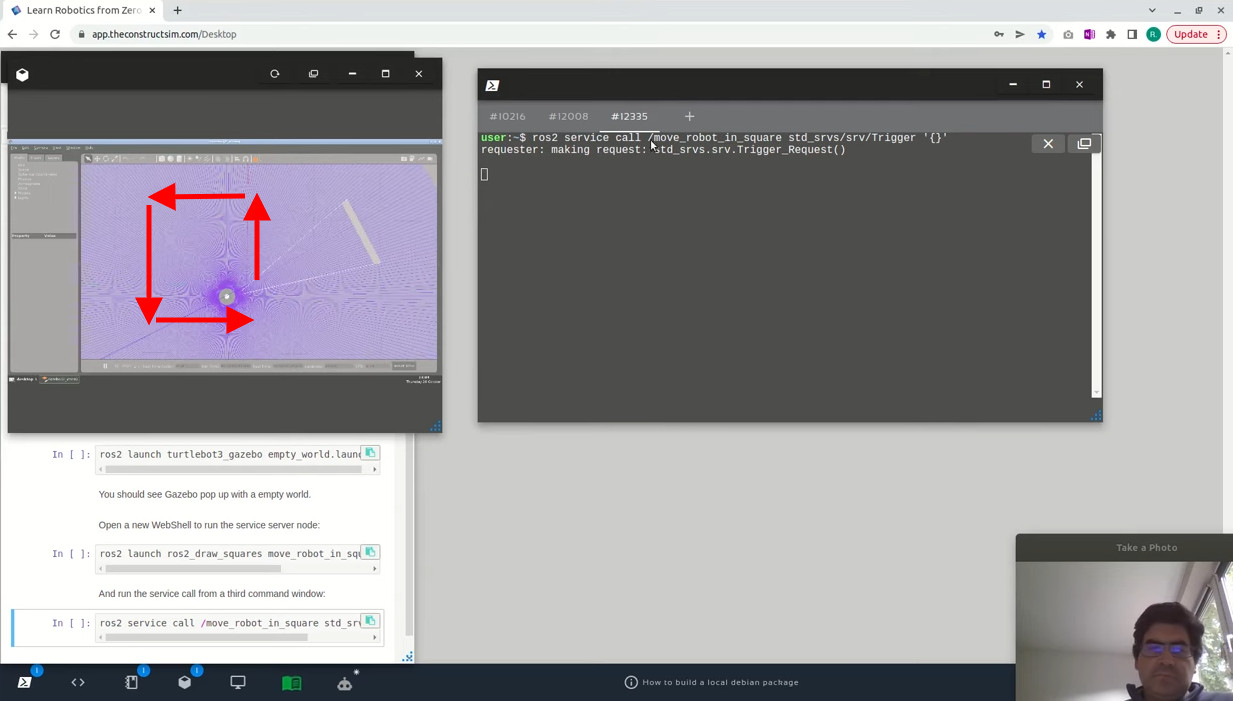
And from a third terminal, we can run the service move_robot_in_square.
ros2 service call /move_robot_in_square std_srvs/srv/Trigger '{}'
If everything went ok, in the simulation window you should have seen the Turtlebot robot moving in a square-like format.
Turblebot robot moving in a square-like format
Alright, we already saw the package in action. Now let us see the process of converting it into a Debian file.
Feel free to kill the existing simulation by pressing CTRL+C in the three terminals.
What is a Debian package and what is it used for?
A .deb file in essence it’s a very simple and easy way of distributing software in Debian-based Linux distributions. You can think of it as a file similar to a .tar file which is a format used to store multiple files in one single file. Using a Debian package we can install a ROS2 package in our environment without having to have the source files.
So for instance the example project contains the following files and directories:
The Debian file will consist of only one single file.
Deb files also hold metadata about the software they provide. By the use of metadata, Debian packaging handles the installation, removal, and dependencies of packages.
In the context of robotics, Debian files provide a convenient way to deploy and remotely manage robotic software on real robots. This includes installing, updating, and removing packages through an SSH (Secure Shell) connection, for example.
Get the building dependencies
After having stopped everything by pressing CTRL+C in the three terminals, the next thing we need to do is to actually install the building tools needed by running the following commands in the first terminal:
This will install the tools python3-bloompython3-rosdep, fakeroot, and dh-make packages.
Since this can take a while to install, you just have to wait a bit for it to finish.
Check the ROS2 package dependencies
All of the dependencies of the package should be properly declared in the package.xml file of the ROS 2 package.
Still in the first terminal, let’s see the dependencies that we have for our package:
cat ~/ros2_ws/src/ros2_draw_squares/package.xml
We just have to make sure all package dependencies are listed using the correct dependency tag. If when creating your own package you are not sure what kind of dependency a package is, you can use <depend> tag to specify that the dependency is a build, export, and execution one.
Initialize rosdep
Let’s initialize rosdep. That can still be done in the first terminal:
sudo rosdep init
You might see the following error if rosdep has already been initialized in the past:
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
Don't worry. This error message can be ignored since it has no effect whatsoever.
Create a Debian installable package
In order to creat the Debian package, let's start by moving to your package root directory, which is the directory that contains the package.xml file (using the first terminal):
cd ~/ros2_ws/src/ros2_draw_squares
After that, let’s use the bloom-generate command:
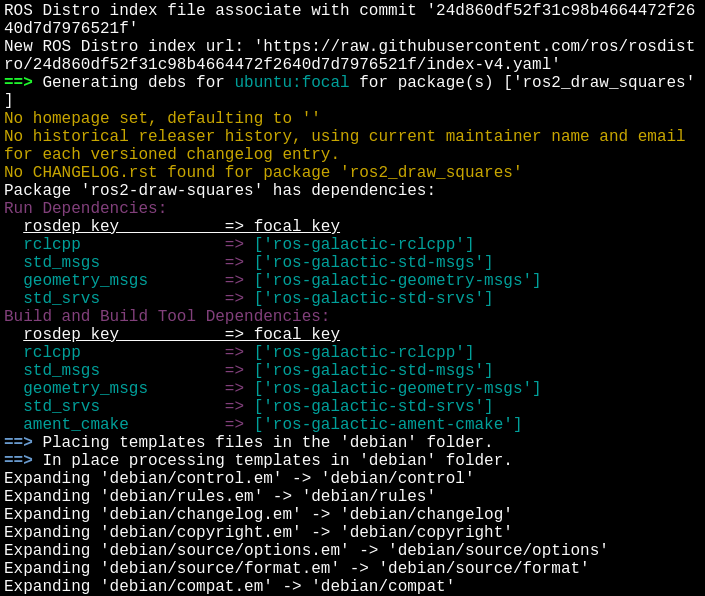
bloom-generate rosdebian
The expected output is something similar to the following:
bloom-generate rosdebian output
If for whatever reason you get an error message like the one below:
Could not resolve rosdep key
This means that rosdep could not find that particular package dependency. Verify if the package must be indexed in the rosdistro by creating a PR.
