

What we are going to learn
Learn how to get the position and orientation of a robot, when someone asks through ROS Services.
List of resources used in this post
- The ROSject of the project with the simulation and the ROS Packages: www.rosject.io/l/ee2768a/
- Robot Ignite Academy courses: www.robotigniteacademy.com/en/
- The post in ROS Discourse where the challenge was posted: https://discourse.ros.org/t/rosject-of-the-week-challenge-6/11918
Opening the ROSject
Once you clicked in the ROSject link provided (https://buff.ly/2Pd5msM) you will get a copy of the ROSject. You can then click Open to have it open.
Where to find the code
Once you open the ROsject, in the ~/catkin_ws folder, you will find all the ROS packages associated with this challenge. You can have a look at it using the IDE, for instance.
To see the full code, open the IDE by going to the top menu and select Tools->IDE
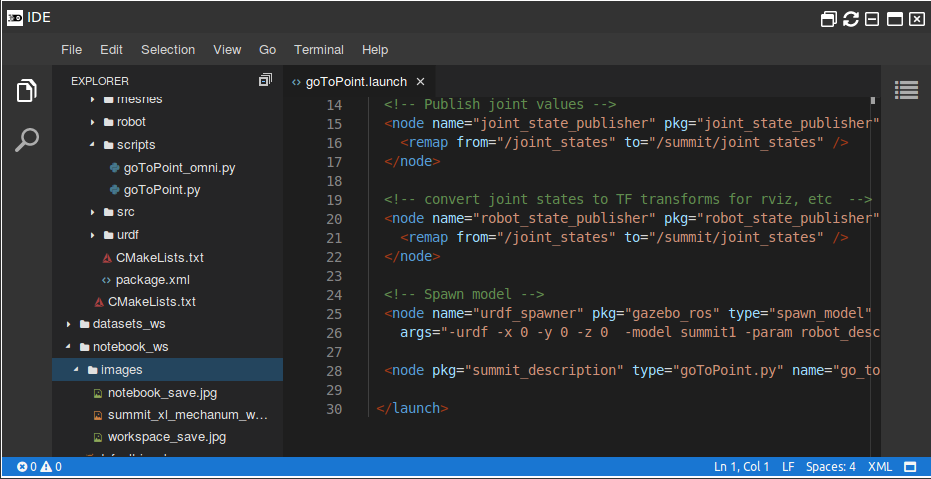
Code Editor (IDE) – ROSDS
Launching the Simulation
Go to the top menu and select Simulations. On the menu that appears, click on the Choose launch file… button.
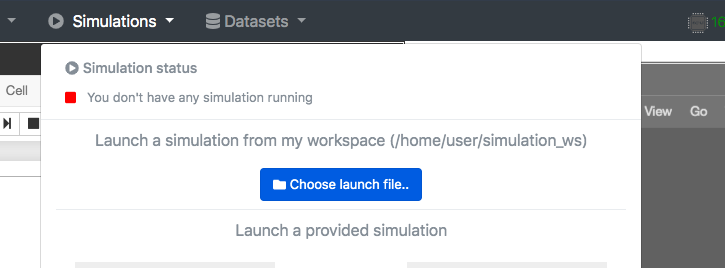
Choose lunch file to open simulation in ROSDS
Now, from the launch files list, select the launch file named rotw5.launch from the rosbot_gazebo package.
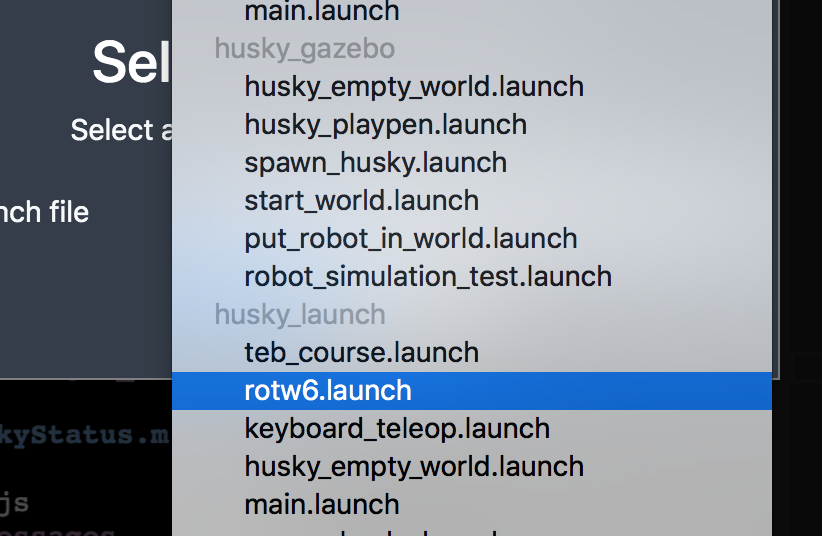
