ROS (Robot Operating System) is a de facto standard for Robotics. In order to program Robots, simulation of Real world systems is very important to test and debug the systems. MoveIt is most commonly used Motion Planning Library for Robotic Arms or Manipulators. In this tutorial we will create MoveIt Package for simple robotic arm.
Opening the ROSJect:
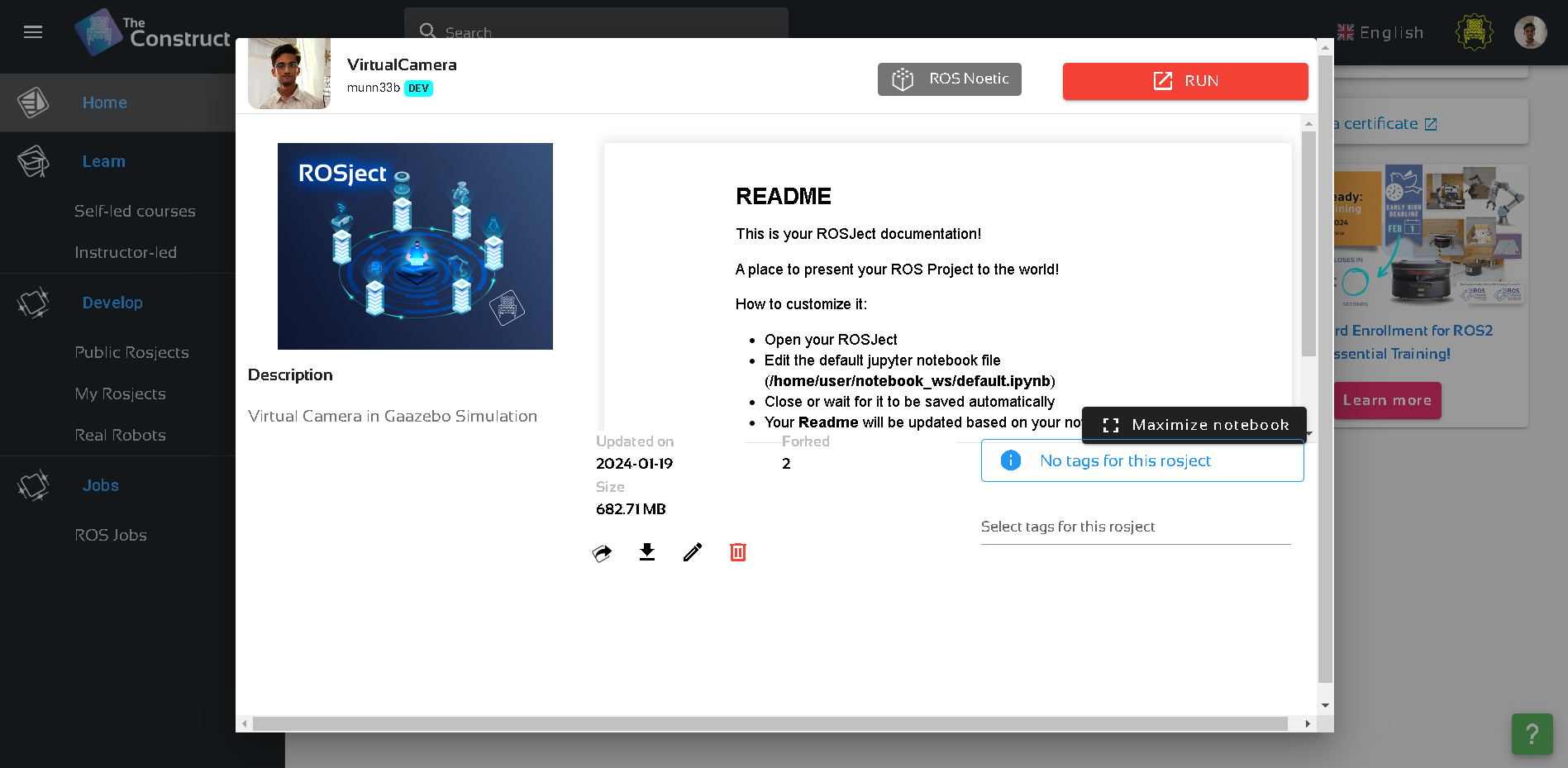
To follow along the post, we need to have ROS2 installed in our system. To make things easier, we have created ROSJect to follow along: https://app.theconstruct.ai/l/5fcb7f9e/.