After successfully running the above command, you should get a directory named debian in the current directory, which contains the compiled files and rules required to create the Debian file. The “ls” command output should be like this:
CMakeLists.txt README.md debian include launch package.xml src
Use the following command to create a Debian package:
fakeroot debian/rules binary
We should see something similar to the following animation:
fakeroot expected output
After a while, the command should finish with no errors.
The command we just executed should have created a .deb file in the directory that is one level above. We can check it with:
cd ..
ls
Which should show us the following:
Debian file created
Install a ROS2 package from a local Debian installable file
Alright, our Debian file has been successfully generated.
Let us install this Debian package on our own machine by using the package management program called dpkg:
This will install the Debian package (including unpacking and configuring) onto the file system of the hard disk.
dpkg install output
After having installed the Debian package, it is ready to be used in our environment. Let’s find out where the package got installed. To do so we first need to get the package name:
Once we have the name, we can display where the files in the deb package got installed to:
dpkg -L ros-galactic-ros2-draw-squares
We can see that this package is now installed in the same location where the main ROS 2 installation is located.
Finally, in case you want to uninstall this package, we can easily do it also with dpkg:
sudo dpkg -P ros-galactic-ros2-draw-squares
And if you want to take it further from here, you can even create your own apt repository to host your private ROS2 .deb packages, but that’s a story for another time.
Congratulations on reaching the end of this tutorial. We hope this post was really helpful to you.
If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/50fbfe47/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Opening the Code Editor
Now that the rosject is open, let’s open the Code Editor by clicking on the second link:
Open the IDE – Code Editor
Once the Code Editor is open, you should be able to see that we have a ros2_ws folder (ROS2 workspace)
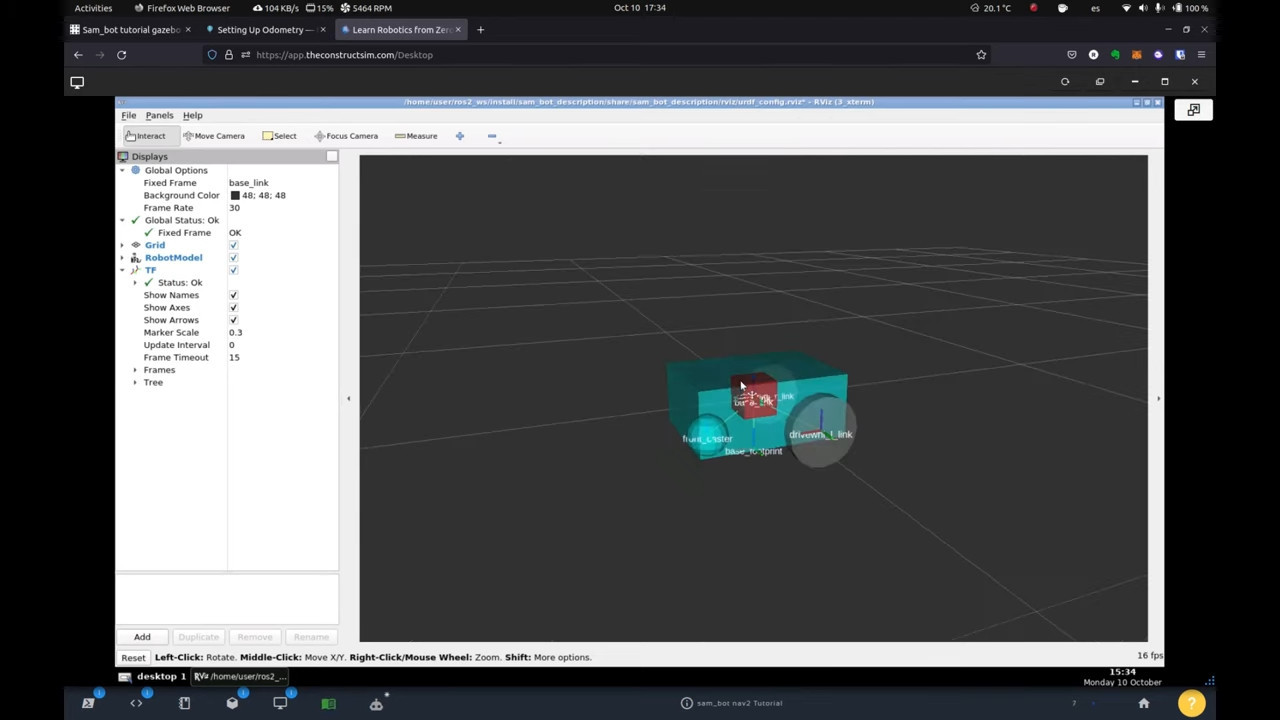
The sam_bot_description.urdf file
Now that you have the Code Editor open, let’s have a look at the file that contains the robot description. The file is inside the ros2_ws folder. The full path is:
As we saw in the overview, the question asked in ROS Answers was saying that the robot wheels were not working. That happened probably because the person forgot to add something to the URDF file.
Now, go to the terminal you have open and run the following command to run the simulation:
ros2 launch sam_bot_description display.launch.py
If everything went well, you should have Gazebo as well as RViz open, like in the image below (If the Graphical Tools don’t open automatically, just click click the 4th and 5th buttons on the bottom left bar to Open Gazebo and Open the Graphical Tools):
You can also see the Gazebo simulation by clicking the 4th icon named Open Gazebo. There you will see that the wheels are in place.
Well, that is pretty much it.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Before anything else, in case you want to use the logo above on your own robot, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to have navigation in ROS2 working with two robots, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/50f92c5f/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, head to the next section to get some real practice.