ROS Mini Challenged #6 – launch file
Finally, click on the Launch button to start the simulation. In the end, you should get something like this:
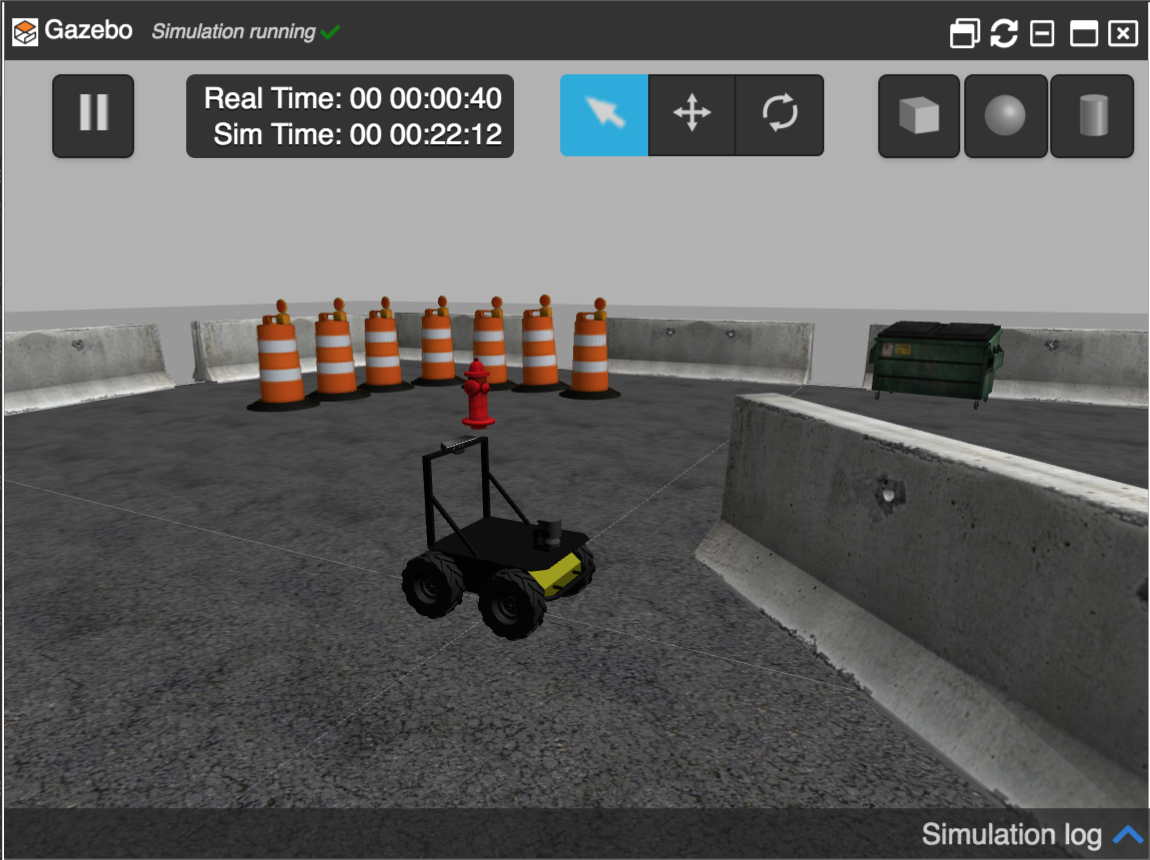
Husky Simulation in ROSDS
The problem to solve
As you can see, this ROSject contains 1 package inside its catkin_ws workspace: rotw6_pkg. This package contains a couple of Python scripts (get_pose_service.py and get_pose_client.py), which contains a Service Server and a Client, respectively.
So, the main purpose of this Service is to be able to get the Pose (position and orientation) of the Husky robot when called. In order to get the Pose of the robot, all you have to do is the following:
source ~/catkin_ws/devel/setup.bash
rosrun rotw6_pkg get_pose_service.py
Finally, just launch your Service Client with the following command:
rosrun rotw6_pkg get_pose_client.py
Get robot pose service in ROSDS
NOTE: Here, it’s VERY IMPORTANT to note that it’s only retrieving the position and orientation of the robot, without any additional data.
Solving the ROS Mini Challenge
Ok, so… where’s the problem? If you have tried to reproduce the steps described above you have already seen that it DOES NOT WORK. When you run the Service Client, you are getting some errors that aren’t supposed to be there. So… what’s going on?
