This tutorial is created by Robotics Ambassador Eric
Những điều bạn sẽ được biết trong blog này:
Cách cài đặt các packages cần thiết để mô phỏng nhiều robots ở ROS2 Humble
Cách tạo launch file để mô phỏng nhiều robot trên gazebo
Mô phỏng robots trên Rviz và gazebo
Phần 2: https://www.theconstruct.ai/lam-sao-de-mo-phong-nhieu-robot-su-dung-nav2-trong-khong-gian-gazebo-voi-ros2-humble-phan-2-vietnamese-ros2-tutorial/
Khi làm việc với dự án yêu cầu bạn phải kết hợp nhiều robots với nhau để thực hiện một nhiệm vụ nào đó, vấn đề đầu tiên đặt ra là làm sao để có thể mô phỏng được nhiều robot trên một môi trường cụ thể. Do đó, blog này sẽ giúp bạn biết cách thực hiện điều đó. Đây sẽ là phần 1 của blog này với mong muốn sẽ giúp cho các bạn biết cách tạo một launch file để tích hợp nhiều robots và mô phỏng chúng trên Gazebo cùng với Rviz. Tiếp theo đó sẽ là phần 2 sẽ hướng dẫn các bạn sử dụng Nav2 package cùng với nhiều robot trong môi trường Gazebo.
Khởi động rosject
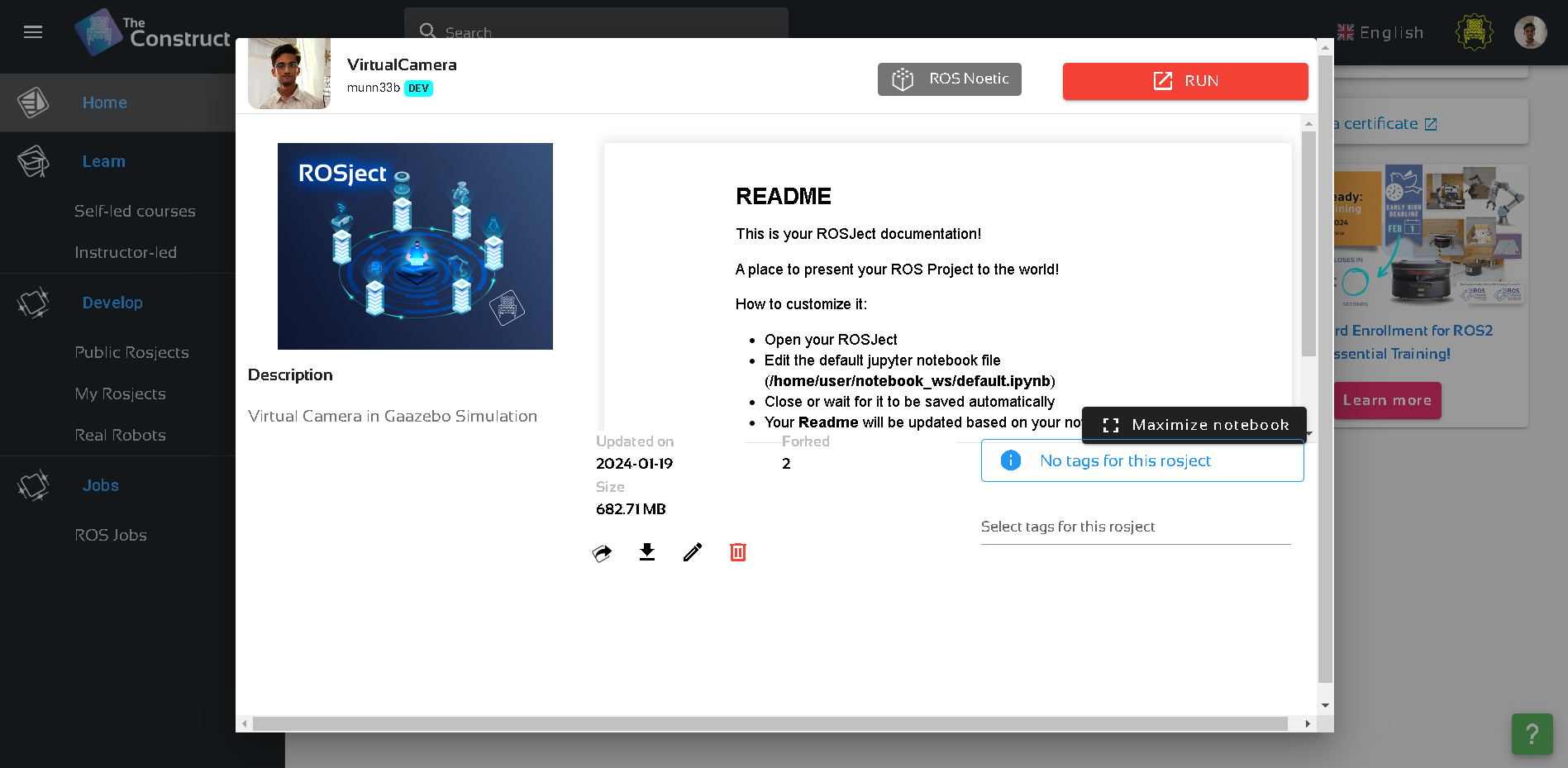
Như mọi lần rosject sẽ là công cụ hoàn hảo cho việc thực hiện project này, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2pGt7Ge
