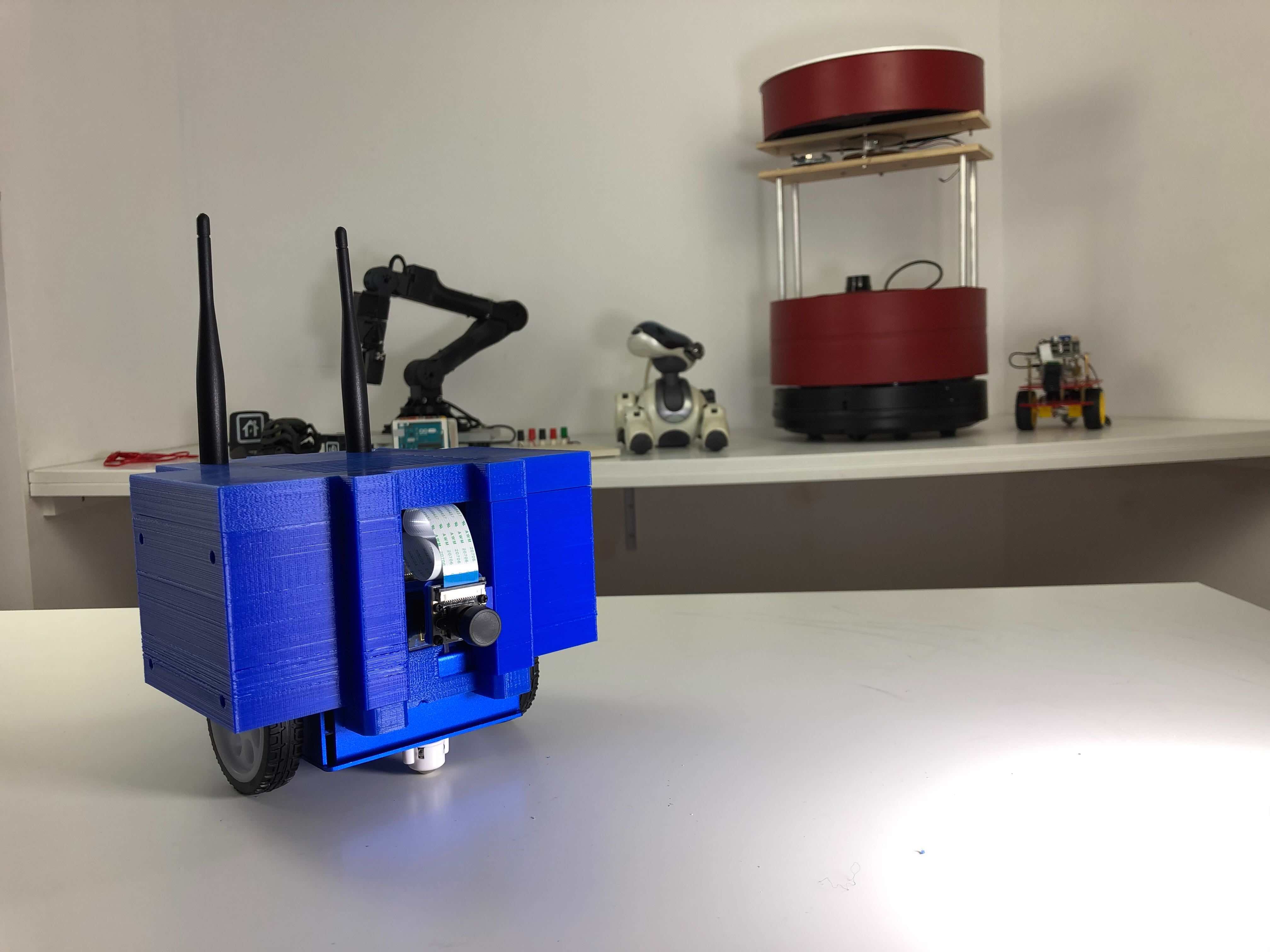
IgnisBot
IgnisBot is based on the NVIDIA Jetbot Project. Ignisbot strives to be the EASIEST and MOST COMPLETE robot for using ROS and NVIDIA Jetson NANO Artificial intelligence infrastructure (CUDA).

plug & play
IgnisBot Kit
Buy the IgnisBot Kit with everything ready to assemble and start learning. It comes with:
- All the 3D printed parts needed.
- All the components needed like electronics, batteries, screws, and so on.
- A microSD card with a preloaded OS with ROSmelodic and tested that all the course examples work.
