Today, I would like to dedicate the podcast to those students that aim to become ROS developers. If you are studying ROS for your undergraduate course, for your PhD thesis, for your job at a robotics company, just would to tell you that sometimes ROS can seem difficult and complex, but I can assure you that if you persevere you will master the beast and become a developer for robots with ROS. This episode is dedicated to you!
And today, it is my pleasure to introduce you Simon Steinmann. Simon is a student at University of British Columbia in Canada. There he works on his master thesis on robotics and machine learning. Since he needed to learn ROS for his thesis, Simon enrolled our Robot Ignite Academy to boost his ROS learning, and that is how I met him. Today, Simon is going to tell us more details about his ROS experiences.
This episode is dedicated to the notion that you can make an impact in society by creating the intelligence of the robots of the future. I want to convert you into a robotics developer.
In case you want to become a robotics developer, then you need to learn ROS.
Wait a minute! Some questions arise here!
First of all, why would I want to become a robotics developer?
Second, in case I wanted, why should I learn ROS?
Good questions!
I’m Ricardo Tellez from The Construct. In this podcast we are going to explore the answers to all those questions. Stay with me and add some
By the way, this podcast episode is dedicated to all the developers of the world. You are building the world.
In this episode we interview Zach Allen, CEO of Slate Robotics. At Slate Zach and his team develop what is called a mobile manipulator. What is a mobile manipulator? It is a robot that is able to navigate around an environment and it is also able to grasp things. In order to work with human stuff, the mobile manipulator must be big enough to reach objects in tables, and capable enough to reach objects in the ground. Zach is going to tell us about their TR2 robot, what are its main features and how did they achieve to provide such nice robot for under $4.000. That is an impressive feat since other mobile manipulators around cost in the range of the $50.000.
Today, I would like to dedicate the podcast to the ROS Developers that participate at the European Robotics League. That is a robotics competition founded by the European Union, where participants can compete in urban environments. I know how difficult it is to make something work in the robot, so, for all those that are trying to do it for this League, this episode is dedicated to you.
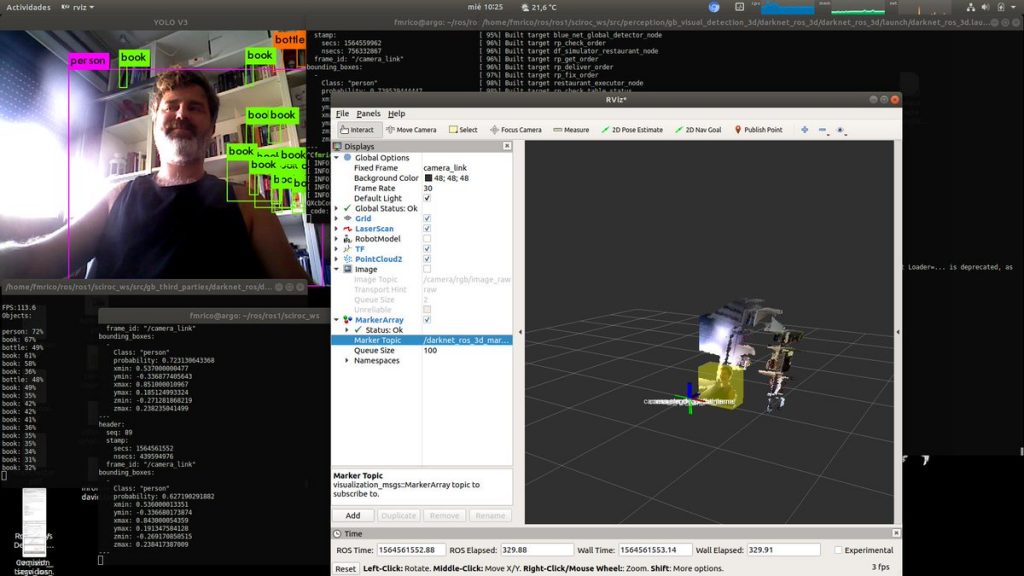
And today, it is my pleasure to introduce you Francisco Martin. Francisco is associate professor at Rey Juan Carlos University (Madrid, Spain) and member of Robotics Lab. He is a participant at the European Robotics League, at the Smart CIties RObotics Challenges. For that competition, Francisco has created a ROS package named darknet_ros_3D. He is going to tell us about this package and how they are using it at the competition.
Francisco Martin shows how Darknet ROS 3D works to detect object locations
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to the ROS Developers that are developing using C++. Really, you deserve a full day on the year dedicated to you. C++ ROS development is so much difficult than Python development, especially if you want to build complex systems with many nodes working. You still don’t have a day in the year, but at least, this episode is dedicated to you.