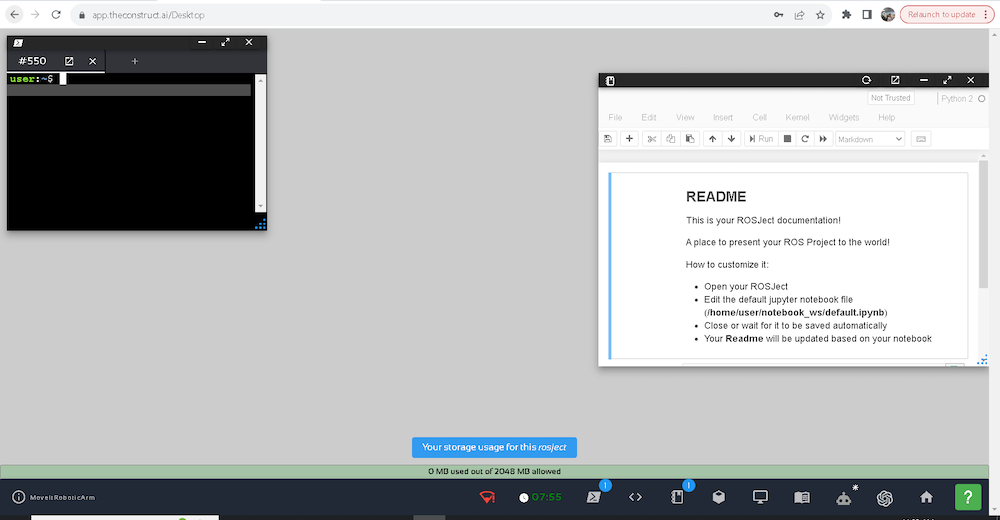
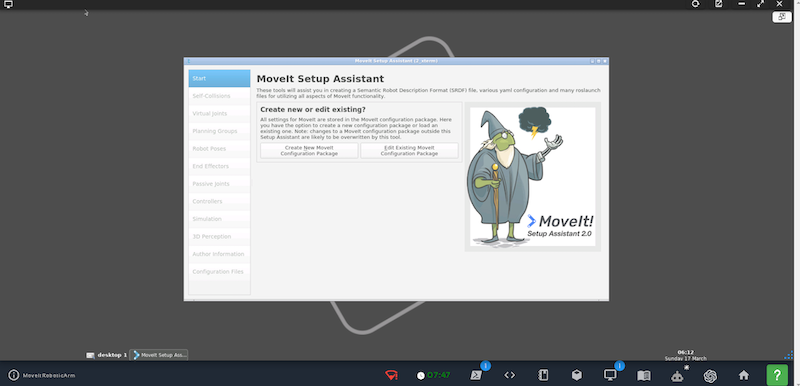
Next, fort the ROSJect and click Run. You will be presented with the interface like following.
In terminal, go to your workspace. by running the following command
cd catkin_ws/src
and then clone the resource Robotic arm Package from Github. by typing
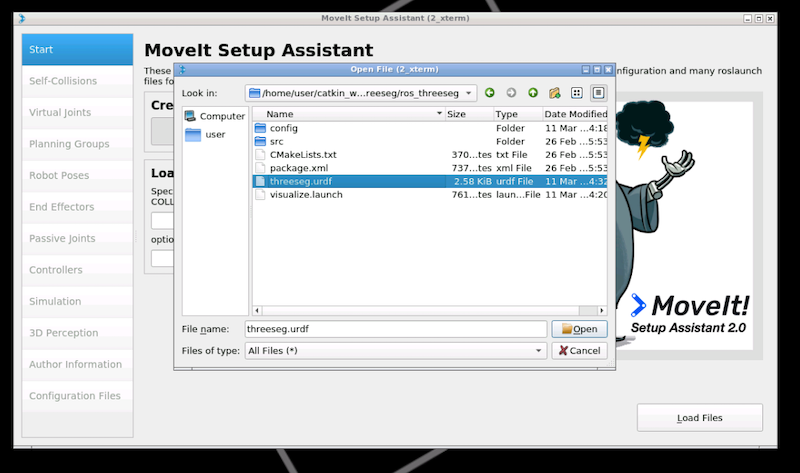
Click on “Create New MoveIt Configuration Package”. and select URDF File for package we have cloned in our ROS Workspace.
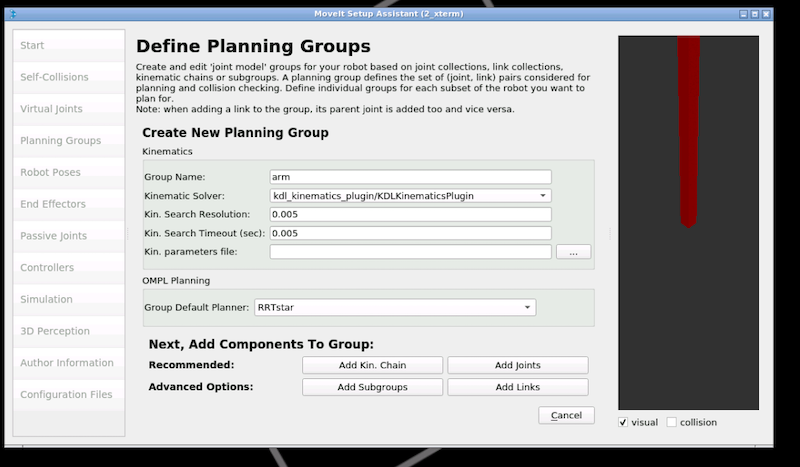
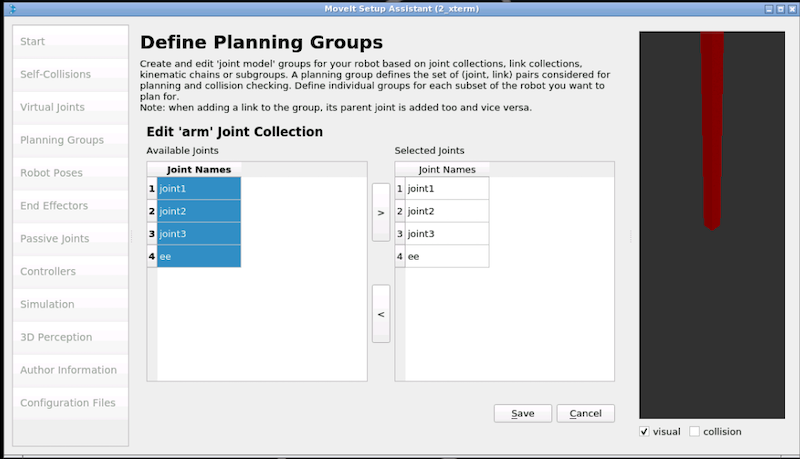