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Cài đặt các package cần thiết
Đầu tiên các bạn cần cài đặt các package cần thiết để có thể thực hiện project này, sau khi vào môi trường làm việc catkin là ros2_ws các bạn làm theo bằng cách thực hiện các câu lệnh sau đây:
Sau bước này thì các bạn sẽ nhìn thấy thông báo cài đặt thành công như hình bên dưới.
https://flic.kr/p/2pGmTxi
Tiếp theo sử dụng câu lệnh sau để build môi trường catkin
colcon build --symlink-install
source ./install/setup.bash
https://flic.kr/p/2pGrq9K
Sau khi tải thành công các bạn sẽ nhìn thấy folder turtlebot3_multi_robot trong src. ở đây sẽ bao gồm các file cần thiết cho project này. Tiếp theo chúng ta sẽ đến mô phỏng và đi sâu vào làm sao để tạo được launch file.
https://flic.kr/p/2pGtH5J
Mô phỏng trên Gazebo cùng nhiều robots
Thông thường khi làm việc với turtlebot3 các bạn luôn phải chọn mô hình robot và truy xuất môi trường cũng như đường dẫn đến package. Tuy nhiên, trong blog này thay vì phải command mỗi lần chạy chương trình. Mình sẽ hướng dẫn các bạn cách khai báo trong launch file để chương trình tự động thực hiện cài đặt.