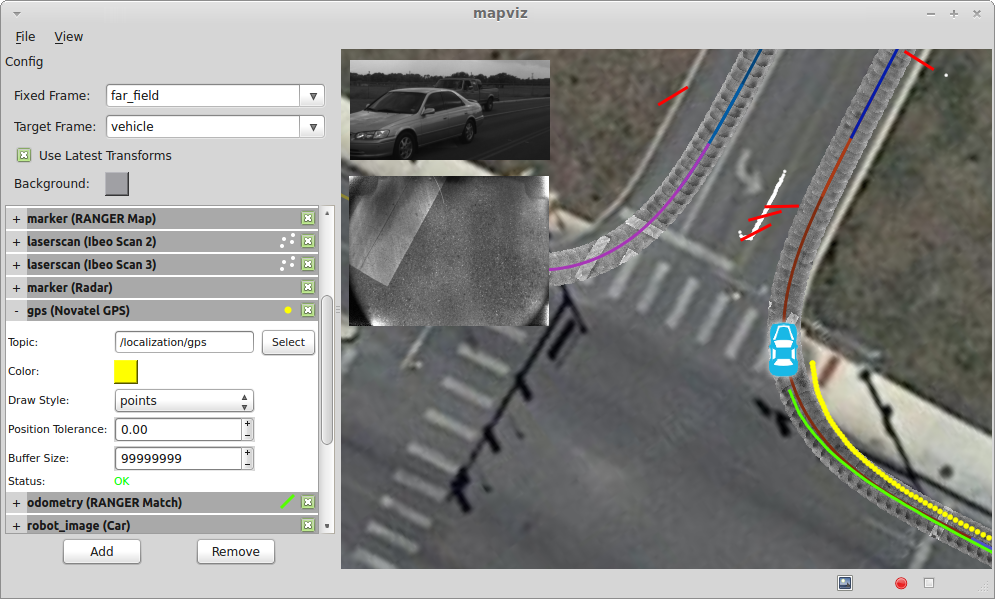
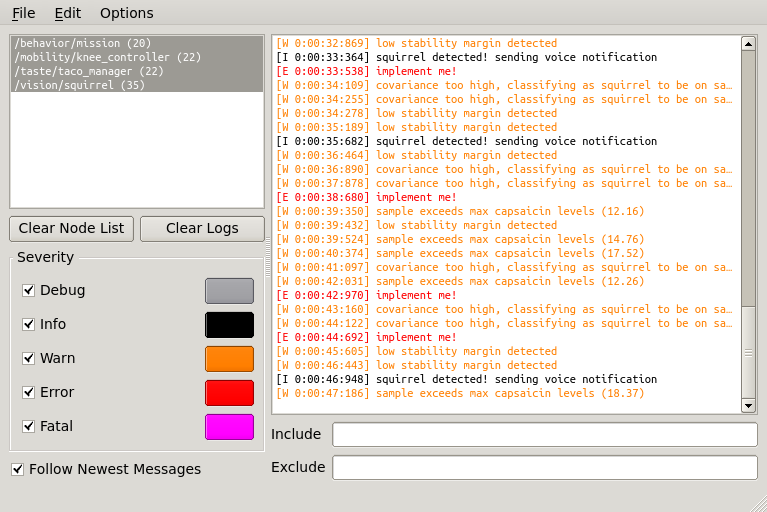
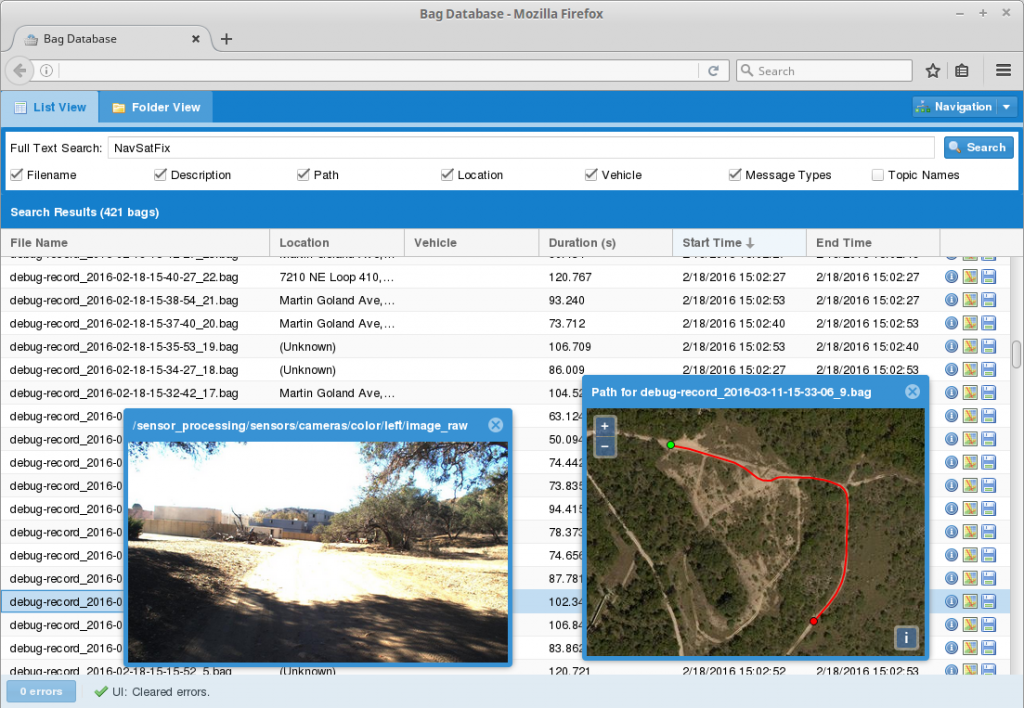
And today, it is my pleasure to introduce you Phillip J. Reed from SWRI . P.J. works at SWRI as a developer. There he has developed a bunch of very useful tools for different situations on ROS that we are going to review today here.
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to the ROS Developers that are designing the behaviour of their robots. You know how difficult it is to build a behaviour for robots that is able to provide intelligent responses to unexpected situations. You try to encode all possible situations but there is always a corner situation that scapes our planning. This episode is dedicated to you.
And today, it is my pleasure to introduce you Michael Cashmore, research associate, and Gerard Canal, post-doc, both at King’s College London.
They came here today to tell us more about how to design the behaviour of a ROS based robot using ROSplan.