This episode is about learning the options you have to get some money to start your startup and what is expected you achieve with that money
In this podcast series of episodes we are going to explain how to create a robotics startup step by step.
We are going to learn how to select your co-founders, your team, how to look for investors, how to test your ideas, how to get customers, how to reach your market, how to build your product… Starting from zero, how to build a successful robotics startup.
I’m Ricardo Tellez, CEO and co-founder of The Construct startup, a robotics startup at which we deliver the best learning experience to become a ROS Developer, that is, to learn how to program robots with ROS.
Our company is already 6 years long, we are a team of 15 people working around the world. We have more than 100.000 students, and tens of Universities around the world use our online academy to provide the teaching environment to their students.
We have bootstrapped our startup, but we also (unsuccessfully) tried getting investors. We have done a few pivots and finally ended at the point that we are right now.
With all this experience, I’m going to teach you how to build your own startup. And we are going to go through the process by creating ourselves another startup, so you can see in the path how to create your own. So you are going to witness the creation of such robotics startup.
Money to Start
We have an idea for a cool robotics product and assembled a team to build it. The only thing that remains is to have some money to buy the required parts, computers, and software, or else we may need to build the product. Also, the team building needs to have some payment (or not). If you need to subcontract any service (for example, the design of a logo for the product or a promotional website), or if you need to visit some places to promote it, for all that, you will need money.
The beginning of the startup is always a difficult time because the product still has not been built, so you cannot generate any money. Hence it looks like a circle: you cannot create the product because you don’t have any money being generated, and you don’t generate any money because you don’t have a product. So how do you break that cycle?
Ideas are Worthless
If you have seen all those movies about entrepreneurs, they go to a panel of investors, present their idea, and then everybody gets excited about the idea they propose and gives them the money they need.
Nothing is farther from reality.
You are not going to get money from investors based on your idea. Ideas are worthless.
There is a common misconception about the value of ideas. I myself had this misconception. Several times, I have seen people that say, “Hey, I have a very cool idea for a startup. I tell you the idea, you implement it, and we share ownership 50-50.” I’m pretty sure that your idea is very cool, but what really matters is the implementation of the ideas. The difficult part is to bring into reality an idea. I can assure you that all of us have very cool ideas.
Do you remember the concept of Discmans? Only 24 songs on a CD. Only 24! So a friend of mine shared the idea of the MP3 Discman before the idea was for sale. However, he didn’t become a millionaire selling MP3 Discmans. Instead, it was Sony who implemented that idea (because somebody at Sony had the same idea).
My brother had the idea of Airbnb years before it existed (it was going to be called Travellissimo). I thought of a phone app for dates with locals, even before people had internet on their phones (by creating a local hotspot to communicate with people in the WiFi range). It was going to be called Ligotin.
Ideas per se are worthless. What matters is the implementation of ideas. You can get tons of good ideas. I have seen many people with very good ideas.
However, investors will not invest in your idea unless you have personal connections to important investors (because they are your friends) or you have demonstrated that you can make an idea into a million-dollar business.
Breaking the circle
If just having the idea is worth nothing, how can we break the circle of not having money to finance the initial startup stage?
One option is to run your startup as a side project. This means that you and your co-founders have jobs that pay your bills (house, food, transportation, etc.) and the required materials, travel, and so on for the startup.
At the beginning of The Construct, we each had another job that paid our bills. So we started like that while maturing the idea and building the first Minimum Viable Product (MVP).
The problem with that approach is that it gives you very little time to work on your startup. First, you have to deliver at your job, and then, when you have finished that, you have to go and work on the startup. That is exhausting!
Well, welcome to the startup world! You must also know that if you plan to have a startup for the next few years, that kind of exhaustion will be your life (whether you get financing or not, you will have to work like you never did before!).
So the problem is not that you have to work so many hours, but that very few of those hours are applied to your startup. As a result, your startup will move very slowly. If that is okay with you, your co-founders, and your idea (for example, nobody else in the world can do the same 10 times faster by putting all the effort into it), then this approach is okay.
However, I think that this is never the case in robotics. If you take too much time, somebody else will appear with the same product idea and take you out of business before you even have a minimum viable product.
At The Construct, we started this way, but after a few months of working like that, and once we published our first MVP (which was a complete disaster), we decided that we needed to do more work and move faster. So then, each of us left our jobs and started working for the company. To do that, we had to move to one of the first financing stages of any startup: getting money from fools, friends, and family.