https://flic.kr/p/2pGtH6f
Sau đó để sử dụng môi trường gazebo và robot, bạn cần truy xuất môi trường gazebo và chạy ros launch package:
Vì chúng ta sẽ mô phỏng không chỉ một mà nhiều robot cùng một lúc nên khi thực hiện câu lệnh chương trình cần một lúc để xử lý được yêu cầu nên các bạn kiên nhẫn nhé.
https://flic.kr/p/2pGmTxy
Mô phỏng trên RViz cùng nhiều robots
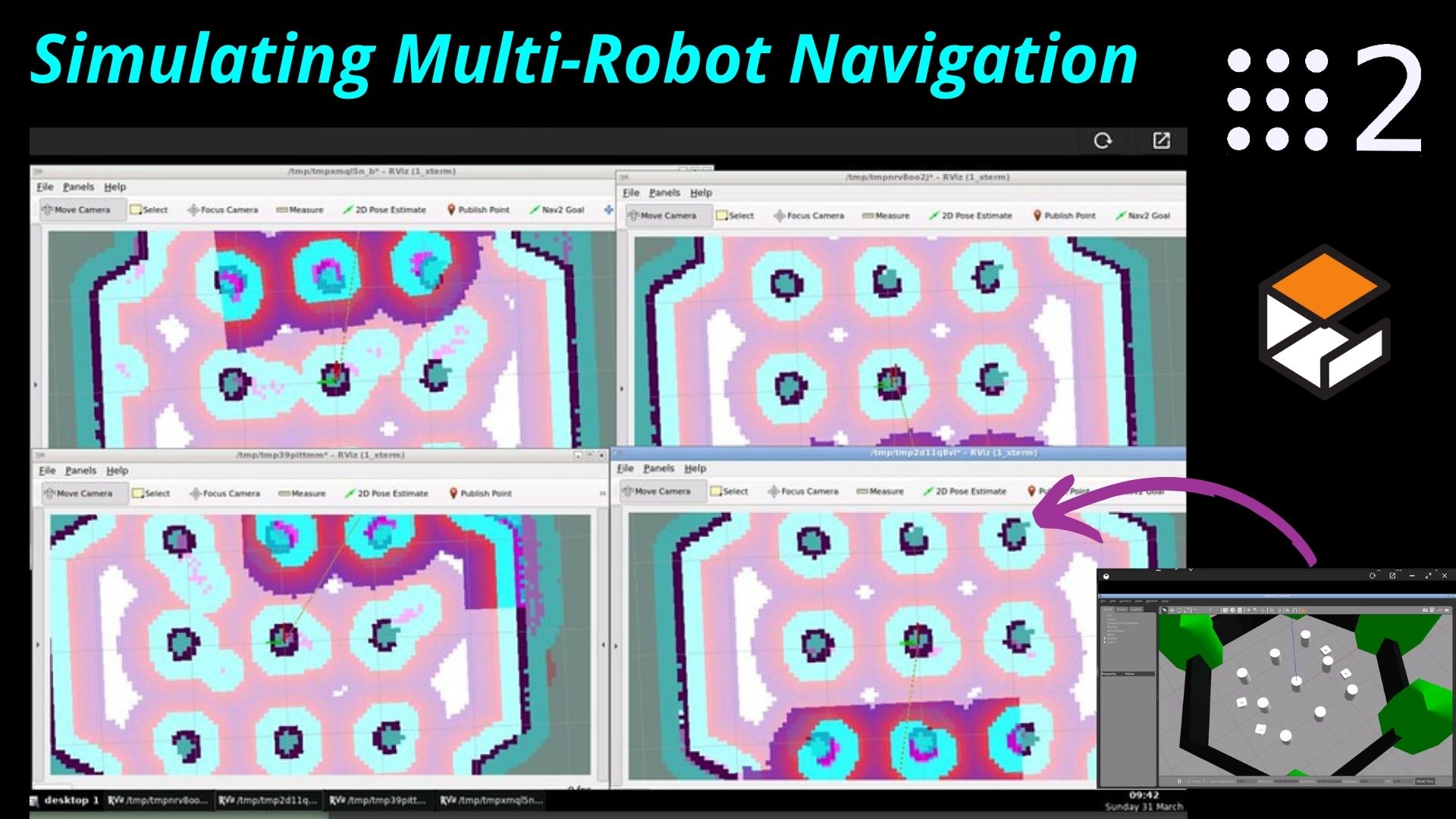
Khi thực hiện ros launch ở trên, 4 cửa sổ Rviz tương ứng với mỗi robot cũng sẽ xuất hiện đồng thời như hifnh dưới. Mỗi cửa sổ đại diện cho một robot.
https://flic.kr/p/2pGst9h
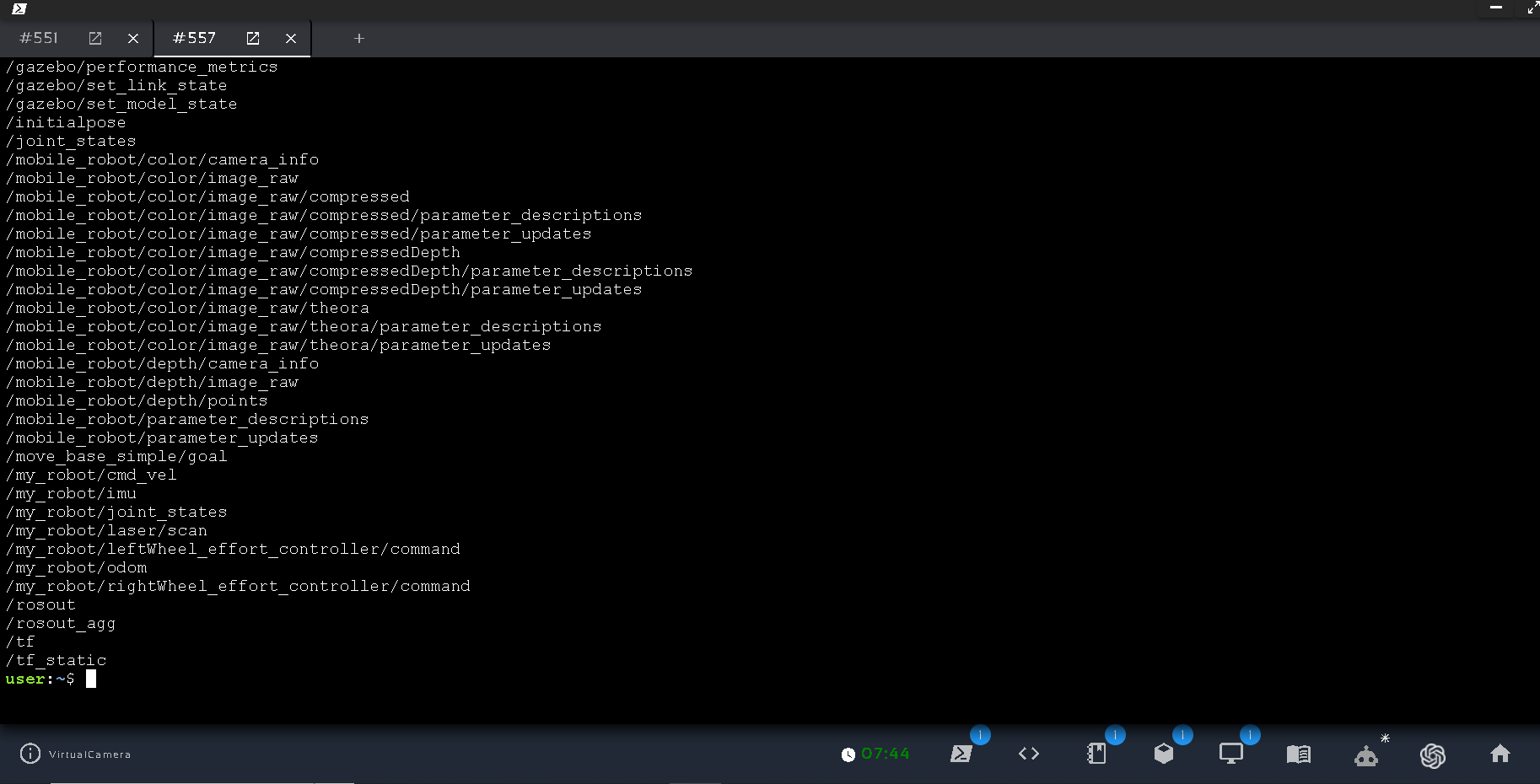
Bên cạnh đó, nếu các bạn kiểm tra ros topic thì các bạn sẽ thấy đầy đủ đồng thời tất cả topic của robot được khai báo (tb1, tb2, tb3, tb4). Từ đây chúng ta có thể áp dụng vào nhiều project sử dụng nhiều robots cùng lúc.
source ~/ros2_ws/install/setup.bash
ros2 topic list
https://flic.kr/p/2pGmTyf
https://flic.kr/p/2pGtH7h
https://flic.kr/p/2pGt7Hw
https://flic.kr/p/2pGtH7C
