ROS-based Robot
ROSbot
With the ROSbot robot simulation, you can do similar stuff without the risk of damaging the real version. You can use it to test any algorithms, such as Robot Navigation, Motion Planning, Object detection. Once you have your code working in the simulation, you can directly execute it in the real ROSbot robot, with minimal to no changes!
Works with
ROS 1
ROS 2

About ROSbot

ROSbot is a 4×4 drive autonomous mobile robot platform equipped with LIDAR, RGB-D camera, IMU, encoders, distance sensors available in two versions: 2.0 and 2.0 PRO. Powered by ROS.
ROSbot is an affordable robot platform for rapid development of autonomous robots. It can be a base for custom service robots, inspection robots and robots working in swarms.
- Read the full ROSbot manuals
- Using ROSbot with ROS2 Full Official Tutorial
Related courses
Python 3 for Robotics
Master the basics of Python 3 for robot programming
Robot Used: ROSbot
C++ for robotics
Master the basics of C++ for robot programming
Robot Used: ROSbot
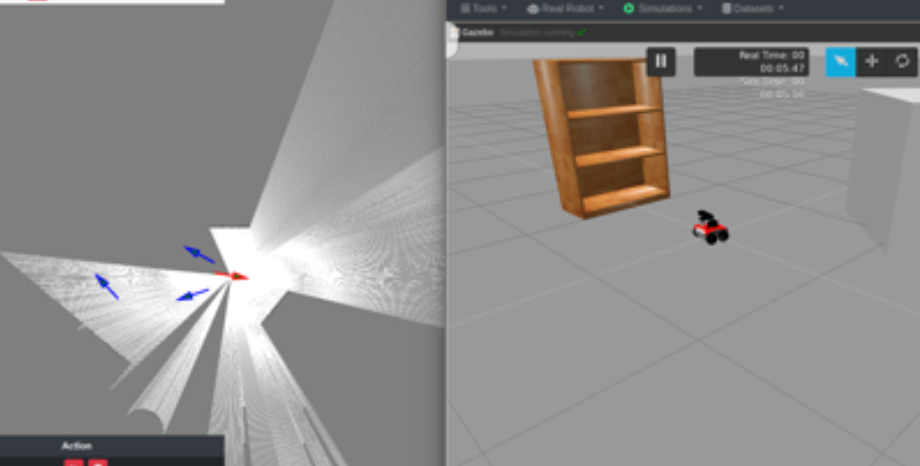
OpenCV Basics for Robotics
Learn how to work with OpenCV in ROS
Robot Used: ROSbot
Related resources
LIVE Class – ROSbot Programming
In this class, you will learn how to program the ROSbot by Husarion.
Using the ROSbot, you will create a map and navigate within it, using all the necessary parameters or info of the ROSbot in the files, in order for it to work properly both in a simulation and in an environment with the real robot.
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/1f32b7ea-35d9-45c9-9f6b-bff9079fb36a
LIVE Class – Basic C++ for robotics: Arrays and Pointers
Part 1:
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/6af17561-257f-43c2-97e7-220a66e59fd5
Part 2:
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/6af17561-257f-43c2-97e7-220a66e59fd5
In this Live Class, we will show how to use arrays and pointers, which are very common tools used in C++ programming. Robot Used: ROSbot
What you’ll learn:
- How to work with arrays in C++
- How to work with pointers in C++
- How to apply these concepts to robot programming
LIVE Class – Basic Probability for Robotics
In this Live Class, we will show you some of the most basic concepts related to probability and how to apply them to robotics.
Robot Used: ROSbot
What you’ll learn:
- Basics of probability
- How to apply these concepts to robotics programming
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/9313d8e0-fc36-4198-aff7-6a0e0e553a8d
LIVE Class – Send Navigation Commands Programmatically
You probably know how to send navigation goals to your robot using Rviz. But how can you control the navigation goals of a robot from within your own program?
In this live class, we will learn how to build simple Python programs to set the initial location of the robot in the map, and send the robot to a given location through the ROS Navigation stack. We will start from an already working navigation system with a ROSbot (map included, localization running and move based configured). Then we will build our own program that sends goals to move the robot around the space autonomously, without having to manually interact with it.
Robot used: ROSbot
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/8fff7fd0-811b-47bf-a78e-38a7df7b2c71
LIVE Class – Make Your Robot Patrol An Area
How to make a robot move around an indoor area, following a fixed path, while avoiding unexpected obstacles?
In this Live-Class, you’ll learn how to create a ROS program that uses the ROS Navigation stack to make a robot patrol an area!
Patrolling means that the robot is going to move around an area making a kind of fixed path. This can be very useful for tasks of security inspection, stock analysis or cleaning spaces. In those cases, the robot usually has to move in a fixed path everyday while it is doing at the same time another task (for example, in the case of security inspection, the robot has to identify if there is an intruder, or in the case of cleaning spaces, the robot has to clean all the ground it is moving through).
In the class, we’ll define a procedure to capture the main points of the trajectory that the robot has to follow. Then, we will create a ROS program that calls the ROS Navigation Stack with those points, making the robot follow them in an endless loop.
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/44a3cf33-0ae3-4a0b-b3dd-d1ee0a02e14f
LIVE Class – What are ROS Messages?
Messages are like the blood of a ROS system. In this live class, you are going to learn why.
Robot used: ROSbot
We will cover:
- What is a ROS message and what is it used for?
- How to see the structure of a ROS message
- How to define the structure of a ROS message
- Which types of messages exist
- How and when to create your own type of message.
Class’s ROSJECT: https://app.theconstructsim.com/#/LiveClass/1393a5f0-2041-407e-bf16-8a0282426a8e
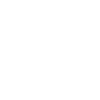
Tutorials - Launching Husarion ROSbot navigation demo in Gazebo simulation
In this video, we will learn how to install the ROSBot Gazebo simulation in just 5 minutes and how to launch the mapping and navigation demos that it includes.