Launching the simulation
We already have provided a simulation with two simulated robots. In order to run the simulation, let’s start by opening a terminal:
Open a new Terminal
Once the terminal is open, we can run the simulation with the following command:
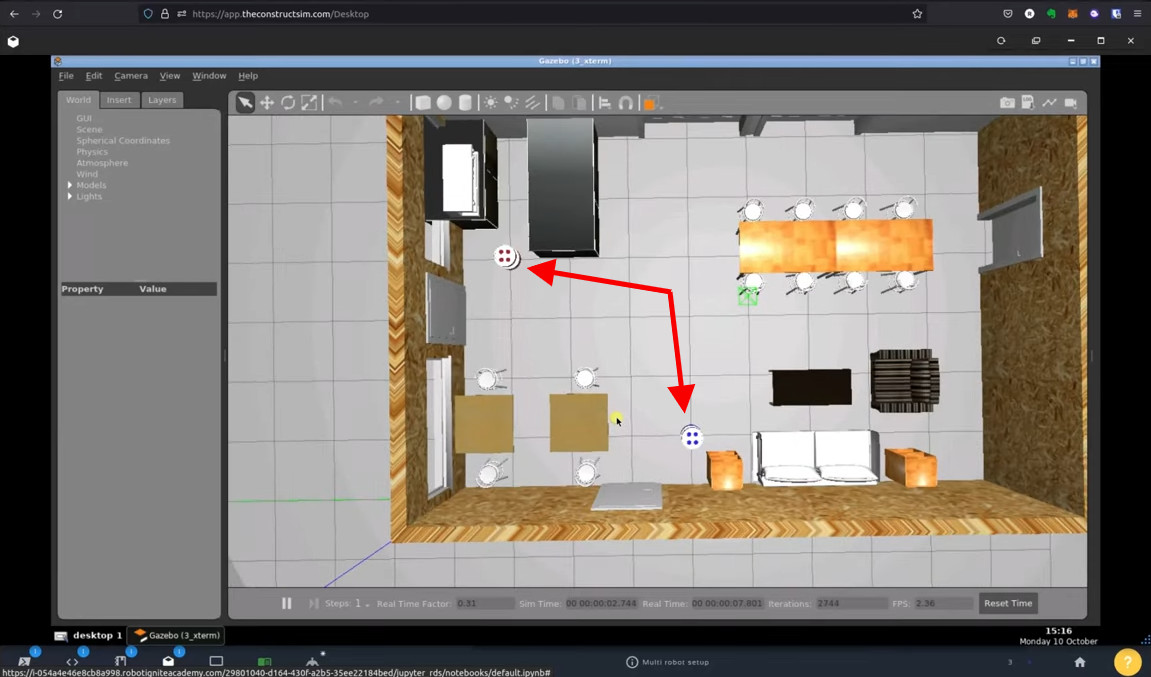
You should have a pop-up with the simulation running. If the simulation fails to load for any reason, just run the same command again. You should have a simulation with two robots, something similar to the following:
How to setup identical robots for multi-robot navigation – gazebo simulator
What we need in order to have multi-robot navigation is:
First, have the cmd_vel and scan topics separated into different namespaces
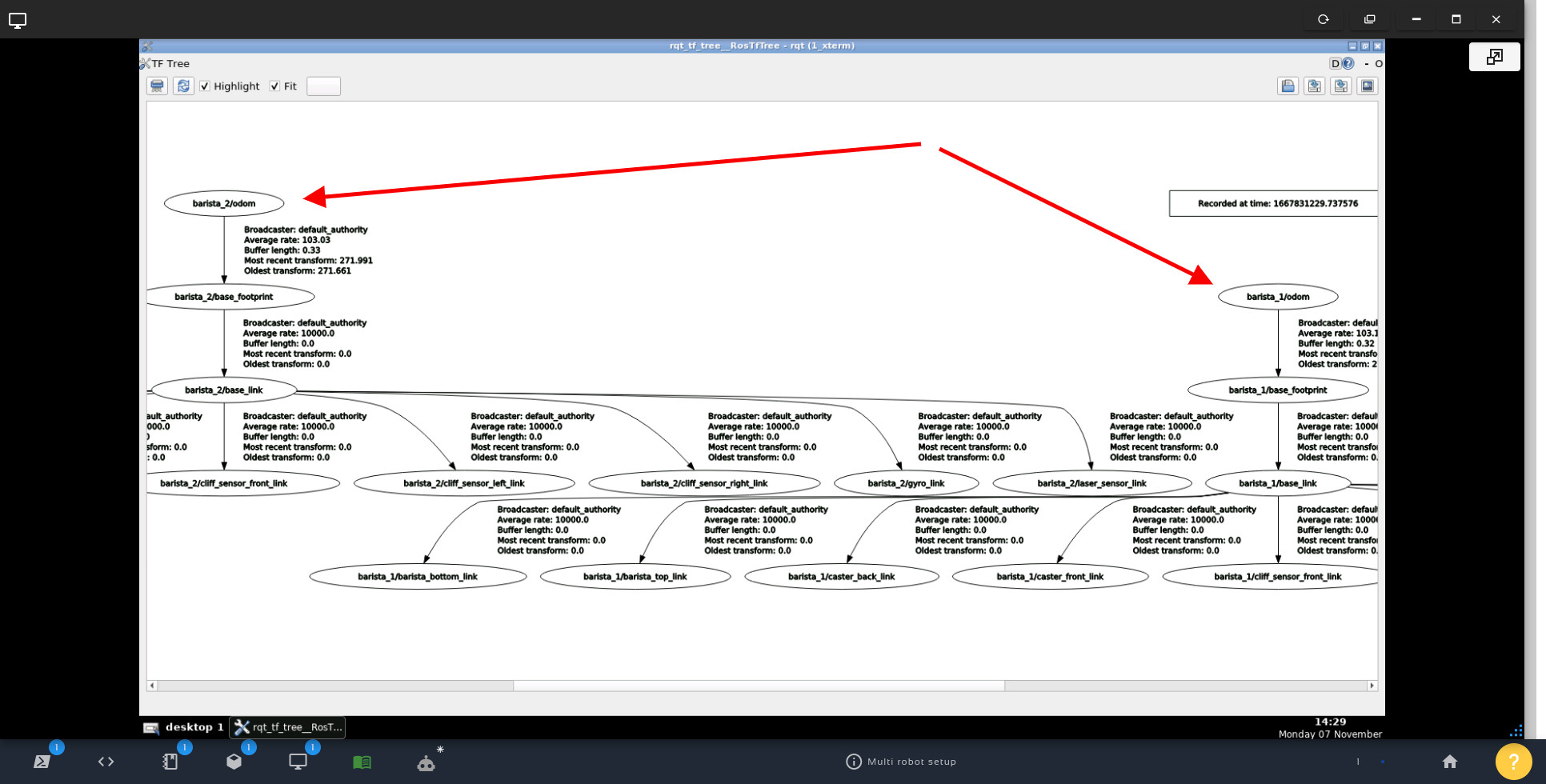
Second, have TF Tree separated.
After launching the simulation, we can go to a second terminal and list the topics with rostopic list. The list of topics should be like the following:
As we can see, we have two namespaces, named /barista_1/ and /barista_2/
Moving the robots independently
If we want to move the barista_1 robot, for example, we can run the command below:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=barista_1/cmd_vel
The command above launches the script that allows us to move the robot using the keyboard, mapping the cmd_vel topic to barista_1/cmd_vel. That is the topic used to move the robot around.