Fools, Friends, and Family, the Three Fs
This stage means you will ask for money from all the people around you who love you and support you in whatever you do. Usually, this means investing the savings you and your co-founders have, asking for money from your close family, like parents, brothers, and lovers, and asking for money from those friends that would do whatever for you. Poor fools!
Then you use this money to build an MVP, a proof of concept that your idea will work, and by work, I don’t mean in the engineering sense (I’m almost 100% sure your idea will work in that sense, that is not the problem). The problem is that it should work in business terms if somebody is willing to pay for it and is willing to pay enough to build a sustainable business.
The chances are that your first iteration of the MVP will not work. So you will have to iterate, modify it, and try again. We will discuss this process in detail in future episodes.
So you will have to take that into account when you are planning your money and the many iterations that you will need before you hit the point where there is business.
How many iterations will you need? Nobody knows. Maybe one, maybe a hundred.
So you have to save as much as possible from that initial money that you have.
Actually, the startup life consists of searching for a sustainable business model in iterations, until you find a good spot or run out of money.
All this means that your money must be managed appropriately to achieve an MVP that shows some business opportunity.
If you reach that point, then you can go to the next point, which is a seed round for your startup from a business angel.
But before going into that, what can you do if you spend all the money and reach no point? Well, you can close your startup and apologize to all those who lend you money. Or you can search for an accelerator.
Accelerators
Accelerators are places that give startups a small amount of money to keep moving, as well as space to work and mentoring from experts to move your idea to the point of MVP faster. In exchange, they usually request a percentage of your company. The amount of money they give and the percentage they take depends on the accelerator.
One of the most famous accelerators is Y Combinator, which has accelerated companies like Dropbox, Stripe, Airbnb, Twitch, and Reddit. They invest $115K for 7% of the company.
I do not recommend accelerators unless you apply to Y combinator or something similar. Or unless you are so desperate and really believe this could fly. The reason is that you can find more accelerators than Starbucks in the last few years. There is one on every corner. And usually, they don’t provide a good service, just a space to stay and a little money. So the acceleration is almost nonexistent. It is more of a survival kit.
By acceleration, I mean a team of experts ready to guide you, spot your false assumptions and errors, and point you in a more successful direction. They basically get some part of the company for a little bit of money and free space (shared with many others).
Business Angels
Business Angels are the ones that invest a small amount of money in your startup after they see some possibilities of success in employing your MVP. They will need to see from you a practical demonstration that your product can make millions in the long run.
Business Angels are usually individuals with a lot of money who want to be part of a project they like and think can be successful. For example, Elon Musk was a Tesla Business Angel. He invested his own money in the early stages of Tesla.
Business Angels will also provide mentorship and guidance based on their contacts and experience. They are directly investing their personal money and want to have a say.
The amount of money invested may be around $50K – $200K
The idea here is to use that money to go beyond the MVP and show that there is real traction in your product – that is, that people would like to buy a lot of it. You don’t have to sell a lot, but just show that if you had enough resources, you would improve the product so much that a large market would like to buy.
Investors
At this point, investors come into the picture. They are there to help you scale your existing business into a big business, optimize the processes, grow in size, or attack adjacent markets.
One point I want to clarify is that investors are not only interested in seeing that you generate money. They could also be interested in traction, that is, that you can engage a lot of people because that usually means that at some point in the future, you must be able to convert those people into money by selling them something.
That is, for example, what happened with Google. Google lived many years with money from investors without producing any decent revenue because they engaged a lot of people (we are talking about millions of people). Then, at some point, one of the employees of Google got the idea of the Google ads system, which made them explode in terms of revenue.
In general, investors do not care very much about your business. It is just a piece in their business game. They may impose demanding conditions for the investment and treat your startup like another piece in their portfolio. This means that if they have to sacrifice it for a greater win (for them), they will. So take care with them.
Sometimes you have no other option, especially in hardware companies that need lots of money to build even something simple (robotics is expensive). But then, you have to be prepared to manage them. So that is another task for you as the founder.
Summary – General Path for Investing
The general way of working is as follows:
You get some initial money from fools, friends, and family to build some pre-idea
You use the good results from that to show to Business Angels, which will help you build the product to another level of results.
With those results, you show investors that there is success and that you need their money to scale to win millions. And they invest in you, several rounds.
Bootstrapping
Another option is to bootstrap your company. This means focusing on generating revenue with your product from the beginning, then using that money to pay your salaries and make your startup grow. This has its advantages and its drawbacks.
Advantages: you don’t dedicate time to get the money, so you will not owe somebody else. Instead, you dedicate your time to building the business. You don’t have to deal with investors that do not care about your business. You are basically free.