Next, go to “Planning Groups” and create new Group “Add Group”, and write name of group, kinematic solver and Group Default planner as follows
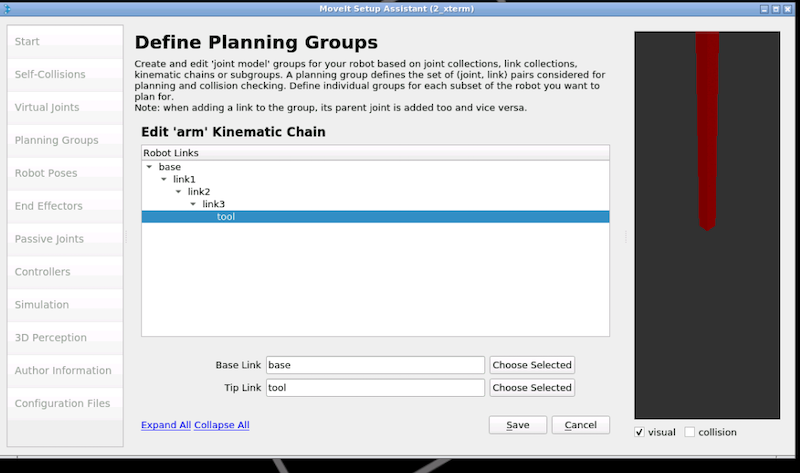
Then Create new Kinematic Chain, as follows
Then select joints for this group
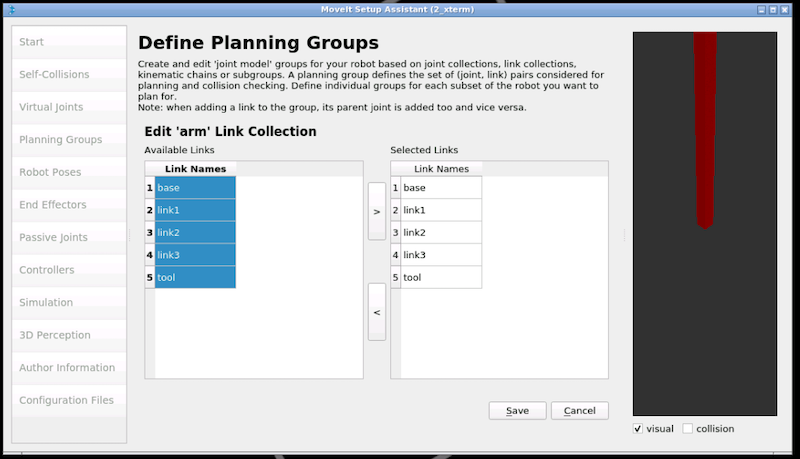
and after that select Links for this Planning Group
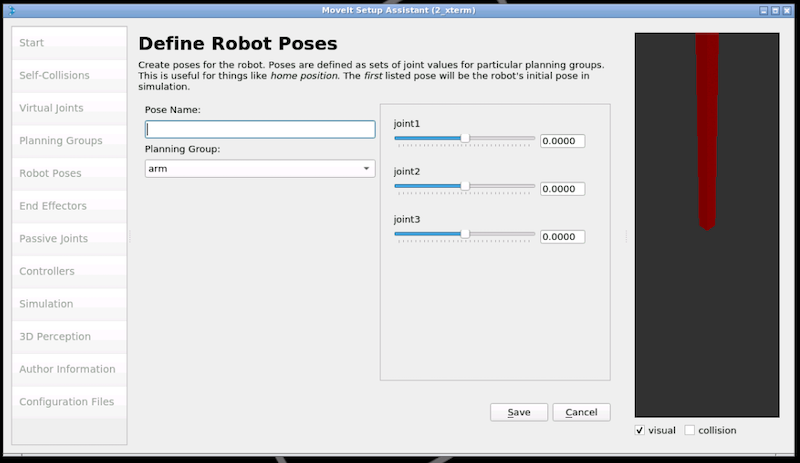
After going through this step, we can configure various poses for Robotic Arm.
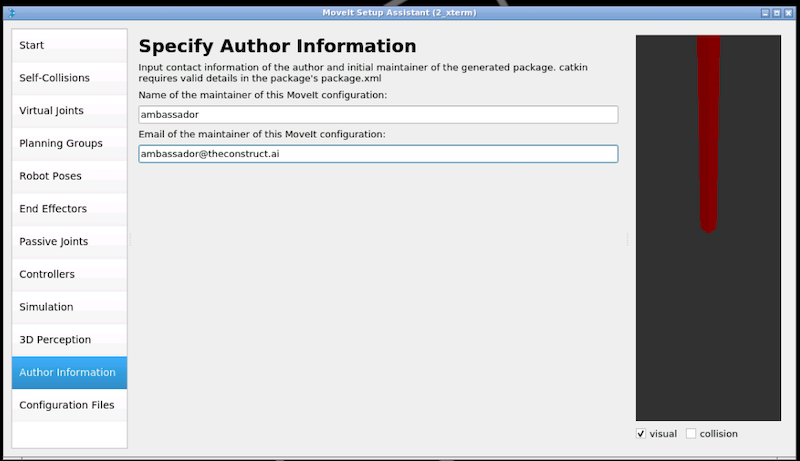
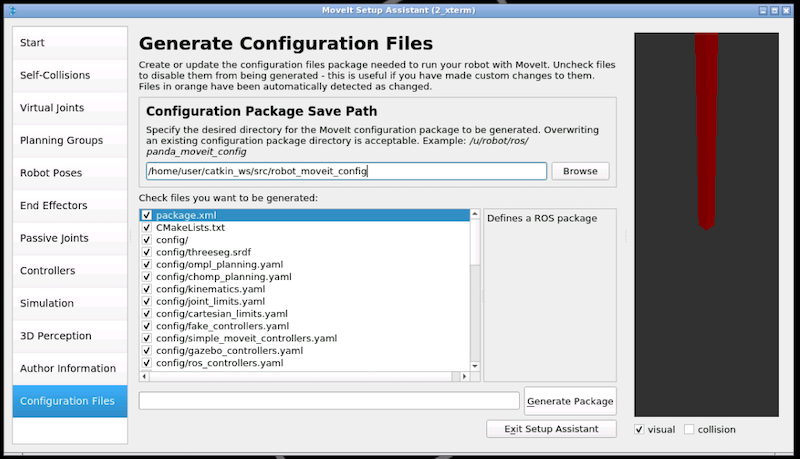
Next fill out some author information,
and generate the MoveIt Package.