You can press the “k” key to stop the robot, and other keys to move the robot, as we can see in the instructions:
This node takes keypresses from the keyboard and publishes them
as Twist messages. It works best with a US keyboard layout.
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
If instead of the red robot you want to move the blue one, you just run the same command but remapping the cmd_vel topic tobarista_2/cmd_vel:
ros2 run teleop_twist_keyboard teleop_twist_keyboard cmd_vel:=barista_1/cmd_vel
Separated TF Trees
To see the separated TF Trees, we can run rqt_tf_tree. We can install it for ROS Galactic in a third terminal using the following commands:
Once it is installed, you can run it with the command below:
ros2 run rqt_tf_tree rqt_tf_tree
A Graphical Window should pop up. If not, you click the fifth icon on the bottom left menu to have it. As you can see below, we have two TF Trees, one for each robot:
2 two TF Trees on The Construct – Multi-Robot navigation
How the simulation and the multi-robot navigation were prepared
To better understand the code, let’s open the Code Editor by clicking on the second link:
Open the IDE – Code Editor
You will see that inside the ros2_ws/src folder we have a package named barista_ros2. You can also navigate to that folder using the terminal if you want:
cd /home/user/ros2_ws/src
ls
You will find the following folders inside the barista_ros2 package.
Inside the barista_gazebo package, we have the main_two_robots.launch.xml file used to spawn the two robots. We can check its content using the Code Editor, or using the terminal with the following command:
That function essentially returns the robot_name, used as the namespace for the robot, and also returns its initial position.
In that barista_1.launch.py we can see that it also includes spawn.launch.py (available at ~/ros2_ws/src/barista_ros2/barista_description/launch/spawn.launch.py)
One of the important functions of spawn.launch.py is the launch_setup function, especially the definition of robot_state_publisher_node and joint_state_publisher_node, where we specify the frame_prefix and the robot_description.
Please, look carefully at that file to better understand it.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, we will learn how to use a simulator other than Gazebo in ROS. We are going to use the Webots Simulator, whose code is available at https://github.com/cyberbotics/webots
ROS Inside!
ROS inside
Before anything else, in case you want to use the logo above on your own robot, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to work with Webots with ROS 2, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/5020588f/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Let’s now head to the next section to really get some real practice.
Opening the Code Editor
Let’s start by opening the Code Editor by clicking on the second link:
Open the IDE – Code Editor
Once the Code Editor is open, you should be able to see that we have the webots folder in the root.
In order to start Webots using the command line, let’s start by opening a terminal:
Open a new Terminal
Now, to open Webots we only need the two following commands:
cd ~/webots
./webots
After a few seconds, you should have a pop-up with a Webots ROS2 Simulation (by default it shows the last simulation we used). If the pop-up doesn’t open, you can have it by clicking on the 4th Icon of the bottom bar.
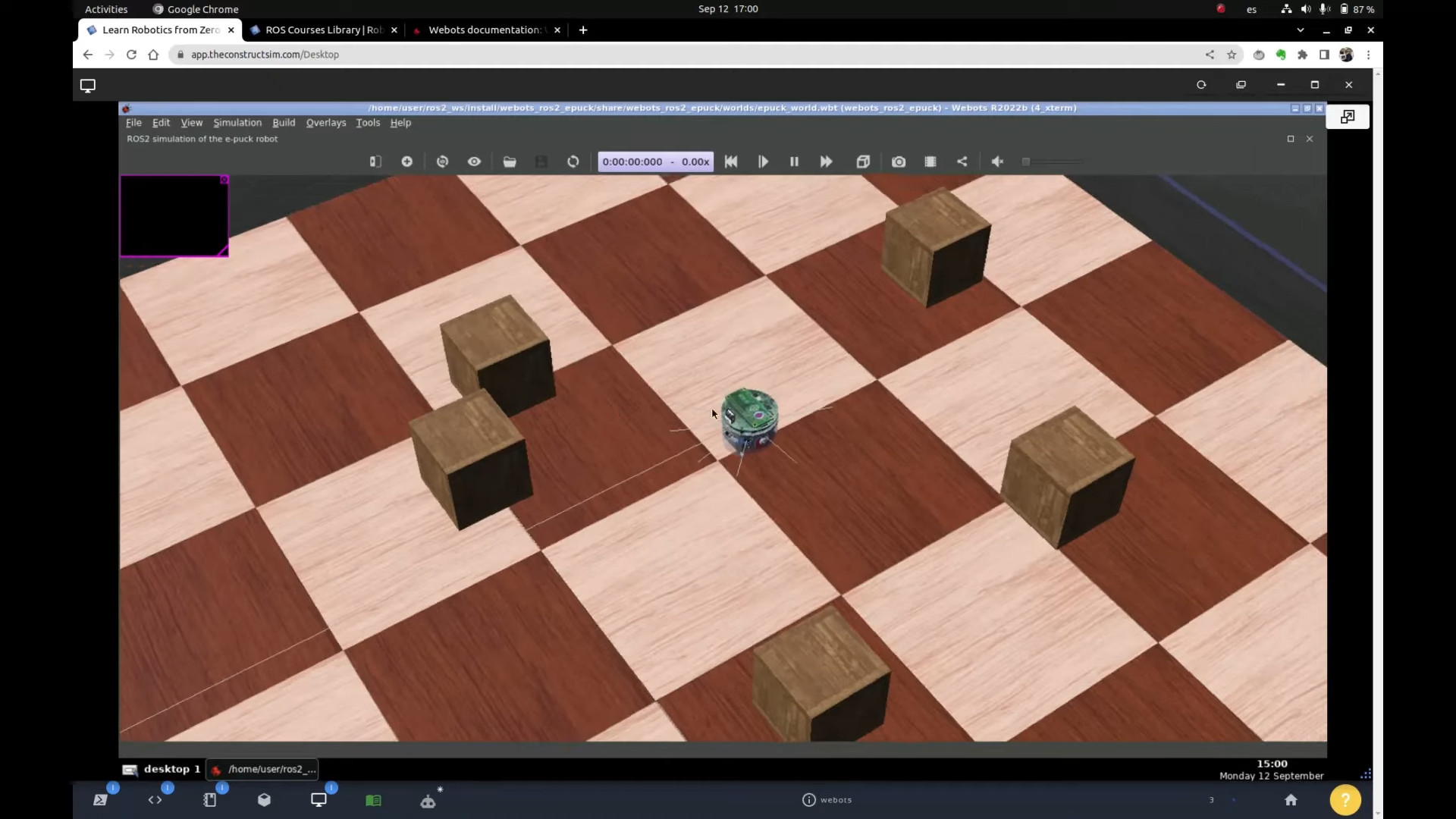
Webots ROS2 Simulation
Ok, now that you know how to open Webots manually, feel free to close the simulator by pressing CTRL+C on the command line, or manually pressing the Close Webots button available on the top right corner of the simulator.
