Online Course
Robot Control Basics
Learn various methods and techniques of modern robot control.

Course overview
This course includes teaching the fundamental bases of control applied in robotics, starting from different control laws and applying different control methods to optimize the output of our systems. Using experimental results gain insights about the influence of each term within a PID controller.
What You Will Learn
Proportional-Integral-Derivative PID control basics
How to generate a trajectory through a given set of two or more joint positions
Multivariable controllers including inverse dynamics and test their response to a sinusoidal set point
How to apply a desired end-effector force based on feedback from a force sensor
100% Online
Basic Level
Approx. 18 hours to complete
Prerequisites
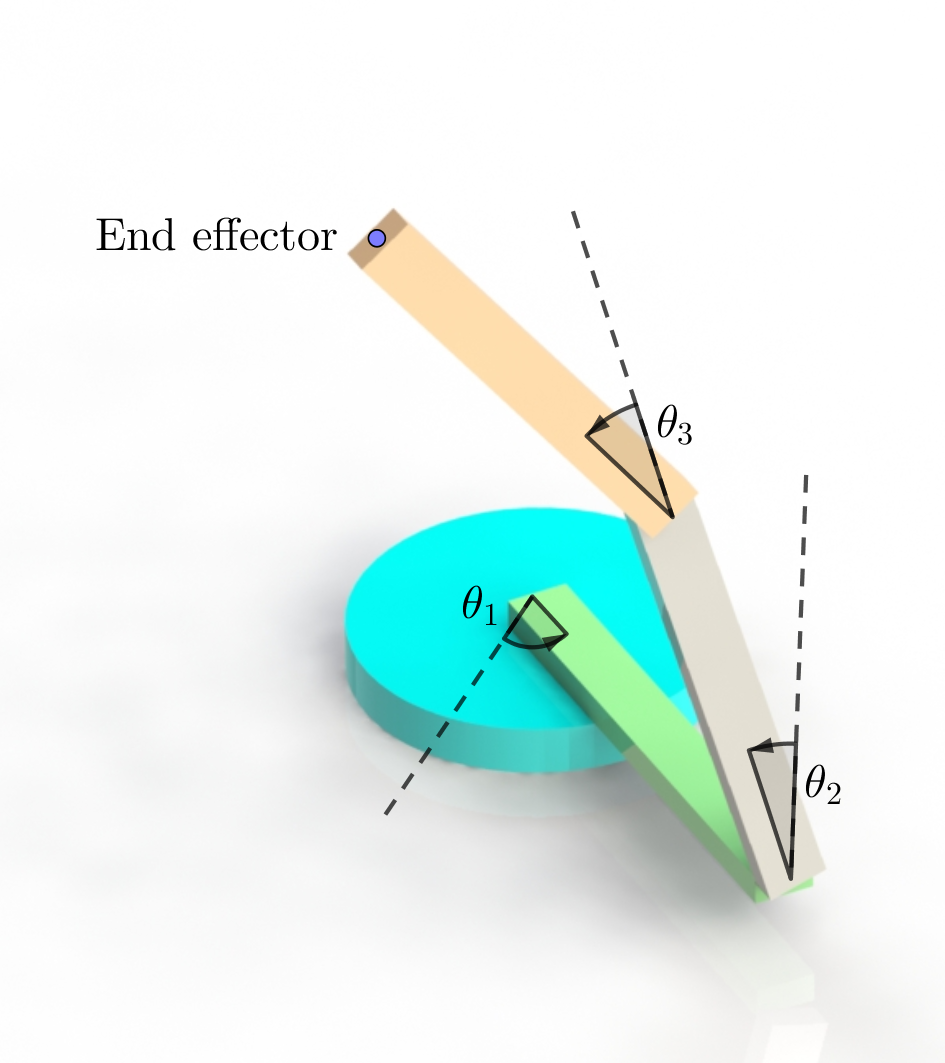
Simulated Robot Used
RRBot

Throughout the course, you will use RRBot to learn and practice every topic in Robot Control
Syllabus
Unit 1: Introduction
In this unit, you will learn the objectives of this course on the control of robotic arms with a focus on its dynamic model, learning methods, and tools.
