

Hi ROS Developers and welcome to the ROS Developers Podcast: the program, the podcast that gives you insights from the experts about how to program your robots with ROS.
This is Ricardo Tellez, from The Construct.
Today, I would like to dedicate the podcast to the ROS Developers that are developing using C++. Really, you deserve a full day on the year dedicated to you. C++ ROS development is so much difficult than Python development, especially if you want to build complex systems with many nodes working. You still don’t have a day in the year, but at least, this episode is dedicated to you.
And today, it is my pleasure to introduce you Phillip J. Reed from SWRI . P.J. works at SWRI as a developer. There he has developed a bunch of very useful tools for different situations on ROS that we are going to review today here.
Related links:
- Follow Phillip J. Reed on Github
- The complete repo of SWRI about tools for robotics
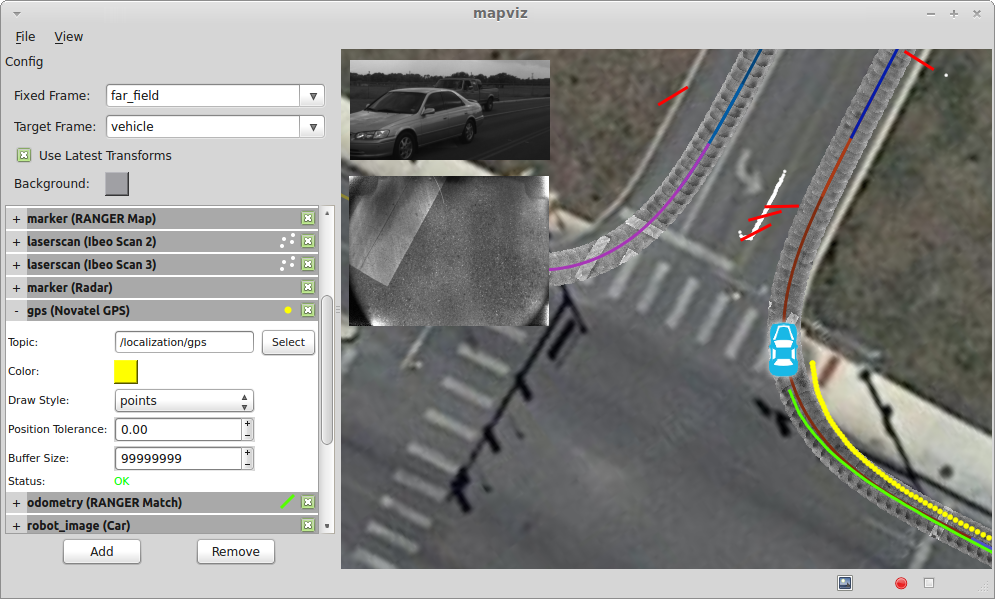
- ROS tool: Mapviz tool
- ROS tool: swri_profiler
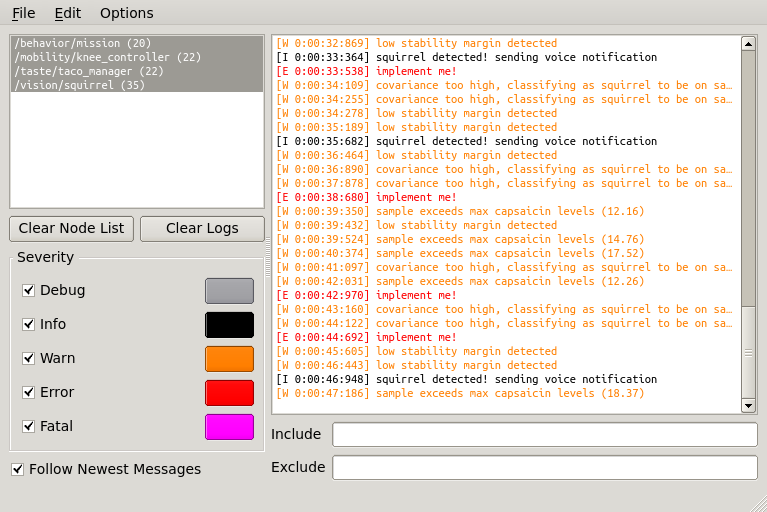
- ROS tool: swri_console
- ROS tool: imagezero_transport
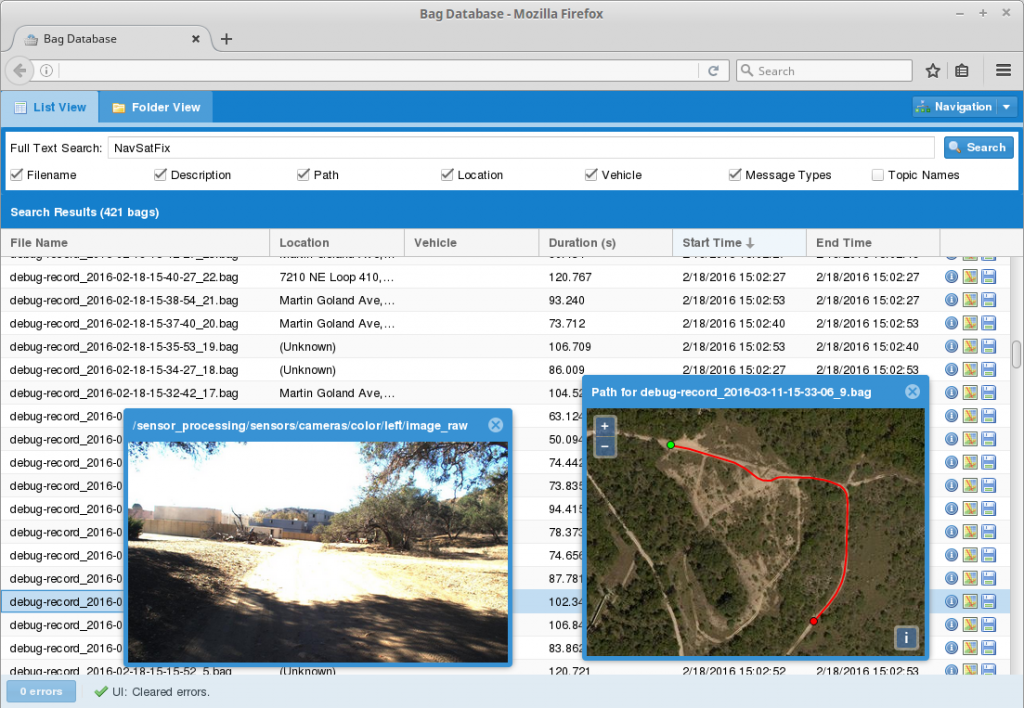
- ROS tool: bag database
- The Robot Ignite Academy, our online academy that teaches you ROS in 5 days using simulations
- The ROS Development Studio, our online platform to program ROS online only with a browser
- The ROS Developers Podcast full-length tune.
Subscribe to the podcast using any of the following methods
- ROS Developers Podcast on iTunes
- ROS Developers Podcast on Stitcher
Or listen to it on Spotify:
Podcast: Play in new window | Download | Embed
SUBSCRIBE NOW: RSS




0 Comments