Launching a Webots world
As you may have noticed, we have a workspace named ros2_ws. That workspace contains ROS2 packages ready for Webots.
Let’s launch a simulation using the following command:
ros2 launch webots_ros2_epuck robot_launch.py
That command will basically load the world that we saw in the previous picture.
You can now go to a second terminal and check the topics with:
ros2 topic list
If you want to move a robot, you would need external controllers, but that is a topic for another post.
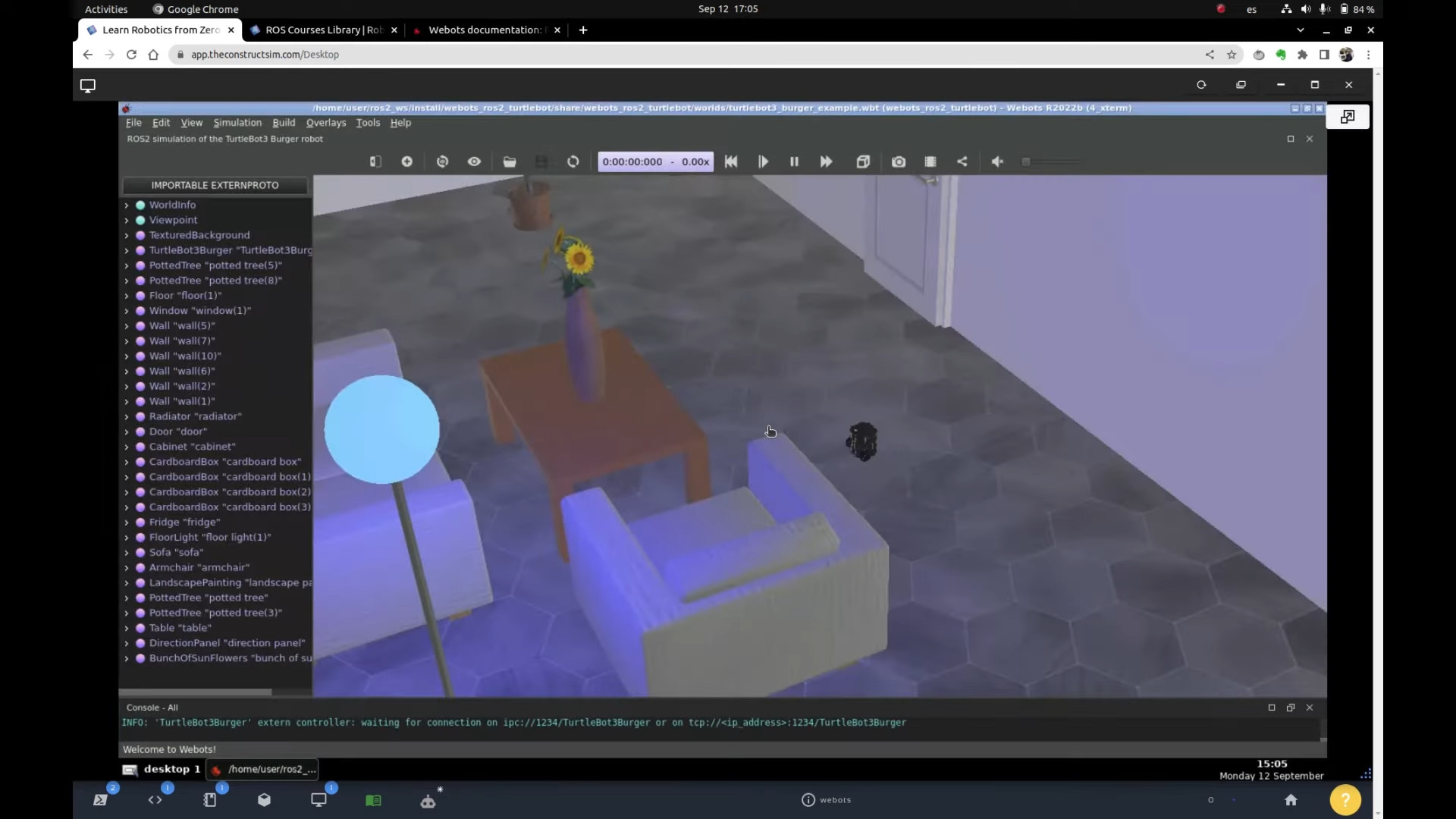
Another simulation you could launch with Webots is Turtlebot:
ros2 launch webots_ros2_turtlebot robot_launch.py
It may take a while to load because Webots downloads the assets in the background. But after a while, you should have the Turtlebot simulation up and running:
You can list the ros2 topics just as you did for the previous simulation:
ros2 topic list
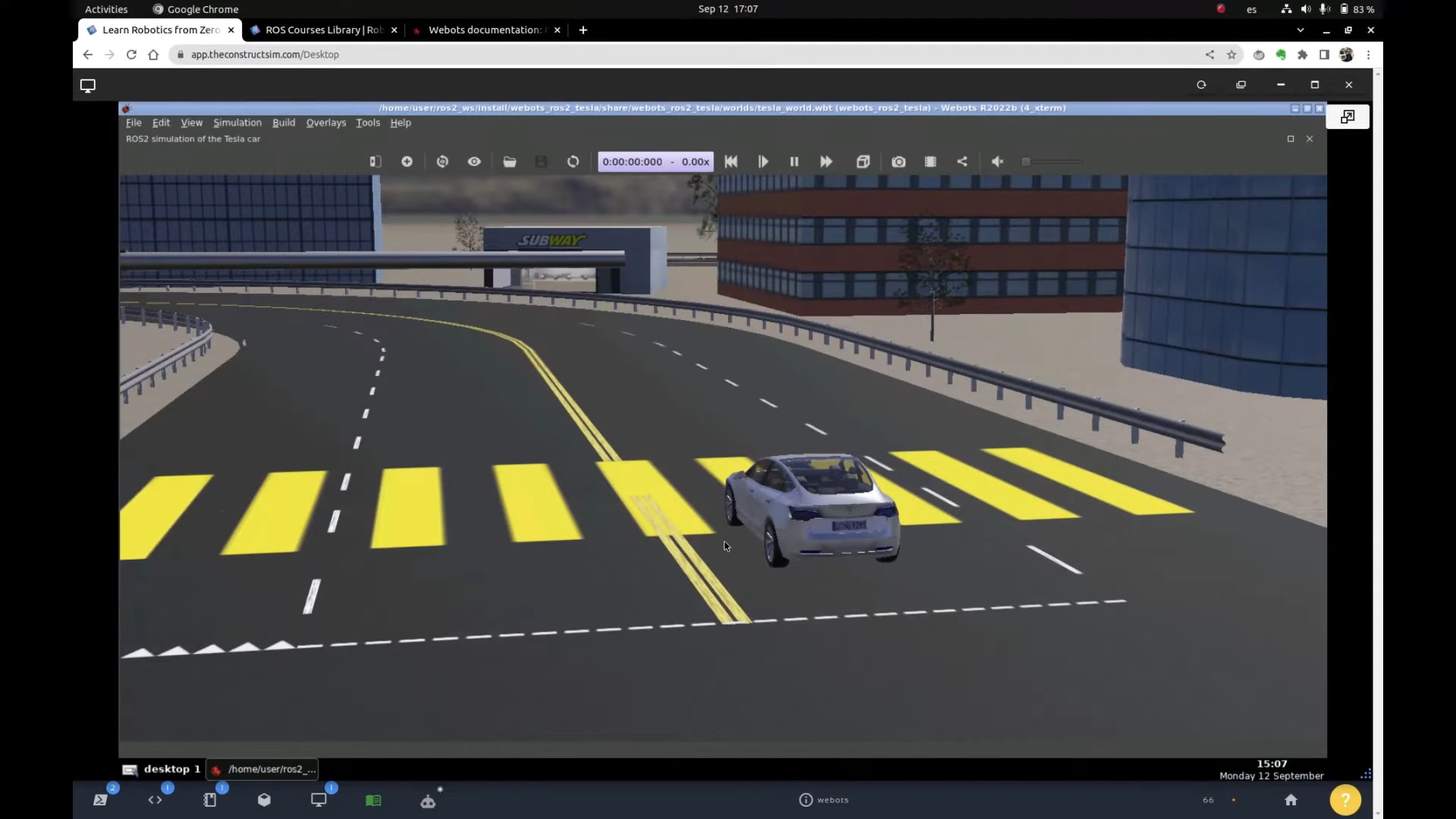
You can even load a Tesla simulation with Webots, in which you have a Tesla in a city:
ros2 launch webots_ros2_turtlebot robot_launch.py
Testa Simulation in Webots
Webots guided tour
You can also follow the Webots Guided Tour by clicking Help -> Webots Guided Tour, although most of the tours right now are still for ROS (ROS1).
Congratulations. You have just learned the basics of how to start a Webots simulation using ROS2. We hope this post was really helpful to you. If you want a live version of this post, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, you will learn how to create and use your own ros2 C++ library. I’ll show you how to create the library and then use it in a demo package.
Step 1: Fire up a system with ROS2 installation
“Hey, do you mean I have to install ros2 first?” Absolutely not! Just log in to The Construct to get access to virtual machines pre-installed with ROS.
Once logged in, click on My Rosjects, then Create a New Rosject, supply the information as shown in the video and click Create. Then RUN the rosject.
Create a new Rosject
You might also want to try this on a local PC if you have ros2 installed. However, please note that we cannot support local PCs and you will have to fix any errors you run into on your own. The rest of the instruction assumes that you are working on The Construct; please adapt them to your local PC and ros2 installation.
Step 2: Create a new package that contains the library’s source code (logic)
Open a web shell
Open a web shell and run the following commands to create the package.
Now that your package is created, we need to create a header file for the library. Move inside the include/my_value_converter_library directory and create a header file named library_header.h.
cd ~/ros2_ws/src/my_value_converter_library/include/my_value_converter_library
touch library_header.h
Now head over to the Code Editor to make changes to the header file. Check the image below for how to open the Code Editor.
Open the Code Editor
Locate the header file in the code editor: ros2_ws > src > my_value_converter_library > include > my_value_converter_library > library_header.h and paste in the following code.
Now we need to edit the CMakeLists.txt file of our package to recognize the source code we have just added. Open the file ros2_ws > src > my_value_converter_library > CMakeLists.txt and add the following lines before the ament_package() call.
# let the compiler search for headers in the include folder
include_directories(include)