Disadvantages: you will grow slower. You are in danger that another company builds the same product as you faster because they have more resources.
Bootstrapping is the method that we used at The Construct. However, with bootstrapping, you must always fight to get enough customers to pay the company’s expenses and grow.
Conclusion
The main point you should take home is that no investors will invest in your idea. Instead, they will invest in some early implementation of your idea that has shown potential in one way or another. Because of that, starting a startup is difficult. You need to cut all expenses to the maximum and ask for money from the people close to you. Then use that money with all the care of the world to demonstrate the
The goal with that money is not to build the business but to demonstrate to investors that your idea has real potential to succeed. And success here means winning in a market the size of billions of dollars.
In the next episode, we will talk about the methodology of building the MVP that will validate your idea and lead you to the next phase.
Subscribe to the podcast using any of the following methods
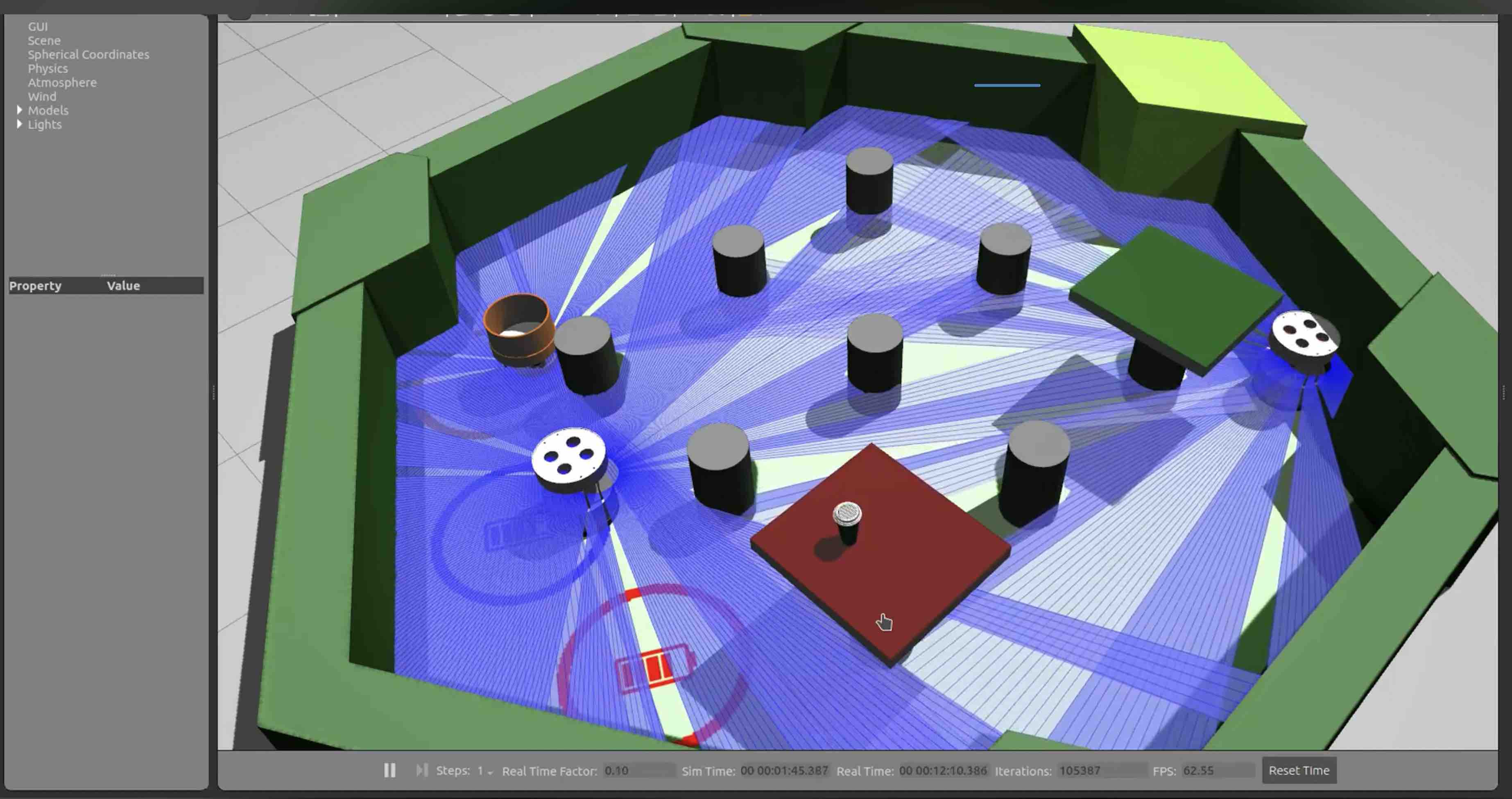
I would like to dedicate this episode to people that test their code in simulation prior to go to the real robot. That is the way guys. If you don’t test first on the simulation, you can break the robot or harm somebody with your untested code. So the procedure is always, test on simulation until it works there. Then test on the real robot. I know, we all want to test directly on the robot because is cooler, but, we don’t neither like to do unit tests but we do them, right?!?!? So…
Today we are going to learn how we can use amazing Unity powered simulations with ROS controllers.