Final Thoughts
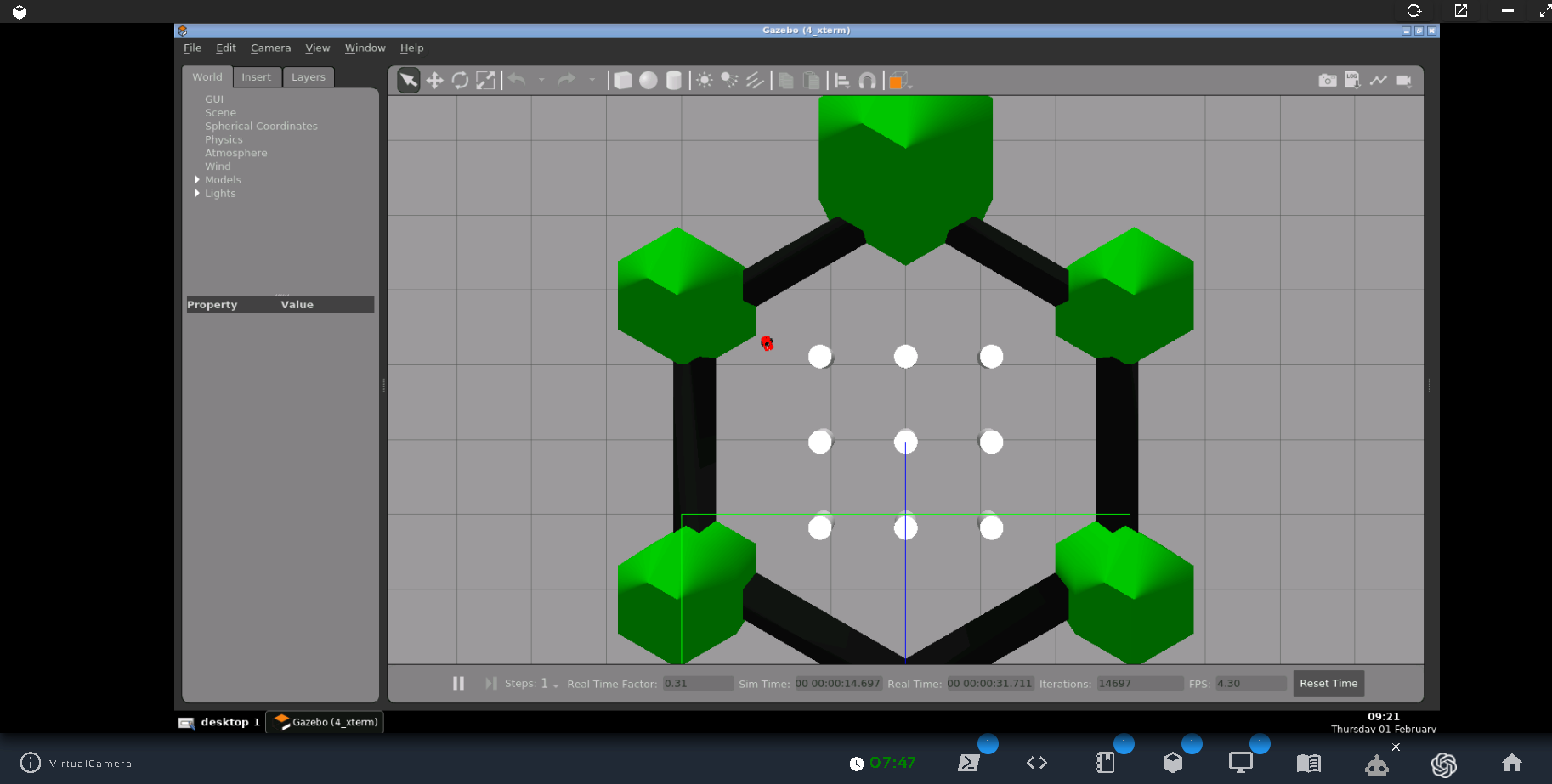
Now that we have generated the MoveIt package for our robotic arm, next we will add custom controllers and hardware interfaces for simulating this in Gazebo. MoveIt is very practically useful tool for robotic arms as it can be used for motion planning, trajectory generation and solving Inverse Kinematics for Robotic arms.