# define a library target called my_value_converter_library
add_library(my_value_converter_library src/my_value_converter_library.cpp)
# this line to exports the library
ament_export_targets(my_value_converter_library HAS_LIBRARY_TARGET)
# install the include/my_cpp_library directory to the install/include/my_cpp_library
install(
DIRECTORY include/my_value_converter_library
DESTINATION include
)
install(
TARGETS my_value_converter_library
EXPORT my_value_converter_library
LIBRARY DESTINATION lib
ARCHIVE DESTINATION lib
RUNTIME DESTINATION bin
INCLUDES DESTINATION include
)
So much for all the hard work – now is the time to see if it works. Time to compile the code. In the same web shell, run the following commands:
cd ~/ros2_ws
colcon build
Success! We have now created our library. Next, we are going to use it!
PS: if your code did not compile correctly, please go over the instructions and ensure you have created the files in the exact locations specified.
Step 3: Create a new package that uses the library you just created
Create the new package in the open shell. Note that my_value_converter_library is passed as a dependency during the creation of the new package. This will simplify some of the work that needs to be done when modifying the CMakeLists.txt file.
Now verify that the dependencies have been properly added. If the build runs successfully, it is so. If not, please correct the errors before you proceed.
cd ~/ros2_ws
colcon build
If you got to this point, great! Now we will create the C++ source code that will use your library.
cd ~/ros2_ws/src/my_value_converter_node/src
touch my_value_converter_node.cpp
Now locate the my_value_converter_node.cpp file in the code editor and paste in the following source code.
#include <memory>
#include <string>
#include "my_value_converter_library/library_header.h"
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/float32.hpp"
class ConverterNode : public rclcpp::Node {
public:
explicit ConverterNode() : Node("converter_node") {
auto callback =
[this](const std_msgs::msg::Float32::SharedPtr input_msg) -> void {
RCLCPP_DEBUG(this->get_logger(), "I heard: [%f]", input_msg->data);
// Use the library
// Map an value from 0 - 1023 range to -1.0 to +1.0 range
double new_value = map_value(input_msg->data, 0, 1023, -1.0, 1.0);
output_msg_ = std::make_unique<std_msgs::msg::Float32>();
output_msg_->data = new_value;
RCLCPP_DEBUG(this->get_logger(), "Publishing: '%f'", output_msg_->data);
pub_->publish(std::move(output_msg_));
};
sub_ = create_subscription<std_msgs::msg::Float32>("output_topic", 10,
callback);
// Create a publisher
rclcpp::QoS qos(rclcpp::KeepLast(7));
pub_ = this->create_publisher<std_msgs::msg::Float32>("input_topic", qos);
}
private:
std::unique_ptr<std_msgs::msg::Float32> output_msg_;
rclcpp::Publisher<std_msgs::msg::Float32>::SharedPtr pub_;
rclcpp::Subscription<std_msgs::msg::Float32>::SharedPtr sub_;
};
int main(int argc, char *argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<ConverterNode>();
RCLCPP_INFO(node->get_logger(), "My value converter node started.");
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
As you might have expected, we need to modify the CMakeLists.txt file for our new package. Locate the ros2_ws > src > my_value_converter_node > CMakeLists.txt in the code editor and paste in the following code before the ament_package() call.