Unit 2: PID control
In this unit, you will start learning robotics control, including the following topics:
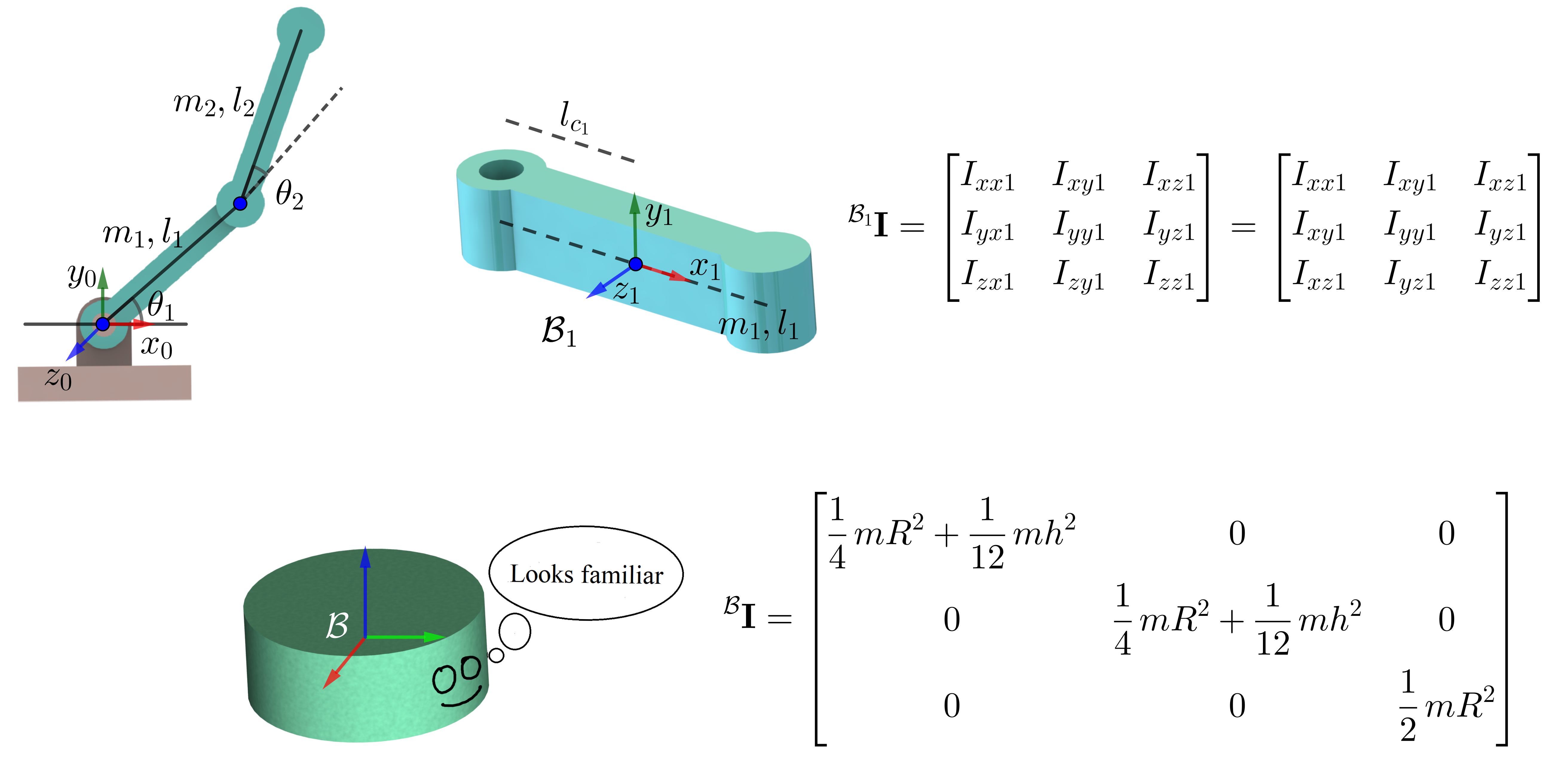
- Robot dynamics review
- Actuator dynamics
- Proportional control
- Derivative control
- Integral control
- PD control
- PI control
- PID control
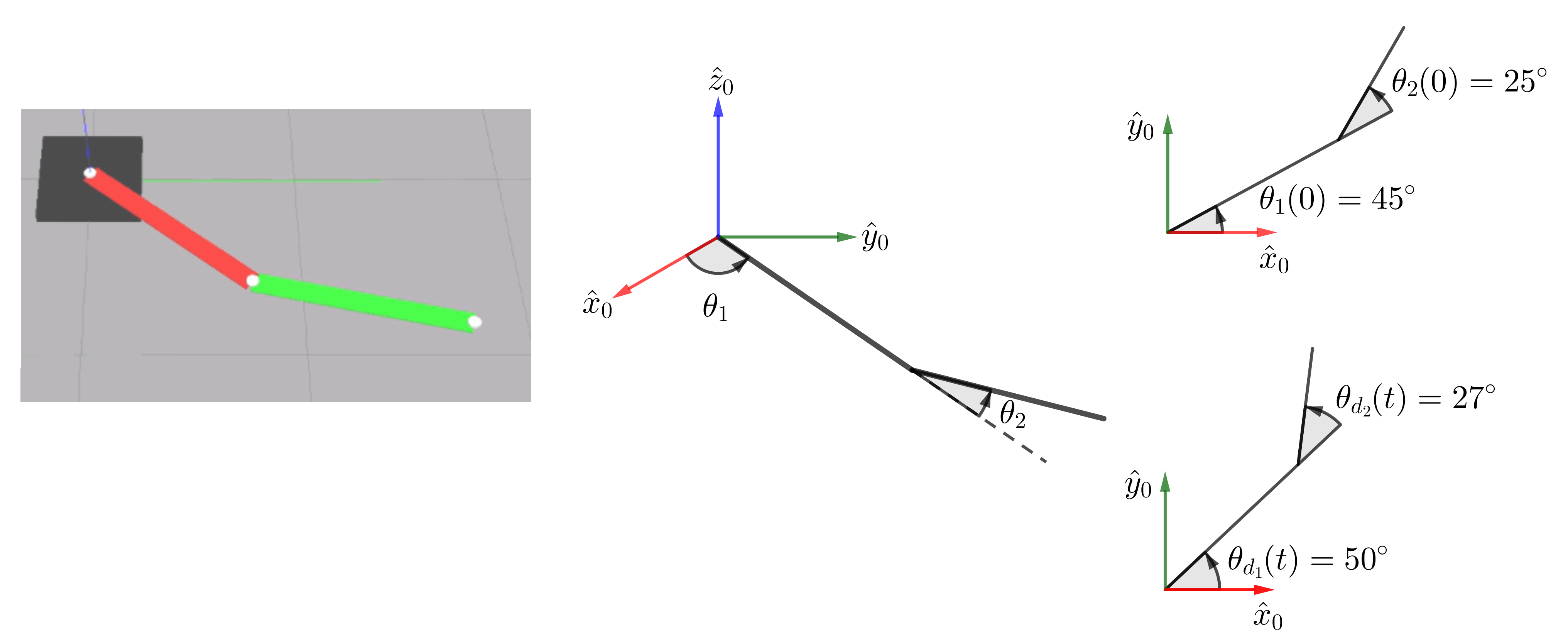
Unit 3: Independent joint control
In this unit, you will start learning robotics control including the following topics:
- Set-Point Tracking
- Trajectory generation
Unit 4: Multivariable control
In this unit, you will learn more about PD control and inverse dynamics, including the following topics:
- PD Control revisited. Yes, again, but it is so necessary.
- Inverse dynamics.