Want to learn from the best ROS Developers of the world?
Then you cannot miss the 4th ROS Developers Day 2021, a full day of ROS practice delivered by the best ROS programmers of the world.
The conference is completely practical. 12 hours full of ROS practice from the comfort of your home. Check it out here.
Now let me introduce you Sarah Gibson, Senior Engineering Manager, Robotics | Unity Technologies. She is going to talk with me about using Unity in robotics development, and specially in using ROS and Unity to build ROS based robot simulations.
Let me introduce you Allison Thackston one of the engineers developing some parts of Robonaut. Her ROS code was running out on space! Today she is here to talk about her experience shipping code to Space.
Want to be the one creating the robots that will go to Mars?!?
Then, start by taking our ROS learning path for beginners.
But before going into that, let me remind you about our ROS online academy. Yes, at the Construct we have created an online academy named The Robot Ignite Academy which contains a ROS learning path for beginners. The path is composed by:
This episode is about understanding why you can’t build your startup alone, and some criteria to properly select your co-founders.
In this podcast series of episodes we are going to explain how to create a robotics startup step by step.
We are going to learn how to select your co-founders, your team, how to look for investors, how to test your ideas, how to get customers, how to reach your market, how to build your product… Starting from zero, how to build a successful robotics startup.
I’m Ricardo Tellez, CEO and co-founder of The Construct startup, a robotics startup at which we deliver the best learning experience to become a ROS Developer, that is, to learn how to program robots with ROS.
Our company is already 6 years long, we are a team of 15 people working around the world. We have more than 100.000 students, and tens of Universities around the world use our online academy to provide the teaching environment to their students.
We have bootstrapped our startup, but we also (unsuccessfully) tried getting investors. We have done a few pivots and finally ended at the point that we are right now.
With all this experience, I’m going to teach you how to build your own startup. And we are going to go through the process by creating ourselves another startup, so you can see in the path how to create your own. So you are going to witness the creation of such robotics startup.
Get Your Team Tight
To create your startup, you need three things:
An idea or the product
A team to realize your idea
A small amount of money to start implementation
We covered this first point in Episode 1. Episode 2 deals with the second point. Episode 3 will deal with getting the money to start.
3 reasons that Startups Fail
No market need. That was covered in Episode 1 and will be addressed in more detail in future episodes.
You ran out of cash. This Is another version of the first problem – no market need.
Not the right team. Yeah!
You will need a team that helps and supports you. You cannot do the startup by yourself. I understand how tempting is to do the startup by yourself, especially for engineers like us who want to work on our project and forget about the rest of the world.
You Cannot Do the Startup by Yourself
Thinking about doing the startup by yourself is a recipe for disaster, for several reasons:
You cannot handle all that is required. Again, I know how you feel about that because I also felt that. We are engineers, after all. I understand you, my friend. However, you need to be realistic if you want your startup to succeed. And here is the reality: you cannot handle everything required to create the first prototype. Yes, I know you believe you can, but you cannot. I’m not telling you that, given an infinite amount of time and resources, you couldn’t do it. I’m not telling you that. I know you are intelligent enough to do it, but not in the amount of time required to have a good product ready to be sold. It doesn’t matter if it is software or hardware. The large number of tasks that you will need to do is so big that the amount of time required will increase, and you will be unable to deliver.
You need other people to tell you that your idea is stupid. If you are on your own, it is more likely that you will think that all your ideas are great and start chasing all of them. So you need somebody with other opinions to act as a filter.
You are not giving the appearance of professionalism. It looks like you are just doing your hobby. If you need investors later, they will likely not take you seriously because solopreneurs don’t look serious. Instead, they look like they are just playing. They will not trust that you can keep building the product to make them rich. Also, a single person indicates that you have problems managing other people, so this problem will appear later when you need to scale your business.