# define the binary to be built and identify the source files with with which to build it
add_executable(main src/my_value_converter_node.cpp)
# tell CMake that the executable "main" depends on the library "my_value_converter_library"
ament_target_dependencies(main my_value_converter_library rclcpp std_msgs)
# install the executable in the lib folder to make it detectable through setup.bash
install(TARGETS
main
DESTINATION lib/${PROJECT_NAME}/
)
Now build and use your package!
cd ~/ros2_ws
colcon build
source install/setup.bash
ros2 run my_value_converter_node main
Step 4: Check your learning
Do you understand how to create a ros2 C++ library? If you don’t know it yet, please go over the post again, more carefully this time.
(Extra) Step 5: Watch the video to understand how to install a ros2 binary package
Here you go:
Feedback
Did you like this post? Do you have any questions about how to create a ros2 C++ library? Please leave a comment in the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS2 topics, please let us know in the comments area and we will do a video or post about it.
How to create a ros/rosdistro source entry so that your package can be released with ROS. Something like: sudo apt-get install ros-humble-my-package-name
ROS2, the improved version of ROS (ROS1), is quickly becoming the standard for developing robotics applications.
In this post, we will learn the second part on how to release a ROS2 package as a binary file. Binary files are pre-built executables. They are easier to install because they do not require building from the source code. Binary files are perfect if you want to easily distribute a package to other people.
You can easily install them with apt-get install PKG_NAME, or sudo dpkg -i pkg-name.deb, for example.
It is highly recommended that you follow that Part 1, since it is a requirement for following this post:
Before anything else, in case you want to use the logo above on your own robot or laptop, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to release a ROS 2 binary package, we need to have ROS2 installed in our system, and it is also useful to have some simulations. To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/50995c4e/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
How to release a ROS 2 binary package – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Let’s now head to the next section to really get some real practice.
Assumptions
Existing ROS2 Package, publicly available for everyone to use
Started a new release team (pull request is pending)
Installed the tools required on our machine
Created a GIT access token to authenticate
Open a terminal
You will need to clone a repository soon, so, in order to do that, you will need a terminal. If you are new to the platform, you can easily open a terminal by clicking on the first button on the bottom left.
Open a new Terminal
Create a ros/rosdistro source entry
What is ros/rosdistro? https://github.com/ros/rosdistro is a GitHub repository that maintains information describing ROS packages and repositories. The build process accesses this information to build packages.
The rosdistro repository also stores the rules used by rosdep to install external dependencies.
When you create a ros/rosdistro source entry for a package that you release for the very first time, your repository will be reviewed to check whether it conforms to some basic rules.
Here is an example of some of the validations performed:
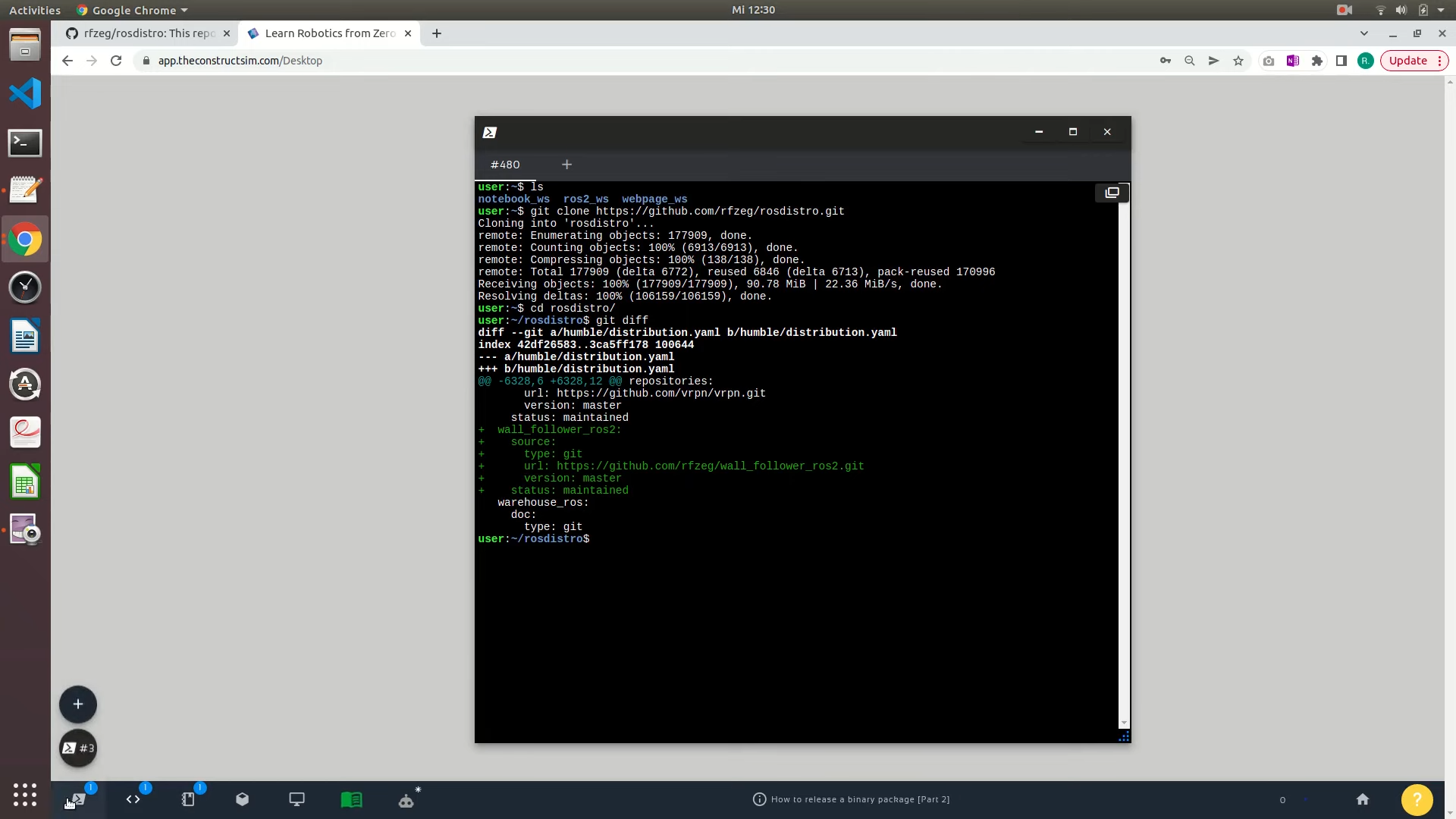
Now, go back to the rosdistro root directory and run the following command:
rosdistro_reformatfile://"$(pwd)"/index.yaml
This will make the files comply with rosdistro’s special formatting rules.