When we launch the service client, we get something like the error below:
user:~$ rosrun rotw6_pkg get_pose_client.py
Traceback (most recent call last):
File "/home/user/catkin_ws/src/rotw6_pkg/src/get_pose_client.py", line 11, in <module>
result = get_pose_client(get_pose_request_object)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 435, in __call__
return self.call(*args, **kwds)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 495, in call
service_uri = self._get_service_uri(request)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 444, in _get_service_uri
raise TypeError("request object is not a valid request message instance")
TypeError: request object is not a valid request message instanc
The original content of the get_pose_client.py in the rotw6_pkg package is:
#! /usr/bin/env python
import rospy
from std_srvs.srv import Empty
rospy.init_node('rotw6_client')
rospy.wait_for_service('/get_pose_service')
get_pose_client = rospy.ServiceProxy('/get_pose_service', Empty)
get_pose_request_object = Empty()
result = get_pose_client(get_pose_request_object)
The problem is on the line get_pose_request_object = Empty(). We need to use EmptyRequest instead. The correct client, then, would be:
#! /usr/bin/env python
import rospy
from std_srvs.srv import Empty, EmptyRequest
rospy.init_node('rotw6_client')
rospy.wait_for_service('/get_pose_service')
get_pose_client = rospy.ServiceProxy('/get_pose_service', Empty)
get_pose_request_object = EmptyRequest()
result = get_pose_client(get_pose_request_object)
If we now run the client again, we should see no errors:
rosrun rotw6_pkg get_pose_client.py
and in the output of the server, we have:
$ rosrun rotw6_pkg get_pose_service.py
Robot Pose:
header: seq: 86596 stamp: secs: 3032 nsecs: 830000000
frame_id: "odom"
child_frame_id: "base_link"
pose:
pose:
position:
x: -0.0712665171853
y: -0.00030466544589
z: 0.0
orientation:
x: 0.0
y: 0.0 z: -0.493612905474 w: 0.869681723132 covariance: [86.67158253691281, -6.76509699953108e-05, 0.0, 0.0, 0.0, -0.010918187001924307, -6.765096999530603e-05, 86.68358224257844, 0.0, 0.0, 0.0, -0.18378969144765284, 0.0, 0.0, 4.997917968019755e-07
, -4.557105661285207e-23, 3.4006027312434455e-20, 0.0, 0.0, 0.0, -4.5571056612852066e-23, 4.99583853513
7798e-07, 2.1597386386459286e-32, 0.0, 0.0, 0.0, 3.4006027312434443e-20, -6.711057929105504e-33, 4.995838535137798e-07, 0.0, -0.010918187001923645, -0.18378969144767304, 0.0, 0.0, 0.0, 103.95483332789887]
twist:
twist:
linear:
x: -1.972482338e-05
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0292241612329
covariance: [0.0008855670954413368, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0008855670954413368, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 4.996877927028334e-07, -7.07772753671664e-33, 5.268413186594352e-30, 0.0, 0.0, 0.0, -7.077727536716642e-33, 4.987546680559569e-07, 1.3419297548549267e-41, 0.0, 0.0, 0.0, 5.268413186594355e-30, -4.178170793934322e-42, 4.987546680559569e-07, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 9.592381167731944e-07]
as you can see, we have too much data in the output. We just need to show the position and orientation. The reason why we have so much data is that in the server code (get_pose_service.py) we print the message directly. The original server code is:
#! /usr/bin/env python
import rospy
from std_srvs.srv import Empty, EmptyResponse
from geometry_msgs.msg import PoseWithCovarianceStamped, Pose
from nav_msgs.msg import Odometry
robot_pose = Pose()
def service_callback(request):
print "Robot Pose:"
print robot_pose
return EmptyResponse()
def sub_callback(msg):
global robot_pose
robot_pose = msg
rospy.init_node('rotw6_service')
my_service = rospy.Service('/get_pose_service', Empty , service_callback)
sub_pose = rospy.Subscriber('/odometry/filtered', Odometry, sub_callback)
rospy.spin()
The message type is Odometry. With rosmsg show Odometry we can see this message type has a lot of fields:
$ rosmsg show Odometry
[nav_msgs/Odometry]:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
float64[36] covariance
In the message structure above, we are only interested in the position and orientation. To achieve that, in the server we can just change the sub_callback function from:
def sub_callback(msg):
global robot_pose
robot_pose = msg
to:
def sub_callback(msg):
global robot_pose
robot_pose = msg.pose.pose
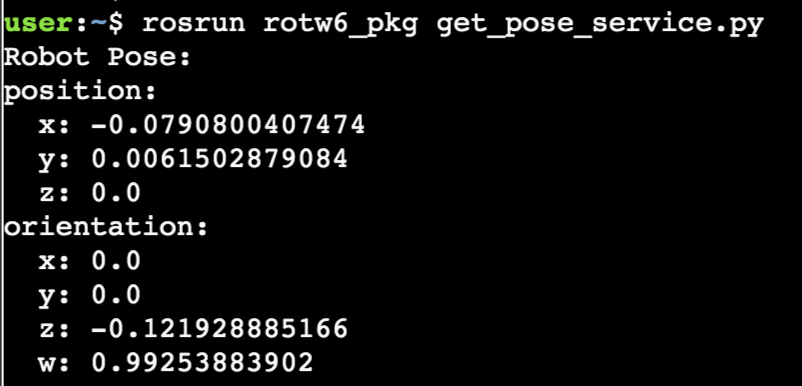
as easy as that. Pretty easy, right?
If for any reason you are still struggling to understand or memorize the steps reproduced here, I highly recommend you taking our ROS courses at www.robotigniteacademy.com/en/ .
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.





0 Comments