You are not preparing yourself for what is coming. This is by far the most important point. If you want to build a startup, you will need a team in the short term, like it or not. You will need to learn to work with other people, synchronize with them, negotiate, make arrangements, solve conflicts, make people happy on the job, and all that. Yes, I know you are thinking that you are not building a startup to do all that. Instead, you are building a startup to put a cool product in the world. Yes, that is right. But to do that, you need to do all the rest.
It is very likely that as an engineer, you don’t have those skills now. So now is the moment to start practicing. You are going to need this if you want to create a startup that grows. So you better start practicing now with a small team and then scale your learning as your company scales.
If you really hate to deal with people, manage people, make arrangements. If you really think that the only thing you want people for is to provide commands that they must execute, then think again about creating the startup. Your team is the most important part of the startup because they are what makes the delivery possible. We’ll talk in future episodes about how to hire and manage teams, and how to fire.
If you really don’t like to lead people, then don’t start the startup. You cannot manage it by yourself. You will need a team. Even if small right now, you will need some team. Then if things go as planned, you will need to hire more people.
Maybe you are thinking about going small now, but you will hire others to do the management as soon as you succeed. That is okay if you want to be managed by somebody else.
Leading a team is the most difficult job. It is more difficult than creating intelligent robots. I personally do not like to do that job, but for some reason, I’m not bad at it. Managing is one of the parts of my job that I don’t like, but I do it extremely carefully because I think it is essential to the success of our company.
Start With Co-founders
When talking about a team, I’m talking about co-founders. That means that those are the people that will create the startup with you, so you share the ownership of the company. That is different from people who work at the company for a salary. Co-founders are co-owners; workers are not. Therefore, their privileges and salaries are different (usually lower salaries for co-founders). We’ll cover how much to pay to co-founders and workers in the next episode, but basically, co-founders should be able to work for free (because they own part of the company). If you have money to spend now, you may be interested in hiring people with no ownership in the company. In that case, you should pay them a salary.
I assume you have no money to spend on salaries, so you would like to find co-founders to take the risk with you.
So what is the minimum number of co-founders you can start with?
You need to start with a minimal team. Remember that at this time, you are still not generating any money, so that you will be using your savings or taking out loans. You also do not know if the market will accept your product, so it is very likely that you will need to do a few rounds of testing before getting a product that starts generating revenue. If you are thinking about getting an investor, no investor will invest in your idea without a demonstration that your product is interesting for the market, so do not count on that money yet. You need to prove first that your product has a market. So you will be relying on your savings or loans from your family and friends (we’ll discuss this in Episode 3).
So you need a minimum amount of people. However, do not start with too many people; otherwise, your funds will deplete quickly. Also, there could be a lot of disagreements that break the team.
What is the minimum number of people necessary to get your startup running?
I think the minimum is two people: one for getting the engineering work done and another for running the business. That is a minimum. However, if the product is very complex, you may need more engineers to build the product. For example, at The Construct, we started with one person on the business side (myself, no idea how to do it at that time) and the rest of the team developing the product (three people). That is a lot. I do not recommend so many people, but in our case, it was a success. The more people on your team, the more difficult it is to take decisions.
I think that two is the minimum. Definitely, in most cases, I don’t think you need more than one business person because the goal of the startup is to discover if your product has any traction and, if not, design the proper experiments to figure out how to change it to achieve traction.
That doesn’t mean that people will not do overlapping work. On the contrary, it is very likely that everybody will have to do marketing tasks, show demos to clients, call clients, etc.
When you select the people for your team, you will be tempted to ask your friends or family for that. That is a little bit dangerous. Being friends is one thing. Working together to make a startup succeed is another. It is not even close to working together in a third-party job.
The startup is your baby and your team’s baby. But your friends’ management style for the baby may be different to yours, especially concerning your work ethic. Startups require a lot of work. You can disagree on using one technology or another, but that will not break the team. But you cannot disagree on your company’s work ethic.
Basically, work ethics means how hard you are going to work. Any successful startup requires massive amounts of work. Expect that.
Personally, I prefer the work ethic of Elon Musk (he works a lot, an insane number of hours). But other people think that is not a proper way because you need more rest. That is okay. Each one has his vision. The problem is when you mix those together. If your partner wants the weekends free for the family, but you don’t (or vice versa), you will have a clash of opinions on a very basic point.