Check the differences made by the script you just ran:
gitdiffdistribution.yaml
which should show something like this:
git diff
If everything looks good, you are ready to commit your changes:
gitcommit-m"Add wall_follower_ros2 repo"
Push your changes to your remote GitHub repository:
gitpushoriginmaster
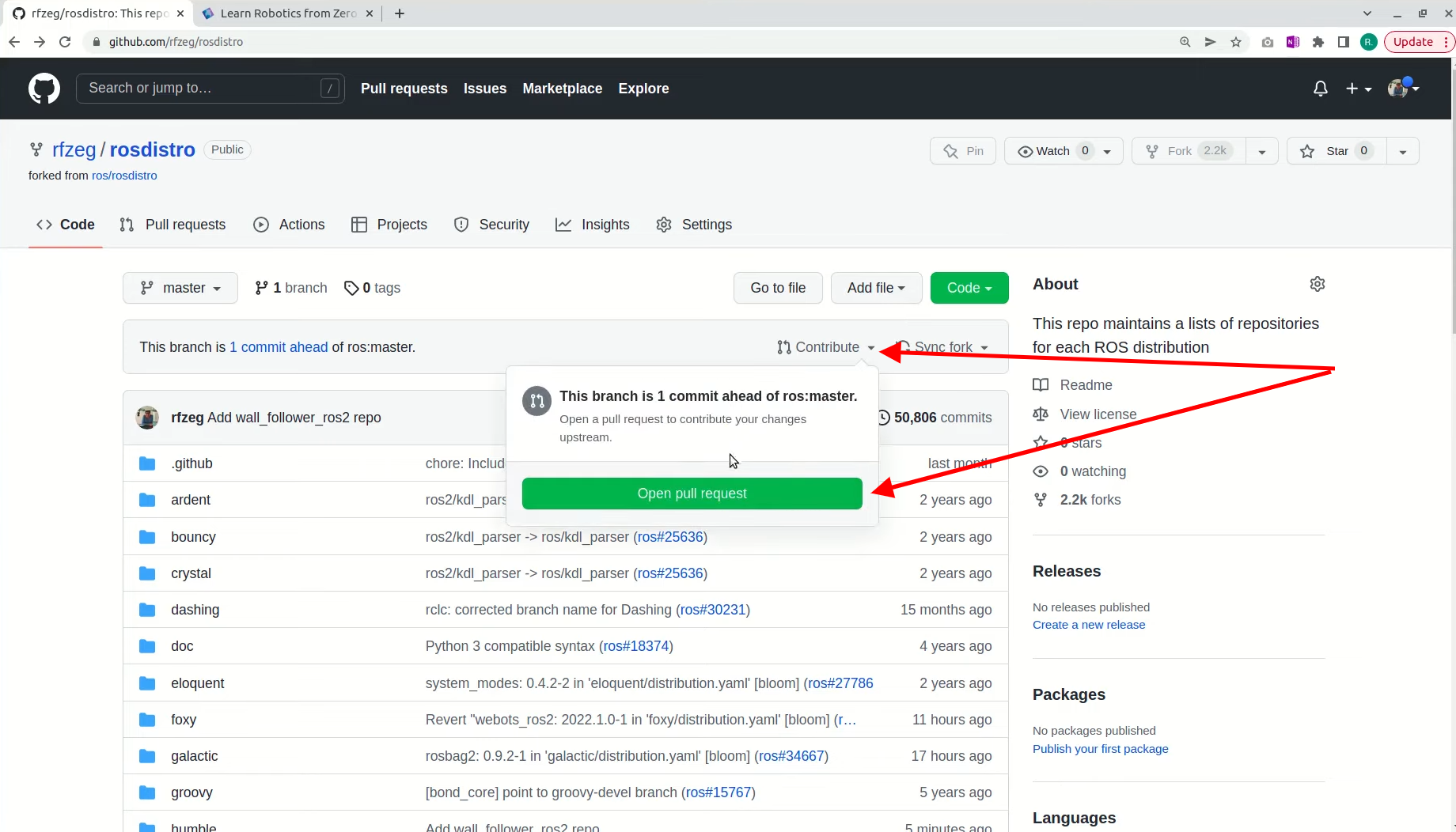
Create and Submit a pull request on GitHub to the rosdistro project to add your source entry to the indexer.
To create a new request, go to your repository and click the Contribute -> Open pull request button:
Open a Pull Request for rosdistro
After that, git a title to the Pull Request. Title example:
Addwall_follower_ros2repotohumble
Then the body of the Pull Request goes like this:
Addingnewrepository:https://github.com/rfzeg/wall_follower_ros2.gittohumbleasrequestedinhttps://github.com/ros2-gbp/ros2-gbp-github-org/issues/99forthepurposeofreleasingthepackagewall_follower_ros2
# Checks
[x] All packages have a declared license in the package.xml
[x] This repository a LICENSE file
[x] This package is expected to build on the submitted rosdistro
Remember that after submitting your pull request, some changes may be requested, and since the reviews are done asynchronously, it can sometimes take a few days until the review is completed.
Now, if they ask you to modify anything, you just go ahead and do the modifications.
You may now want to go ahead and check how to build a Debian file locally:
Congratulations. We have finished the second part about the release of a ROS2 Binary package. We hope this post was really helpful to you. We soon may have an extra part related to this subject.
Please bear in mind that the third part of this series can be found in the link below:
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:







![[ROS2 Q&A] How to spawn robot from sam_bot nav2 tutorial #237](https://www.theconstruct.ai/wp-content/uploads/2022/11/How-to-spawn-robot-from-sam_bot-nav2-tutorial.jpeg)


![[ROS2 Q&A] How to setup identical robots for multi-robot navigation #236](https://www.theconstruct.ai/wp-content/uploads/2022/11/How-to-setup-identical-robots-for-multi-robot-navigation.jpeg)


![How to release a ROS 2 binary package [Part 2/3]](https://www.theconstruct.ai/wp-content/uploads/2022/10/release-a-ros2-binary-package-p2.jpg)