Cách tạo launch file để mô phỏng nhiều robots cùng lúc
Sau đây, mình sẽ giải thích các phần trong launch file để các bạn tùy ý có thể thay đổi và thực hiện project cho riêng mình.
1. Khởi tạo Gazebo server và client ¶
Để có thể chạy mô phỏng trên Gazebo chúng ta cần khai báo và khởi tạo Gazebo server và client như sau
Khi mô phỏng trên gazebo, chúng ta cần biết vị trí cần bố trí robot hay nói cách khác chúng ta cần khởi tạo tọa độ cho robot trên môi trường gazebo. Để làm việc đó, cách tiếp cận đơn giản là sử dụng hàng và cột để xác định vị trí theo dạng lưới. Với mỗi vị trí trên lưới, nó sẽ tạo ra một tên và không gian duy nhất cho từng robot. Sau đó, tạo và cấu hình nút robot_state_publisher và spawn_entity.py để xuất hiện robot trong gazebo.
Cách sắp xếp tuần tự với trình xử lý sự kiện (Event Handlers)
Chúng ta sửu dụng phương pháp tuần tự để robot xuất hiện, đảm bảo rằng mỗi robot được hoàn toàn trang bị trước khi đến với robot tiếp theo. Điều này được thực hiện thông qua hai chức năng RegisterEventHandler và OnProcessExit để chờ quá trình trước đó được hoàn thành.