In startups, you will make so many errors that, in my opinion, the best strategy is to work more and more to compensate for the mistakes quickly. But, unfortunately, that is why the person who works more will feel that the other is not doing their part. This is the beginning of very deep discussions that are difficult to solve because you cannot convince the other part of your working style.
Yes, you will have to learn to work smarter, but that will not reduce the number of hours of work but include more things to do. And you need to!
In conclusion, do not select as a co-founder somebody because you like him. You may end up disliking him after a few months of pressure. Do not select that friend of yours with whom you had the most laughs when he always left studying to the last day or was copying on the exams and feels proud (unless you also did the same). Don’t select the one that thinks weekends are for resting (unless you feel the same). If you have different work ethics, you will have a lot of disagreements. It will be very difficult to handle those if you are friends or family because you cannot have a serious discussion with them without affecting your personal life.
How Do You Distribute the Jobs?
It is good that you have somebody who has studied business or has some experience on the team. If not, do not worry that much. Select the person, and that person will have to start in an express process to learn about it. This is one of the aspects you will have to master in creating a startup: you will have to be learning continuously at high speed. There will be so many things you don’t know how to do, and you will have to dedicate a lot of time to learning. We will dedicate one episode only to this.
You do not have to be the CEO if you don’t like that position. Usually, engineers prefer to act as CTO, the company’s chief technical officer. The CEO decides the direction of the company, and the CTO determines how to reach that direction technically. However, at this point in the startup, those titles don’t matter because it is too early to define well-separated works. After all, everyone will be helping.
The more skills they have, the better, but that is not mandatory. It is more important that they have the attitude to learn fast and jump into problems. The whole team will need to learn a lot quickly throughout the process, so the important skill is learning fast and continuously, and the attitude of willingness to do it.
Hands-on Exercises
How do we apply this to our robotic bartender startup? In this case, there are two people: myself as the business director and a young engineer as the robot and software developer. We know this is enough for this stage, at least until we do the first test and assert that the robot is useful and somebody may buy it.
So basically, you must get a few people to develop the product and at least one person to investigate how this product can be sold. Both teams will work very closely and sometimes overlap jobs. You do not need to assign any titles right now, like CEO or CTO. This is just taking time and complicating your project. You will think about that once you get an investment or reach break even.
In Episode 3, we will discuss how to get money and compensate the team for their work.
Subscribe to the podcast using any of the following methods
In this episode, Ricardo is the one interviewed. Sina Pourghodrat is a Surgical Robotics Software Engineer who on his spare time runs a Youtube channel about Robotics and how to become a roboticist.
He wanted to interview Ricardo in order to introduce ROS to his audience, and let them know of the importance of it when building robots.
In this special ROS Developers Podcast series, we will explain how to build a robotics startup. This series is dedicated to all that are thinking about creating a robotics startup, either about hardware or software, but everything related to robotics.
Step by step, we’ll explain how to create that robotics startup with real-world examples, including:
How to select your co-founders and team
How to look for investors
How to test your ideas
How to get customers
How to reach your market
How to build your product
And everything starts from zero. So we’ll cover all the steps to building a successful startup.
Who I Am
I’m Ricardo Téllez, CEO and co-founder of The Construct, a robotics startup that delivers the best learning for aspiring ROS developers on how to program robots with ROS. Our company is six years long. We are a team of 15 people working around the world. We have worked with more than 200,000 students and dozens of universities around the world. They use our online academy to provide a teaching environment for their students. We have bootstrapped our startup. That means that we haven’t had any business investors. We tried the ‘investors thing,’ but for several reasons, we chose not to go ahead with the investment. I will explain in later episodes.
With our students in our ROS classes
With all this experience, I will teach you how to build a startup. And we will demonstrate the process by creating another startup so that you can see the path to creating your own. So, you are going to witness the creation of a robotics startup.
You can take this as advice, and whatever you consider incorrect or don’t like, just discard it. That’s okay.
Then we are going to go.
Why Do Robotics Startups Fail?
Unfortunately, most startups fail. And, it is more common for robotics startups to fail.
There are several reasons that robotics startups fail (I will add a few links here on the podcast show notes where there are some posts that analyze this situation). But I would like to mention that one of the most common reasons robotics startups fail is because we are engineers.
We fall in love with our robotics idea that nobody wants to buy. We look for investors. We add more time and more money. But, in the end, we have a robotics product that nobody wants to buy, either because it is expensive or, more often, because it doesn’t solve a real-world problem. Instead, it is a robot that interests engineers but is not interesting for the market – for the consumer.