کمپیوٹر ویژن روبوٹکس میں ایک اہم حصہ ہے اور روبوٹکس میں کمپیوٹر ویژن الگورتھم کو لاگو کرنے اور جانچنے کے لیے ہمیں اپنے روبوٹ میں ویژن سینسرز (RGB اور RGB-D کیمروں) کو ضم کرنے کی ضرورت ہے۔ اس پوسٹ میں ہم مصنوعی ماحول کو دیکھنے کے لیے Gazebo Simulation میں اپنے روبوٹ میں مصنوعی RGB-D کیمرہ شامل کرنا سیکھیں گے۔
سمولیشن روبوٹک سسٹمز ٹیسٹنگ میں ایک مربوط حصہ ہے، روبوٹکس سسٹمز کے تمام پہلوؤں کو صحیح طریقے سے جانچنے کے لیے، تمام اجزاء کو سمولیشن میں شامل کیا جانا چاہیے (بشمول سینسر، ایکچویٹرز وغیرہ)۔ Gazebo، روبوٹکس میں بڑے پیمانے پر استعمال ہونے والا سمولیشن سافٹ ویئر ہونے کے ناطے، اس میں بنائے گئے زیادہ تر سینسرز کے لیے تعاون حاصل ہے۔
ROS Inside!
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it, print it, and attach it to your robot. It is really free. Find it in the link below:
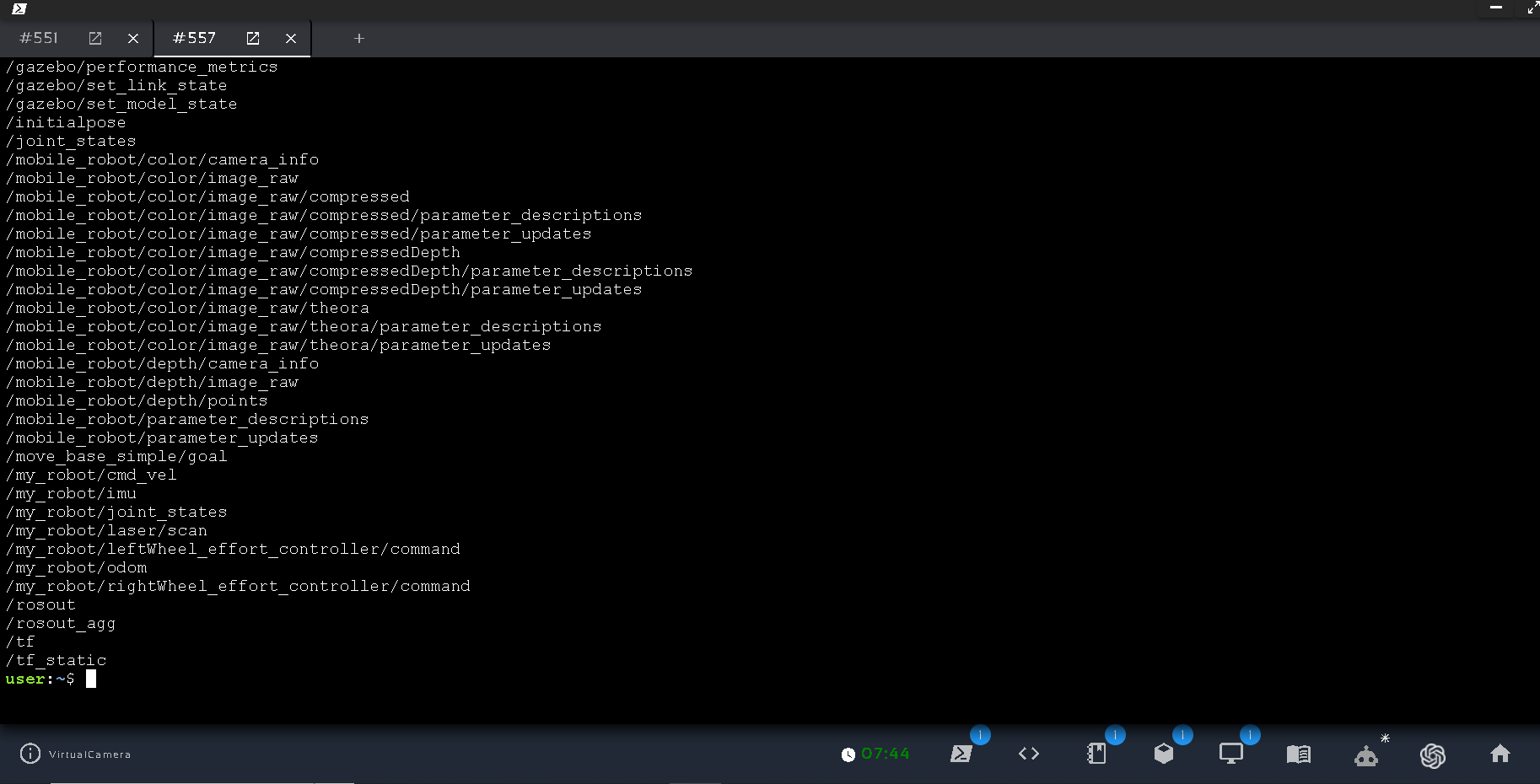
ہم RViz میں پوائنٹ کلاؤڈ ڈیٹا کو بھی دیکھ سکتے ہیں۔ ٹرمینل چلائیں اور ٹائپ کریں:
rosrun rviz rviz
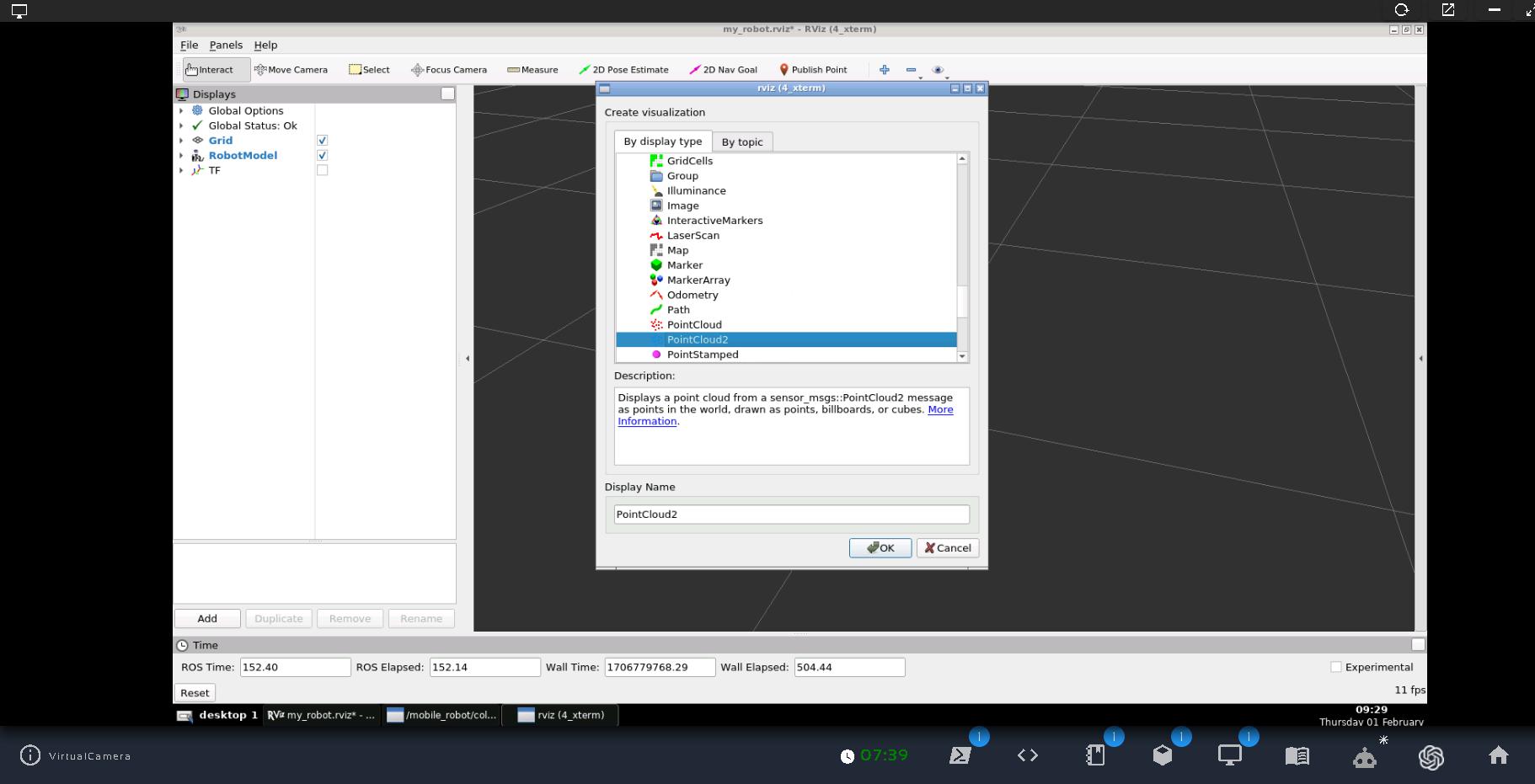
یہ RViz کے ساتھ نئے گرافیکل ٹولز ونڈو کو کھولے گا۔ “شامل کریں” پر کلک کریں اور “پوائنٹ کلاؤڈ 2” فیلڈ شامل کریں۔
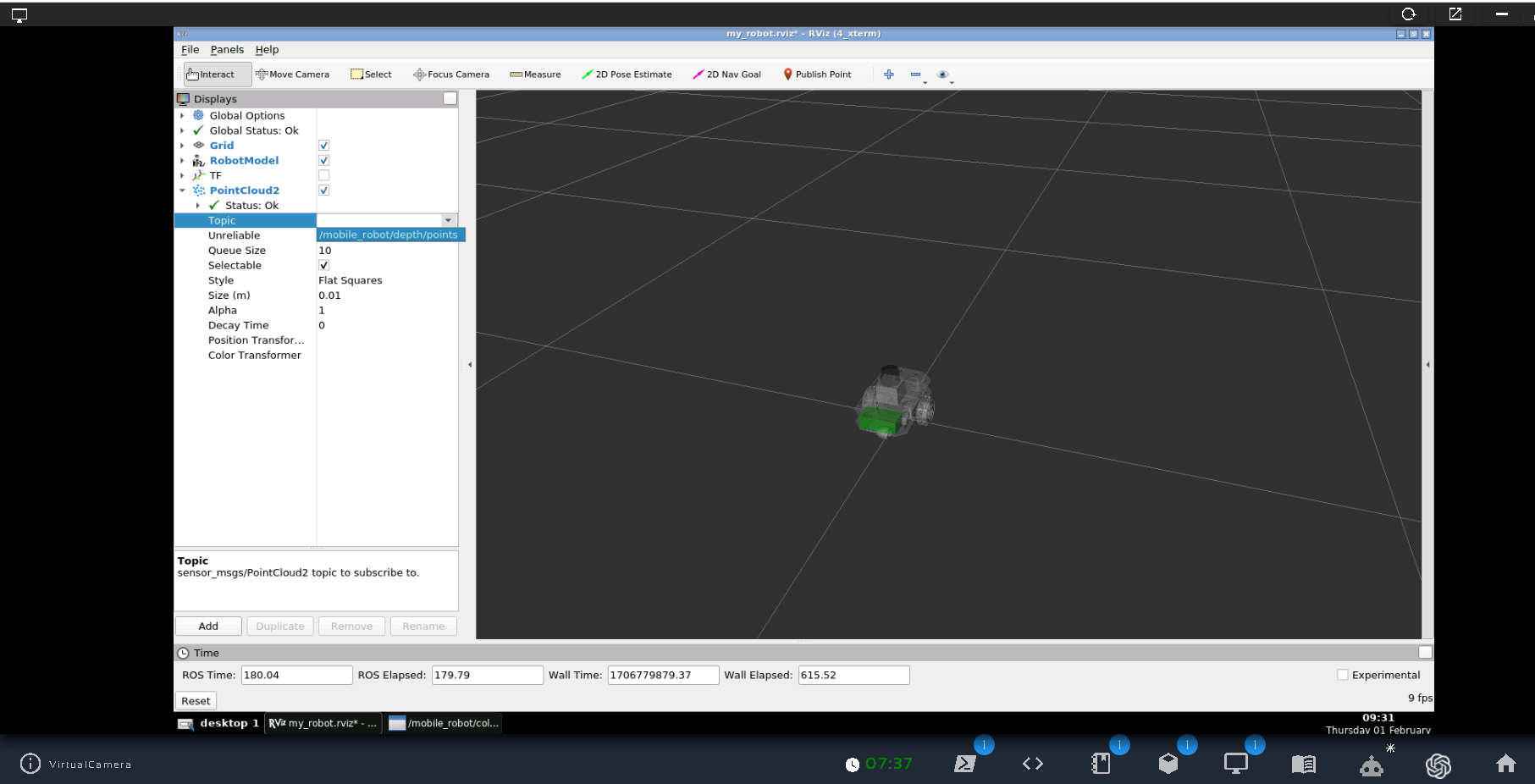
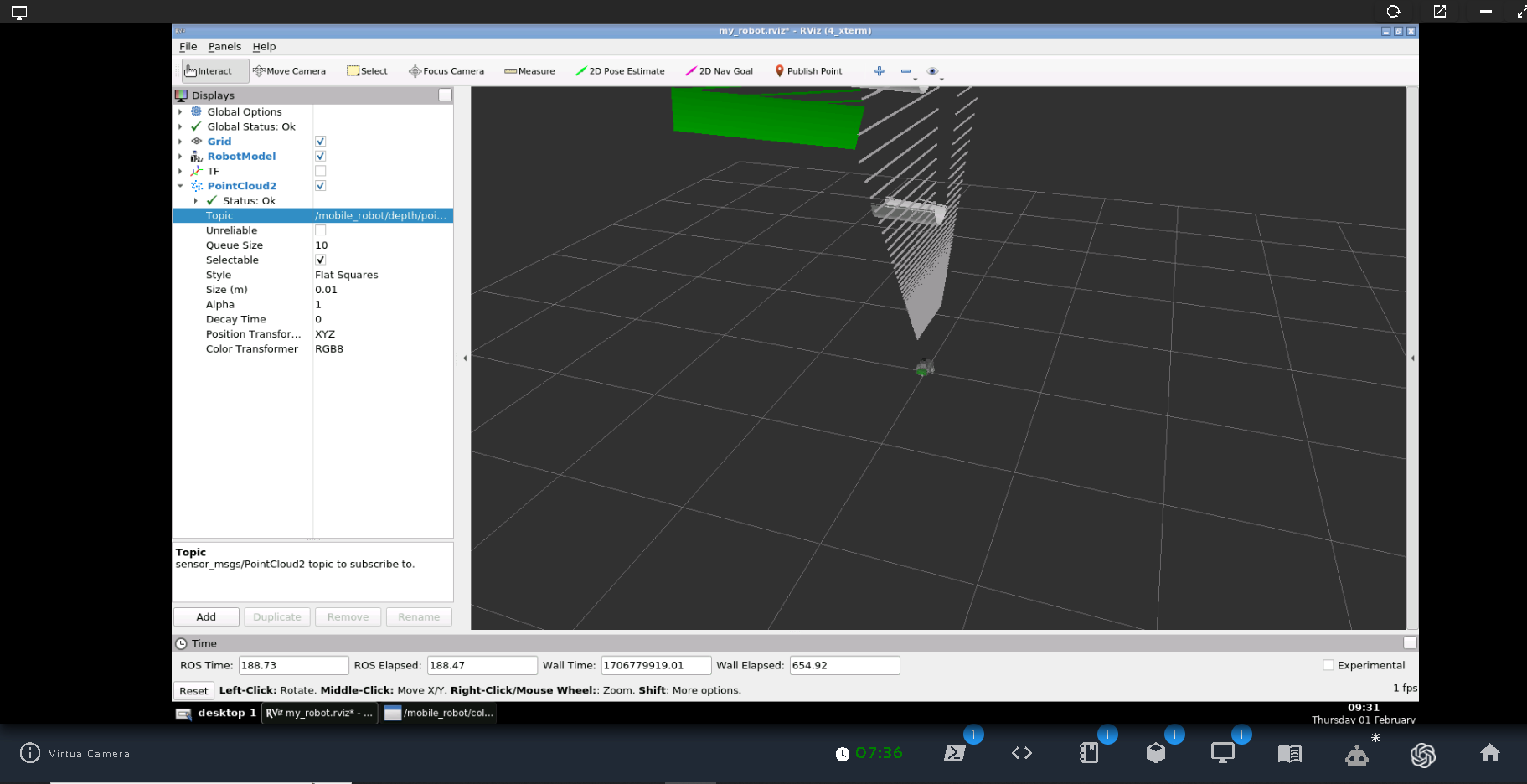
اس کے بعد، اس موضوع کو منتخب کریں جس پر پوائنٹ کلاؤڈ ڈیٹا شائع کیا گیا ہے جیسا کہ ذیل کی تصویر میں دکھایا گیا ہے۔
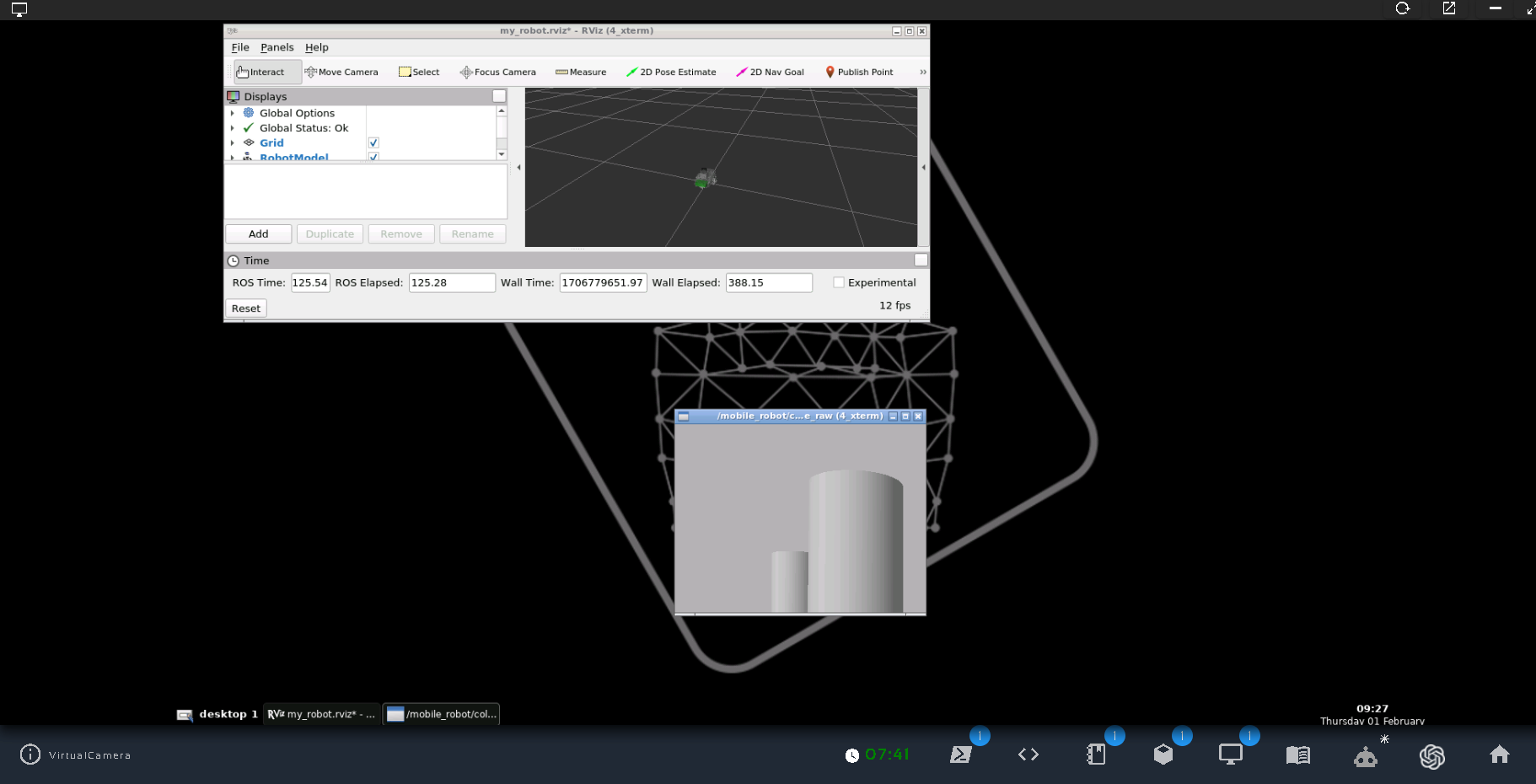
آپ پوائنٹ کلاؤڈ ڈیٹا کو دیکھ سکیں گے جو روبوٹ میں کیمرہ فریم کے میدان میں ہے، مندرجہ ذیل ہے۔
حتمی خیالات:
اب جب کہ ہمارے پاس گیزبو ماحول میں اپنے روبوٹ سمولیشن میں کیمرہ فیڈ موجود ہے، ہم اسے مختلف کاموں کو انجام دینے کے لیے استعمال کر سکتے ہیں جیسے کہ کمپیوٹر وژن، آبجیکٹ کا پتہ لگانے، سیمنٹک سیگمنٹیشن، اور لوکلائزیشن وغیرہ۔ یہ بھی نوٹ کریں کہ RViz میں پوائنٹ کلاؤڈ ڈیٹا غلط ہے۔ واقفیت. اس کو حل کرنے کے لیے ہمیں بیس لنک سے کیمرہ لنک میں کچھ سٹیٹک ٹرانسفارمز شامل کرنے ہوں گے (ہم آنے والی پوسٹس میں دیکھیں گے)۔