Online Course
Advanced ROS2 Navigation
Take a deeper look at Navigation for ROS2

Course Overview
Would you like to get a piece of more advanced knowledge in ROS2 Navigation (Nav2)? This course covers some of these advanced topics that were left out of the basic ROS2 Navigation course.
What You Will Learn
How to use the Simple Commander API
How to use Costmap Filters
An explanation of the BT Navigator
How to create a custom behavior
How to use Groot for visualizing behaviors
How plugins are used in Nav2
How to create custom plugins for Nav2
The three main plugins of the controller server
100% Online
Intermediate Level
Approx. 12 hours to complete
Prerequisites
Simulated Robot Used
Neobotix MP-400 Simulation

The MP-400 can be used in more ambitious applications as an autonomous carrier of special equipment or as an experimental system in robotics research, the MP-400 masters almost all tasks, also with full ROS support.
Syllabus
Unit 1: Nav2 New Features
Nav2 provides new features and tools that make creating robot applications easier.
In this unit, you will review the essential new features introduced in Nav2, which include:
- Basic Nav2 operations through the Simple Commander API
- Use of the Waypoint Follower and Task Executor plugins via FollowWaypoints
- Introduction to Keepout Zones and speed-restricted zones
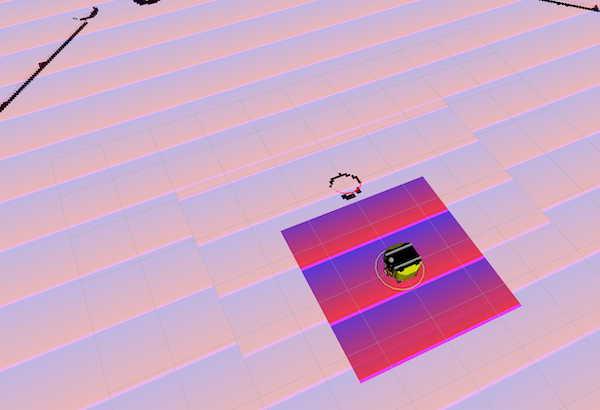
You will then create a basic autonomous robotics demo based on Nav2. You will do this in a simulated warehouse where robots are often deployed:

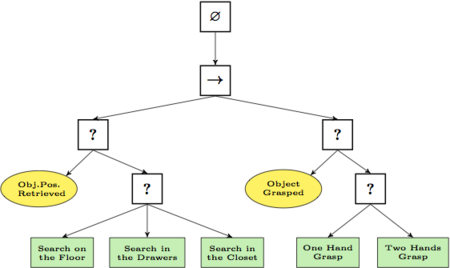
Unit 2: Behavior Trees
Nav2 uses Behavior Trees (BTs) to control the robot’s navigation behavior. BTs are used during standard navigation to a goal situation and during situations in which the robot cannot navigate (due to errors, blocking situations, etc.)
In this unit, you’ll learn how to create behavior trees for the bt_navigator
Unit 3: Nav2 Plugins
Plugins are used because they improve the flexibility of the Nav2 pipeline. Using plugins allows you to change only a yaml file of the controller, planner, etc., and completely change the functionality without much compilation overhead.
In this unit, you’ll learn:
- The basic structure and plugins used by default in Navigation2 (Nav2)
- How to create your custom Costmap Plugin
- How to create your custom Planner Plugin
- How to create your custom Controller Plugin
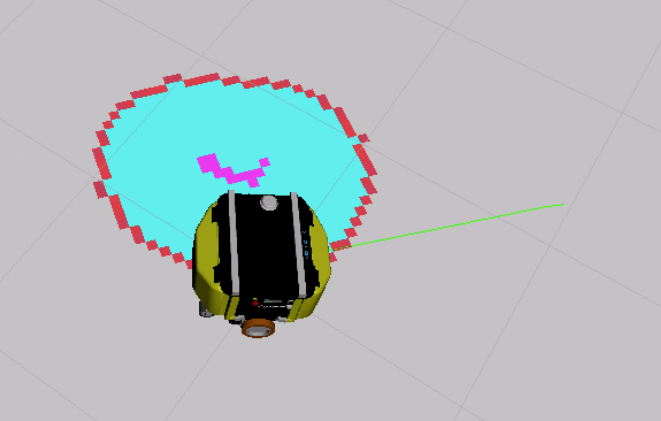
Unit 4: Controller Server in Deep
The controller_server is where the velocities of the wheel are computed. This is the key to solving problems when your robot does not behave correctly. So you need to master how it works.
In this unit, you’ll understand the different plugins and plugin options available for the controller server
What our students think
“I am wholeheartedly grateful for this outstanding opportunity. I wouldn’t have found a better ROS beginner-friendly course elsewhere. Thanks, ConstructSim !“
“I have tried to start learning ROS before and that was so difficult because I didn’t understand how to start, now with these introductory courses I am very excited because I can finally start to enter this world.“
“I really enjoy the practical aspect and learning by doing. I feel like I learn way faster and with a rich understanding.”
Course creator
Miguel Angel
Head of Research @ The Construct | Creator of over 10 ROS AI courses | Author of ROS IN 5 DAYS book collection

Alberto Ezquerro
Head of Education @ The Construct | Creator of over 30 ROS courses | Author of ROS IN 5 DAYS book collection

Ricardo Téllez
CEO @ The Construct | Teacher of Robotics at La Salle University and Universitat Politècnica de Catalunya
Related courses

ROS2 Navigation (Galactic)
Learn how to make robots autonomously navigate using Nav2
ROS2 Basics (Python)
Learn the fundamentals of ROS2 to understand and be able to program robots.
ROS2 Basics for C++
Learn how to start working with ROS2
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED