Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to the people who is already thinking about the summer holidays. Going to the beach, having sun, drinking something cold… and your robot playing in the water!
And today, it is my pleasure to introduce you Nils Bore. Nils is postdoc at the DIVISION OF ROBOTICS, PERCEPTION AND LEARNING of the Royal Institute of Technology in Stockholm where he is developing underwater vehicles within the SMaRC project.
Nils is here today to tell us more about how to develop ROS-based autonomous underwater vehicles
Today, we dedicate the podcast to all those ROS developers that are having trouble visualizing their ROS data in QT windows. Too much work, too complex, too much compilation… For all of you there suffering this problem, stay tuned to today’s episode because we may have a solution for you.
And today, I’m very honoured to introduce you Wolf Vollprecht. Wolf is scientific software engineer at Quanstack in Paris. He works in his day to day with Jupyter notebooks and also, he is a lover of robotics and ROS. That is why he decided to combine the two worlds and create the jupyter-ros widgets that allow us to embed interfaces to ROS into jupyter notebooks. How cool is that?!?!
Wolf came here today to tell us more details about his jupyter-ros integration.
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to all those ROS developers that are planning to attend to ROS conferences during the summer. There are several ROS Summer Schools and conferences around, being the ROSDevCon the one that we organise at The Construct, but many others also available (I’ll put a link beneath of the podcast with all the summer schools)
And today, I’m very honoured to introduce you Xinyu Zhang. Dr Zhang is associate professor of robotics and ROS at East China Normal University as well as the director of the Intelligent Robot Laboratory. He is the founder of the China ROS Education Foundation a non-profit organization aiming at enhancing ROS (Robot Operating System) learning, training and application in China.. We came to China to talk to him about the ROS summer school that he organises every year since 2015 (this year is going to be the 5th edition), that gets many students on each edition! It is the one and only ROS summer school in Chinese, and he is here to explain us how he has managed to get such success.
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, we are going to dedicate the program to all those developers that are giving their first steps in the ROS worlds. We know it is not easy. We dedicate the episode to you. Keep pushing guys, you can make it!
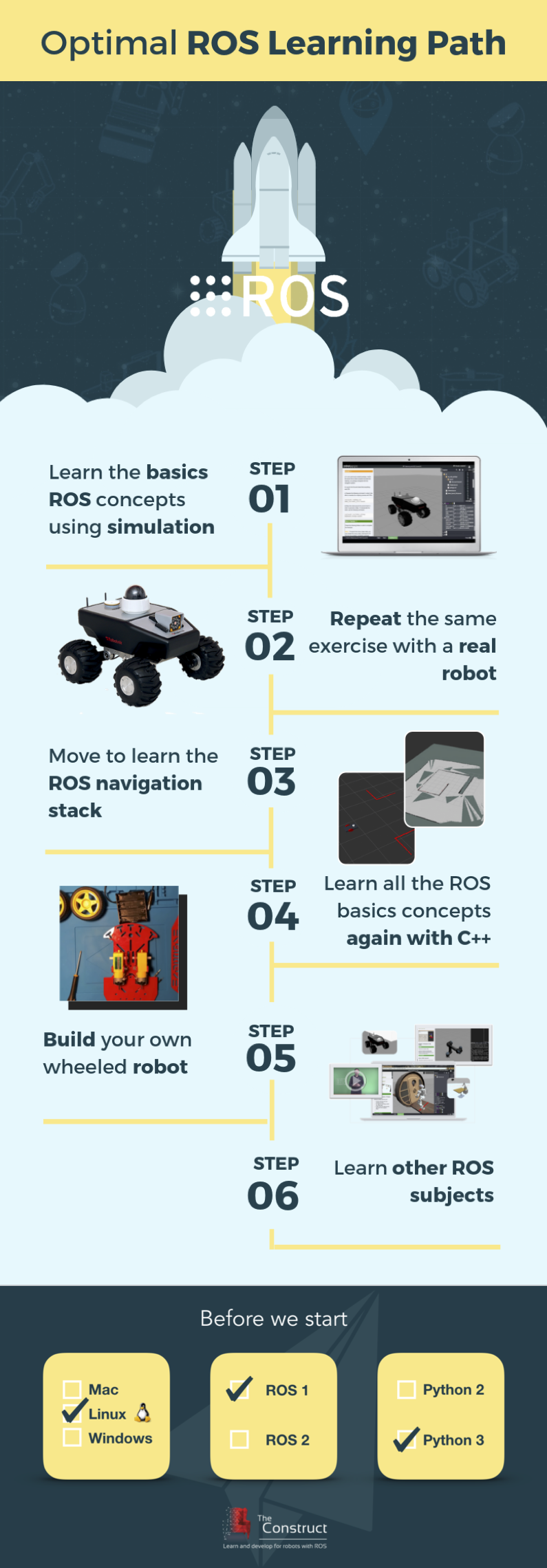
And in this episode, I’m not going to interview anybody. Instead, I’m going to provide you some a complete path to learn ROS the fastest way. I’m going to explain you how you should start learning ROS, and how you should proceed to optimize your learning and master ROS the fastests way.
Buy your ROS based robot in our friends online shop called ROS Components (we don’t get any comission for this recommendation, we just like this shop and buy our robotics components there).
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to all those ROS developers of the world. Are you creating ROS programs, building robots based on ROS, creating companies of products based in ROS? Then this podcast is dedicated to you! You are growing this amazing system that help us so much in the development of the robotics field.
And today, I’m very honoured to introduce you Tully Foote. Tully is the man behind the ROS maintenance. Of course, he is backed up with a team of ROS developers, some of which, we have already interviewed here in previous episodes. But we can say that Tully is the manager of all of them. In Spanish we would say that Tully is “el que corta el bacalao”.
Selected quote:
“There are three types of work to create a new ROS version: new development, release management and package maintenance”
Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to all those ROS developers that are in charge of the whole development structure that allows a ROS developer create, test and debug his ROS programs under a safe net. Those developers that create all the Q&A mechanisms to prevent us from breaking functionalities. You are the tougher!
And the guest of today is one of those tough guys!
We are going to interview Victor Lopez, Software engineer at Pal Robotics. Victor has been working for more than 9 years at Pal Robotics developing software for the robots, and in the last 5 years, being in charge of the whole infrastructure of development for robots of Pal Robotics.
Selected quote:
“Managing code for many different types of robots is not easy. At Pal Robotics, we had to create a software (devops) infrastructure that prevents errors from reaching the customers, for all the robots”