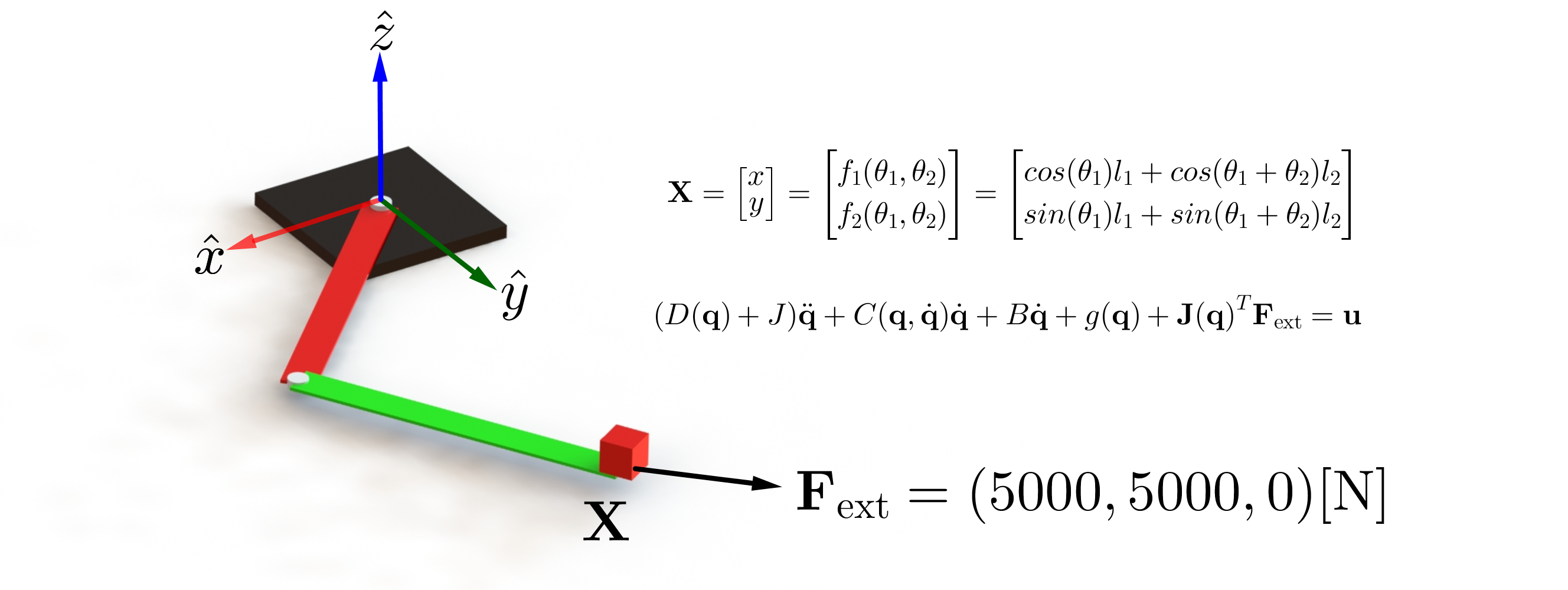
Unit 5: Force control
In this unit, you will learn about the effects of external forces on the end-effector of a robot, including the following topics:
- Jacobian of the manipulator (to apply Force control first you need to know how to calculate the Jacobian of the robot).
- Force control and implementation.
Unit 6: Final Project
In this unit, you will finish the final project, where you will apply all learned doing point-to-point control in the 2dof robotic arm.
What our students think
“I have had a great experience with The Construct. I believe much of what I have learned thus far regarding ROS has been from these courses and the concepts behind the implementation of ROS have been helpful even outside of ROS applications.”
“I’m very happy about working with The Constructsim, it is affordable, it is very comfortable for me, and the tools in the GUI are very useful”
“I really liked the learning approach based on projects and practical examples and I found the final project with an actual robot to be very useful and challenging.”
Course creators

Christian Alberto Chávez Vásquez
ROS Developer. Master’s Degree in Robotics, Automation, and Home Automation. Has worked on ROS projects with navigation, exploration, industrial robotics, and artificial vision.
Related courses
C++ for Robotics
Master the basics of C++ for robot programming
RO2 Basics (Python)
Learn the fundamentals of ROS2 to understand and be able to program robots.
ROS2 Basics for C++
Learn how to start working with ROS2
Discover more Robotics Courses

Start Learning Now.
RESULTS GUARANTEED