In this post, you will learn how to use the Gazebo differential drive plugin in ros 2. This post answers the following question posted on ROS Answers.
Step 1: Copy a sample project with a ROS 2 Gazebo simulation using the differential drive plugin
“Hey, do I have to install ros2 first?” Absolutely not! We will be using The Construct to get access to virtual machines pre-installed with ROS.
Click here to copy the ROS2 TurtleBot3 sandbox project. Once copied, click the red RUN button to launch the project in a virtual machine. Please be patient while the environment loads.
PS: You will need to log in or create an account to copy the packages.
You might also want to try this on a local PC if you have ros2 and some executables installed. However, please note that we cannot support local PCs and you will have to fix any errors you run into on your own. The post assumes that you are working on The Construct; please adapt them to your local PC and ros2 installation.
Step 2: Find and explore the Gazebo model file containing the differential drive plugin
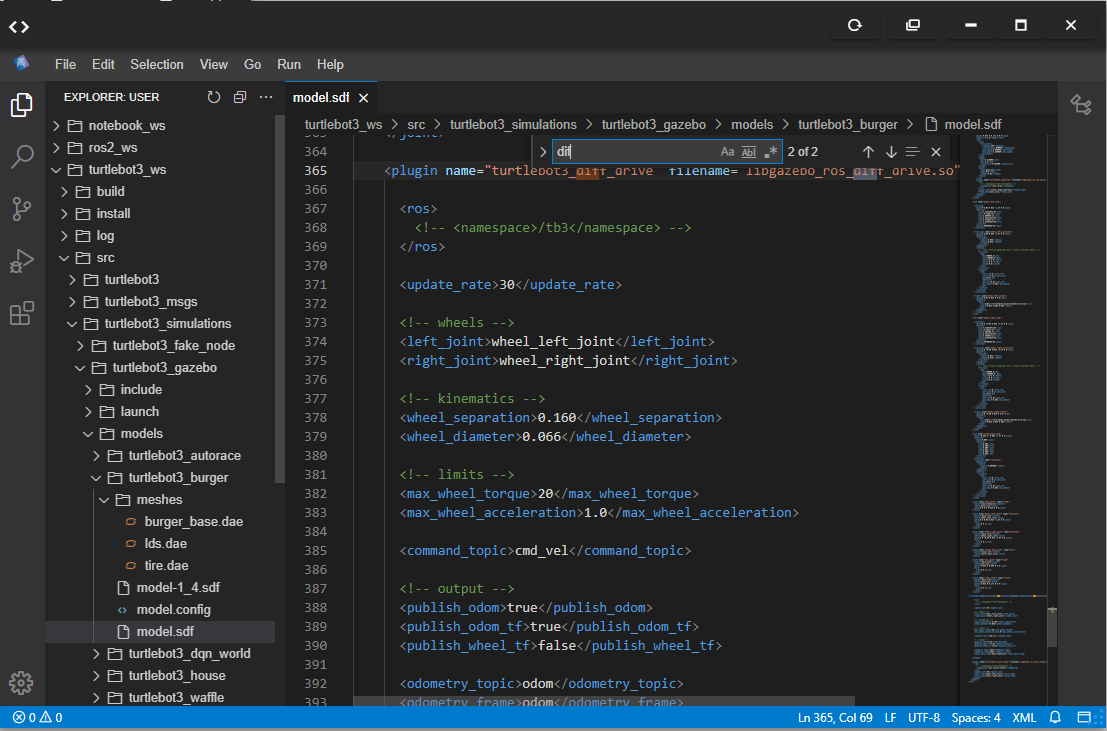
Now, we will find a Gazebo model file with the differential drive plugin. For this post, we’ll use the turtlebot3_ws/src/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_burger/model.sdf file. Sometimes it’s also defined as a .xacro file.
Head over to the Code Editor to explore this file as well as other files.
Open the Code EditorGazebo model file
Let’s examine the differential drive section of this plugin file and compare it with the one on the ROS Answers post.
On lines 385 and 392, we see entries for the /cmd_vel (<command_topic>cmd_vel</command_topic>) and /odom (<odometry_topic>odom</odometry_topic>) topics respectively. However, these entries are missing in the file on ROS Answers.
Well, the topics are there, but are they working? Let’s publish to the /cmd_vel topic and see if the robot moves. We also echo the /odom in another terminal. Run the following in Terminal 2:
The robot didn’t move and nothing was echoing from /odom!
Now we need to confirm that it’s not working because of those tags. Let’s modify the launch command in Terminal 1. Press Ctrl + C to stop the simulation and run the following commands instead:
Now try to move the robot again and check the /odom eching…Poof, both working! Why? We modified the model file for “burger”; the one for “waffle” was intact!
Final confirmation: uncomment the lines in turtlebot3_ws/src/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_burger/model.sdf , stop the simulation in Terminal 1 and run the following commands.
So we have confirmed that the command and odometry tags are necessary.
Step 4: Check your learning
Do you understand how to use the Gazebo differential drive plugin in ROS 2? If you don’t know it yet, please go over the post again, more carefully this time.
(Extra) Step 5: Watch the video to understand how to use the Gazebo differential drive plugin in ROS 2
Here you go:
Feedback
Did you like this post? Do you have any questions about how to use the Gazebo differential drive plugin in ROS 2? Please leave a comment in the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS2 topics, please let us know in the comments area and we will do a video or post about it.
Get ROS2 Industrial Ready- Hands-On Training by The Construct cover.png