Buy Now for €780


advanced
Do It Yourself
Buy all the materials listed in the bill of materials and make the robot by yourself.
Use all the list of materials (BOM), 3D files, and setup scripts given bellow. You will have to set-up the OS, print the 3D printed parts, and check that all systems work for this tutorial. You will also have to modify the servo driver to fit the assembly.
Bill of Materials (BOM)
Not including the 3D printed parts
WaveShare Jetson Nano Robot Kit
Batteries
128GB MircoSD Card. The minimum is 64 but had memory issues in installation. Better 128GB
WaveShare ServoDriver
MicroServos
Needed modification for the Servo Driver:
Due to the fact that the original PCB layout didn’t consider having a servo driver, the antennas collide with the servo driver. To avoid that, a part of it has to be shaved off. Luckily for us is a part that has nothing there. You can shave it very easy with a dremel like circular saw tool.
Here is a very nice tutorial on how to use a Dremel to cut: Dremel Tutorial.
Above all, be safe. If you are unsure of this, we recommend you to purchase the IGNISBOT KIT that this will have been done for you.

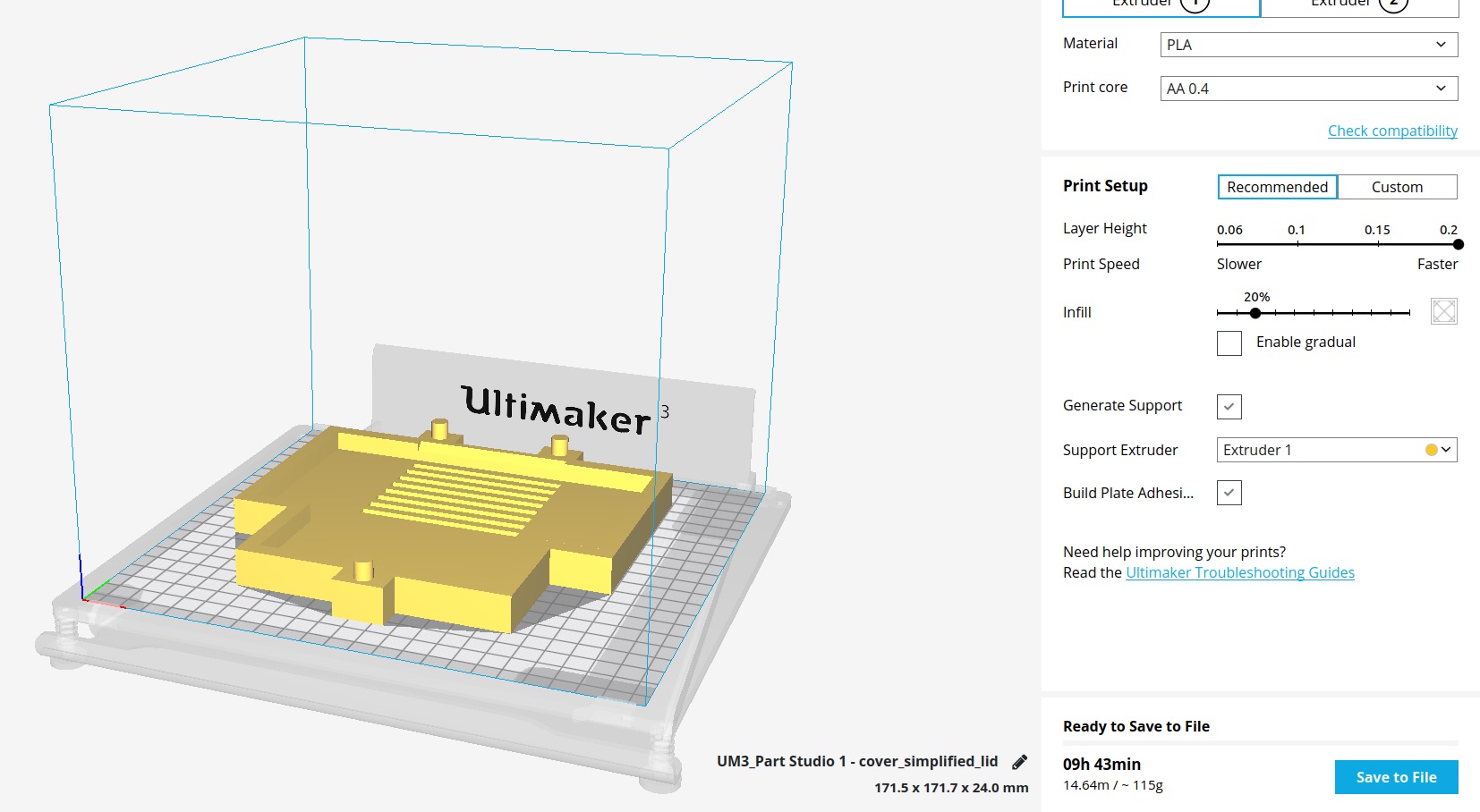
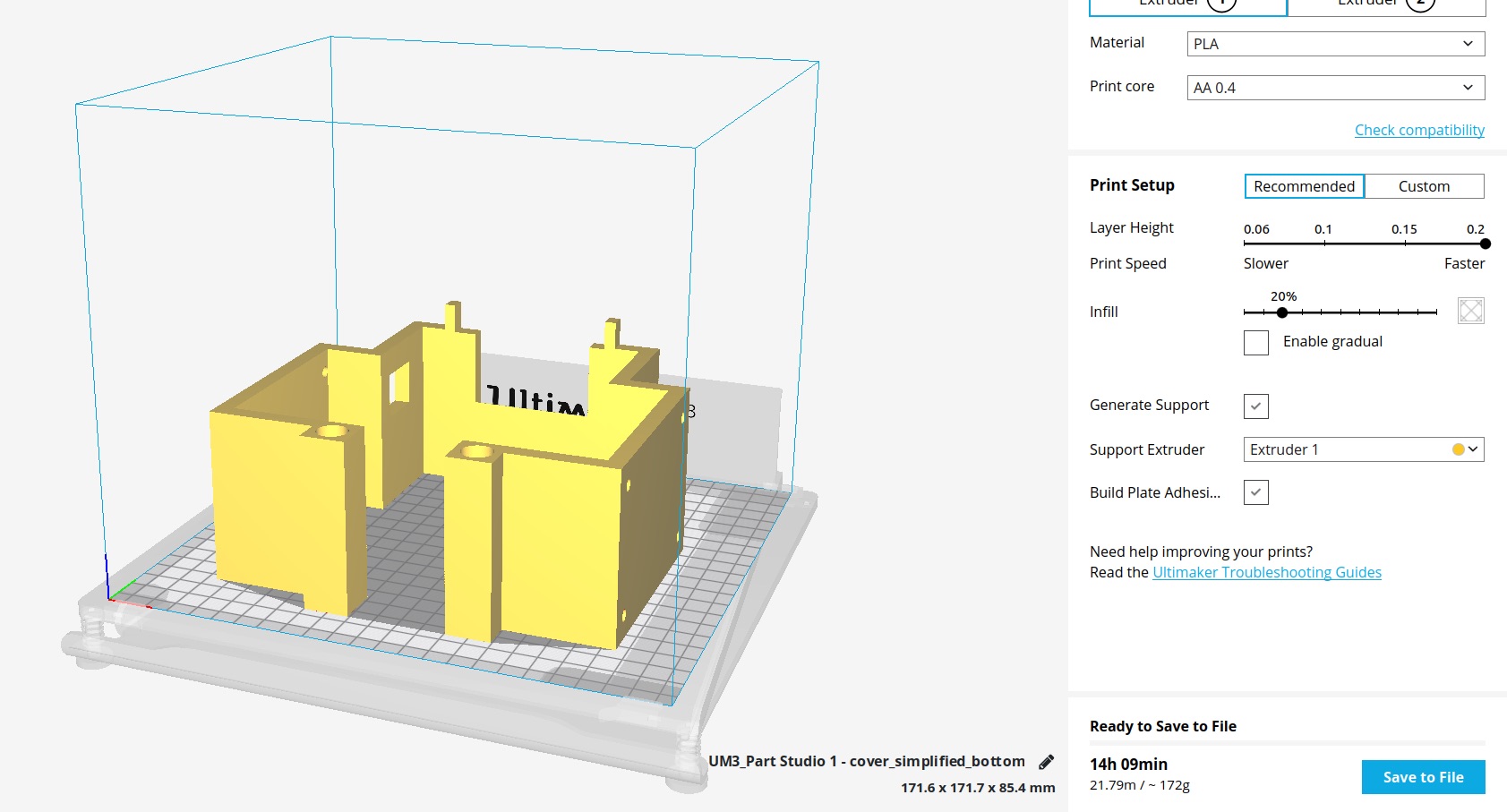