We often forget that the goal of a startup must always be to create a business, not create a robotics product. Okay, the business must be about robots, but it has to solve a real problem. Coolness doesn’t matter. To have a successful robotics startup, the business is what matters. Otherwise, we run out of money and die.
Examples of failures include the Jibo robot, the COZMO robot, and the BAXTER robot. All of them are cool robots, but nobody wants to buy them! The companies raised millions of dollars. They failed because they ran out of money because they didn’t have a sustainable business model.
Cozmo and Jibo
Baxter robot
In the world of startups, many people are interested in generating round after round of investment, until they die. In this podcast, we will not promote the search for investors for our crazy idea. We are not interested in having a fun ride until the money is over. Instead, we are interested in building a real business. We want to create a business that produces money, as much as possible. Or, at least enough to sustain the team and research lines.
We may need investors at some point. But, our goal is not to get as many investors as possible and then have the business die. Instead, our goal is to get the required investment, if any, and then build a business as scalable and profitable as possible. Of course, we aim at a multimillion value company, but let’s not go so fast that we lose control and crash.
Let’s start, step by step.
Decide On the Idea
First, decide on the business idea. This is what we are going to analyze in Episode 1. We will follow three steps:
Step 1 – Decide which problem to solve
In this Step 1, we will decide what problem we will solve with our startup. That’s always how it must start – by trying to solve a real-world problem. The best way to identify a problem is to look for a problem you experience and where robotics can provide a solution, with the current technology. It could be a problem in the robotics field (for example, a new communication bus for transferring large amounts of data), or a problem in the real world that can benefit from a robotics solution.
For example, The Construct identified a problem with learning about ROS. The ROS official Wiki tutorials are amazing. I personally learned by using those Wiki tutorials. But we wanted to speed up the process of learning ROS, and go faster than what the Wiki provided. In response to this problem, we built The Construct. The Construct provides courses in our academy that are based on online simulations. So you can get the meaning of the different parts of ROS very fast and very quick, because you are practicing. So this is a problem in robotics where we provided a solution. But there are other problems in the world that can be solved by using robotics.
Here have two considerations:
Don’t try to put robots where they are not needed. Just because you work on robotics doesn’t mean you need a robotics solution. For example, robotics companies have been trying to put robots in supermarkets, so the robot can move around the shelves and make the inventory. Well, a couple of months ago, Walmart canceled their project with Bossa Nova Robotics, which included inventory robots, after finding that by doing the job with humans, the process was simpler and cheaper. So that’s my first consideration for deciding about a problem to solve. Don’t try to put robots where they are not needed.
Don’t get caught up in the hype. Be grounded about what you are going to build. Don’t promise things that are cold, and you know are not possible. You are creating hype that will not deliver.
Step 2 – Decide on hardware or software
You cannot decide to attack both things. Decide on hardware and software, unless you are rich and have a well-trained team. Even like that, it is still a call for failure.
Deciding to work on hardware means that you will develop the hardware that somebody else will use for a purpose. Somebody else will put the software on it (apart from the basic software drivers that will ship with the product). For example, you decide to build a quadruped like Boston Dynamics. Concentrate on building the best quadruped and assume that somebody else will use it for a very concrete application by putting the software on it. Or, assume that somebody else has already written the code for an application, and you only need to include it in your product by tweaking it. For example, you need the ROS navigation stack for your hardware product. That’s also okay because you are basically developing the hardware and the drivers for that, but then you are taking software that already exists and putting it in your product. You are making minor modifications, but you are not developing the software. You are not maintaining that software. Do you see the difference? I hope yes.
Boston Dynamics quadruped
If you believe it is absolutely necessary to build the software for the hardware you create because otherwise, your product will not work. In that case, you have a huge problem. If this is your first startup, I would not recommend it. If you still want to go in that direction, partner with a software company to develop that for you. For example, one success story is that IBM partnered with Microsoft to provide an operating system for their PCs. However, Microsoft didn’t do that for their phone. Instead, they focused on both the phone’s hardware and the operating system. In the end, they failed, and no one remembers that phone.
If you decide to concentrate on the software side, you may be creating an application that runs on multiple robots that already exist out there. Or, another option is to ship your software with an existing robot. You sell the robot with your software.
Deciding on one or the other is not easy. Each one has its advantages and drawbacks.
Software is faster to develop and requires less investment. It is easy to scale and distribute. It is easier to provide value to a customer with software. On the other hand, almost nobody wants to pay for software. Everybody wants software applications for free. They see the value, but they think it should be free. That’s the world that we are in. To make a real business from that is going to be very difficult.
