ROS-based Robot
Fetch
Works with
ROS 1

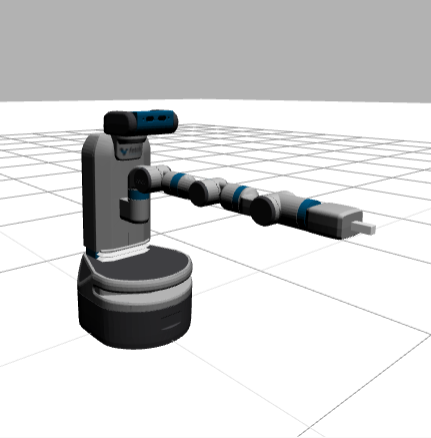
About Fetch

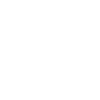
The Fetch mobile manipulator is designed to be robust, high performance, and low cost. It is a mobile manipulator that is both ready for commercial applications and available for research and development. Freight is the lower half a Fetch robot, utilizing the same drive and computation components. Freight also features a set of extensible mount and power points that allows the robot to be configured for a wide variety of tasks.
(source: Fetch Robotics)
Related courses
ROS Perception in 5 Days
Learn OpenCV, FaceRecognition, Person tracking and object recognition
ROS Manipulation in 5 Days
Learn how to make your manipulator interact with the environment using ROS

Deep Learning with Domain Randomization
Learn how to train any robot to recognize an object and pinpoint its 3D location
Using OpenAI with ROS
Use the power of OpenAI combined with ROS simulations the easiest way
Related resources
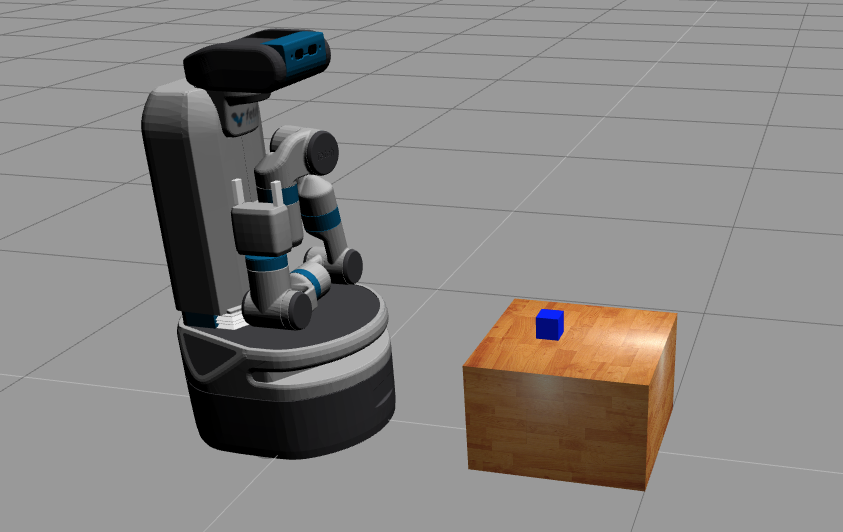
Tutorial - Create a MoveIt! package for Fetch robot
In the following video, I will show you how to create a MoveIt! package for controlling a Fetch robot.
Tutorial - Domain Randomization with Fetch robot with Gazebo and ROS
LIVE Class – Domain randomization with ROS, Gazebo and Fetch | Part1
In this class, we are going to see how to reproduce the results of the famous paper “Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World” with Fetch robot, using ROS and Gazebo simulation.
Get the rosject of this class (containing simulation, notebook with instructions and code): http://www.rosject.io/l/a085e1ca-8d71-4f44-9a1e-31cb9f8ae120/
The robot used: simulated Fetch
What you will learn:
- What is domain randomization
- How to implement it in Gazebo using a world plugin
- How the whole pipeline works: from training the vision system to making the robot grasp the spam object
- How to create the dataset to train the visual system using simulation images.
LIVE Class – Domain randomization with ROS, Gazebo and Fetch | Part2
This Live Class is about how to create datasets from simulations and how to manage them.
Get the rosject of this class (containing simulation, notebook with instructions and code): http://www.rosject.io/l/f2883cee-5fd8-41d6-bd5f-09b33862860b/
The robot used: simulated Fetch
What you will learn:
- How to create a dataset from simulation
- How to save/detach a dataset
- How to attach/load a dataset and associate it to a rosject
- How to parallelize dataset creation: create big datasets in a short amount of time