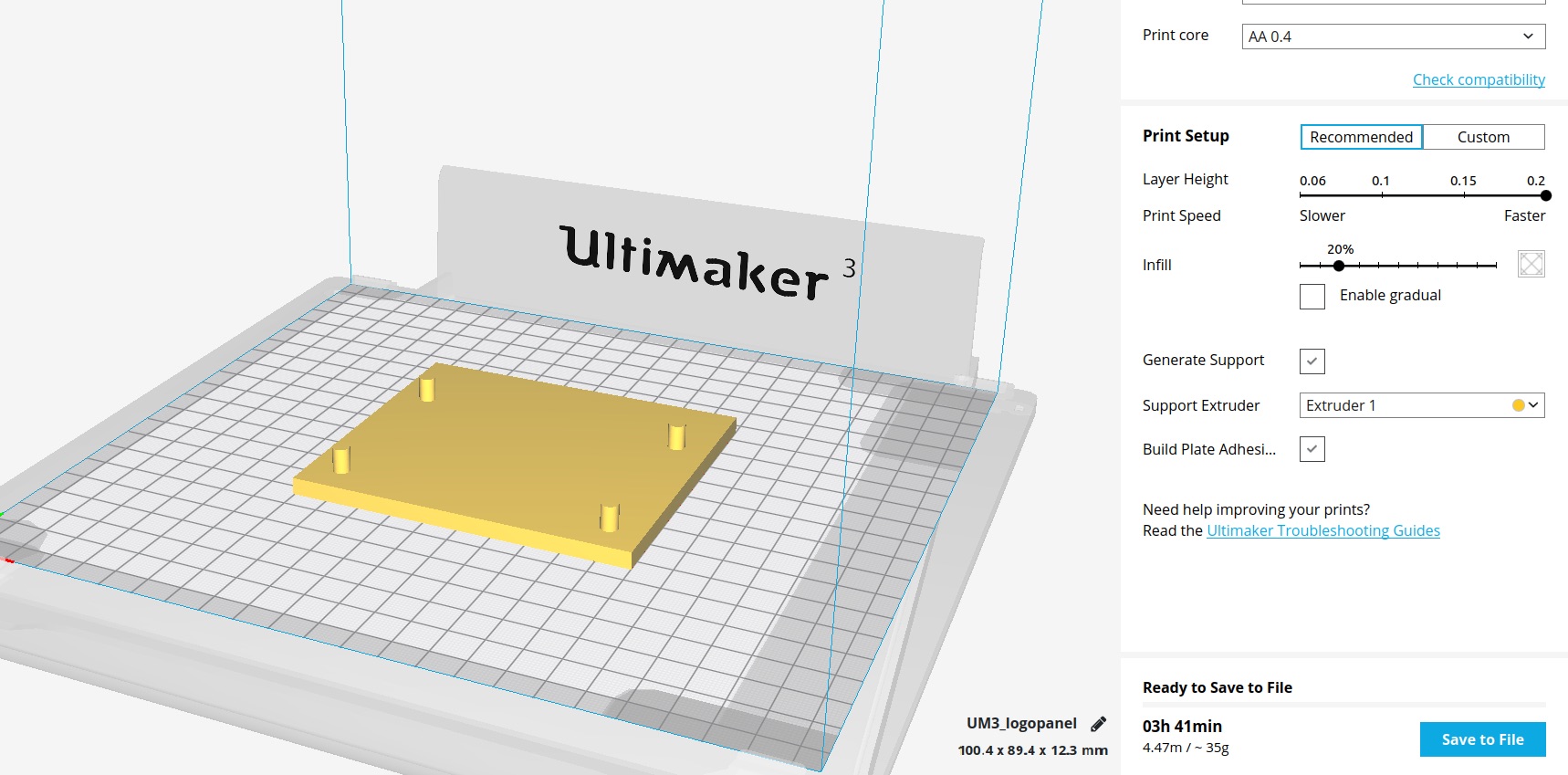
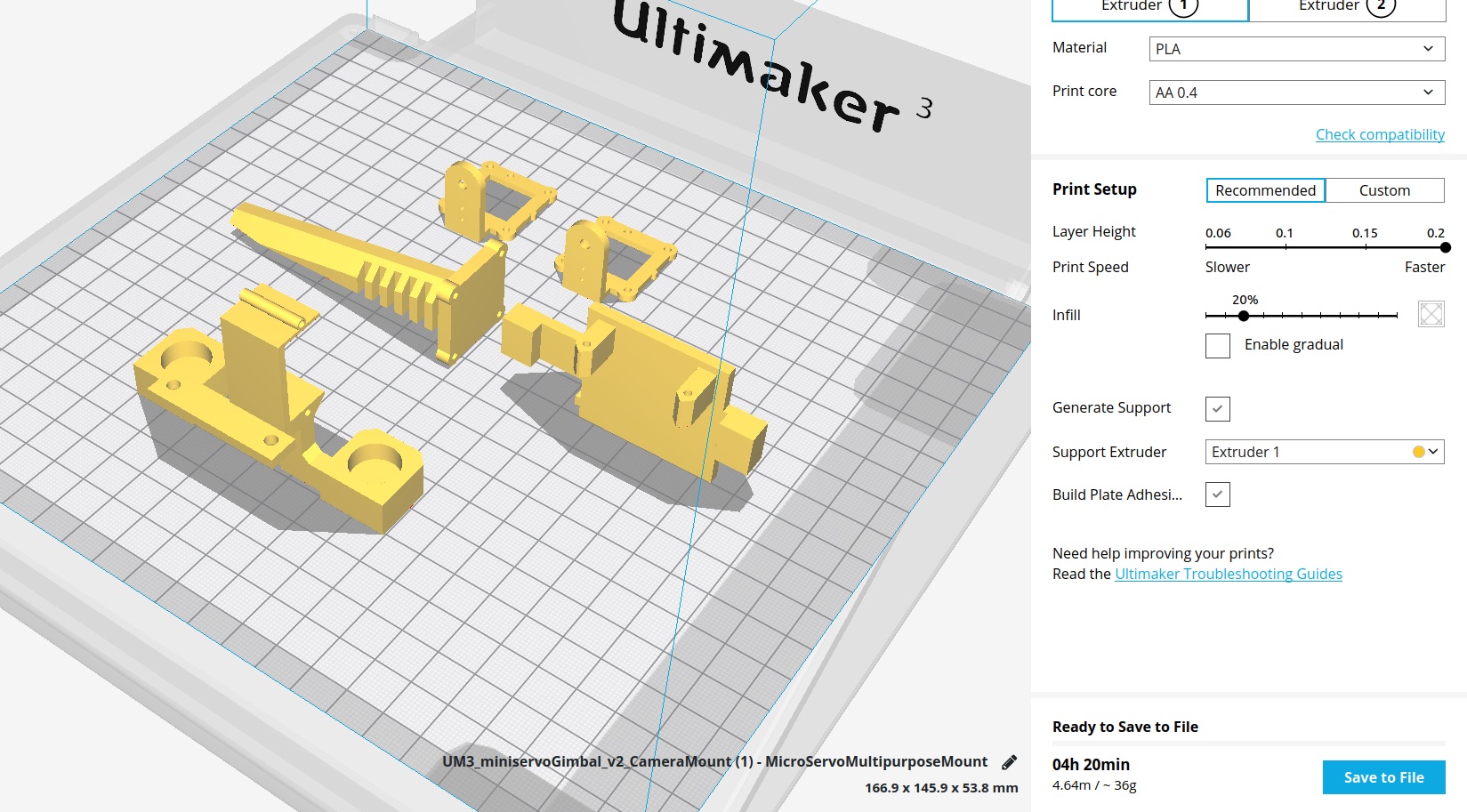
3D print files for IgnisBotLite
The STL parts are in meters as units. If you import them in blender 2.81 using meter units it will be displayed correctly.

Download the latest export here:
CAD files
You can find all the assembly in OnShape Asembly.

You are more than welcomed to improve and make any corrections you see fit.
Video Assembly Guide
Setup the NVIDIA Ubuntu Image:
We recommend the basic Ubuntu MicroSD card configuration explained in the WaveShare Wiki. There you will find all the steps to burn the Ubuntu iso into a MicroSDCard.
Setup Scripts For the course
This script should install everything you need to make it work. any issues, please post an issue in the git:
Install ROS real robot connection
Here you have a full tutorial on how to use the REAL ROBOT CONNECTION.
Follow the instructions of the git: GIT RealRobotConnection
This will allow you to connect to your IgnisBot from any place in the world, with all the ROS systems ready to go. Use ROS Development Studio to have a plug and play experience and develop your RobotApps.
Request more information
Related course
Using NVIDIA Jetson Nano with ROS
Learn Deep Learning using NVIDIA Jetson Nano with IgnisBot