Everybody sees the value of hardware, so they have no problem paying for it. However, the robotic product must provide real value. It requires a lot of money, and it’s a slow process to develop hardware. It takes a long time to do every cycle, and if you make some mistake and only notice it weeks after you were done, printed, and built, then you have to go back all those weeks. So it’s harder to develop hardware.
As an example of the difference in public perception between software versus hardware, I would like to share my experience selling online courses, which is similar to selling software. We get calls from people saying they have bought a 10.000€ robot and want to learn to program it. However, when I explained that the courses were 39€, they didn’t want to pay. They are willing to pay for the 10.000€ hardware, but they think 39€ for a lesson is too much. Crazy world!
Finally, you must use ROS. Yes, or yes? ROS will save you time, so much more than you can imagine. Please, please do not develop your own framework. Instead, just ROSify your product. You will save countless months.
But I don’t know ROS! I heard this from the back of the room. Then, quickly go to our ROS Intensive Training and learn it. We provide the fastest method to learn ROS, including how to apply it to real robots. Learn ROS right now. It is your best investment of time.
Please, please, please do not try to build your own framework. It’s not going to work, and it’s too much work. The Jibo and the Cozmo did it (and I think the Baxter also, even if later they build a ROS mode), and you know how they ended.
Step 3 – Narrow the solution as much as possible
Now that you have your idea, reduce the scope. If you are like other passionate engineers, you are already thinking about all the marvelous things that your robotic product will do. You need to cut them by 90%. Just leave the essential 10%. You need to think about the very core of your application.
The reason is that you need to validate your idea as soon as possible. To validate your idea means testing to ensure that somebody is willing to pay for your product. And the only way to do that is to put your product on the market, as soon as possible, and convince people to buy it. Nothing more. And, you need to move fast; otherwise, you will spend all your money before you have something to sell. Also, you don’t know if your solution is required by the public. So, narrow the idea to the very core, the one that allows you to show the basic functionality. That is what you will build to show to the public and see their reaction.
Recap
See below a summary of the three steps:
First, decide which problem to solve without trying to put robots where they are not needed, and creating hype.
Second, decide that either you are working on producing a hardware or software solution.
Last, narrow that solution as much as possible.
I know that the three steps were not what you wanted to hear. If you are like us, your idea is to build a master robot that will understand the human language under a lot of traffic noise, grasp anything from any place, and clean the house while moving the furniture. I do not mean you cannot do that, in the future. But now, start small. So cut, cut, cut. And then cut more! Cut your idea until you have the bare bones.
A Real Example: Our Startup Idea
Let’s decide on the startup that we will build during this podcast series:
Which problem will we attempt to solve?
I hate waiting in the queue for my coffee, especially when I decide to stay at the coffee shop table. So I want a robot that brings the coffee to the table directly from the barista. The idea is that we can order coffee from the table using a web app. The order goes to the barista, who prepares the coffee and provides it to a robot that then delivers the coffee to the table.
Hardware or software?
We will concentrate on the software. We will use an existing mobile base that provides all the hardware functionality. We may need to build some covers for our own look for the robot, but that should be the only hardware thing that we do. The rest, we will dedicate to configuring the ROS packages necessary for it, providing the usage interface for the barista and the coffee shop customers.
Narrow the problem
The robot will only deliver coffee in standard cups with a lid. It is not possible to serve cups with no lid. No cakes, no sandwiches, no cans. Only coffees, teas, and frappuccinos are in standard cups with a lid. Of course, the robot doesn’t have any arm that manipulates the beverages. It only has the wholes where the barista will put the beverages and from where the customers will manually take the beverages. The robot doesn’t have any sensor that detects when the cups have been taken from it. Simpler, it waits for a fixed amount of time and then returns to the barista. The robot doesn’t auto-charge. So, when the battery is gone, it is gone.
As you can see, we are trying to build something for a very specific problem that we suffer and that we know, as roboticists, can have a robotic solution. We also restrict the problem to a very narrow case, and even like that, we’ll have a lot of problems.
As you will see in future episodes, this business is the point of departure for the startup. That doesn’t mean that we will end up with a company building those robots. Most likely not. This means that we will try this business and see how it works and quickly adapt our ideas if we see that it doesn’t work. So, don’t get too attached to your original startup idea because it is 80% sure to change. But that is the subject of another episode.
Also, you can find contact details in the show notes. Then with nothing else to say, I’ll see you in the next episode with a new lesson from the experts. Until then, keep pushing your ROS learning!