Sau khi các robots được hoàn toàn khởi tạo, chúng ta có thể bắt đầu đùng các nút để điều khiển robot dựa trên enable_drive, cho phép điều khiển chuyển động của robots trong môi trường mô phỏng
Đến đây là kết thúc phần 1 của blog này, các bạn có thể theo doxi phần 2 để kết hợp nhiều robots cùng với Nav2 package. Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.
Bem-vindo! Neste tutorial, iremos mergulhar nos recursos de Actions no ROS, com foco no ROS 1 Noetic e em um dos robôs mais encantadores disponíveis na plataforma: o BB-8 do universo de Star Wars. Vamos explorar como usar Actions para enviar comandos personalizados que permitem ao BB-8 executar ações específicas, como caminhar, girar e parar, em resposta a objetivos definidos. Ao longo do processo, você aprenderá a criar mensagens customizadas para interagir com o BB-8 de maneira controlada e divertida.
Abrindo o rosject
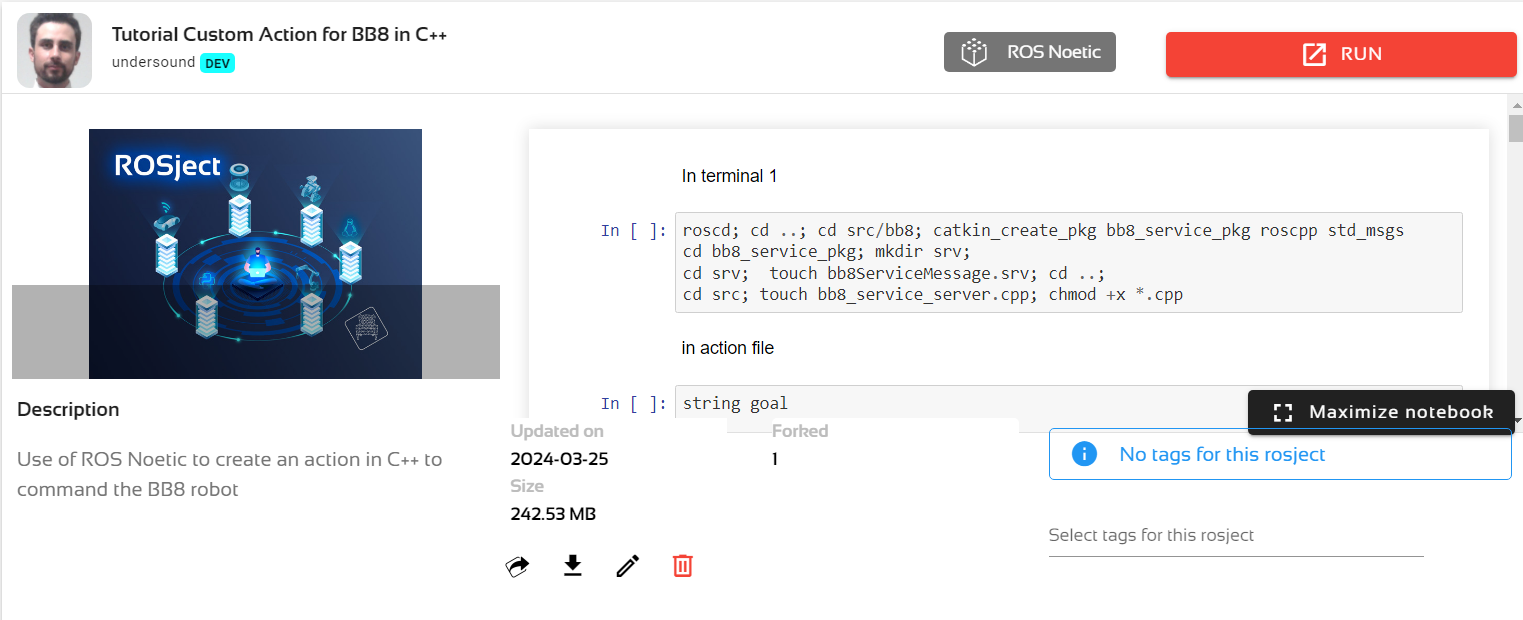
Para acompanhar este tutorial utilize o rosject acessando o link fornecido e clique no botão vermelho
Abra um terminal e cole os comandos abaixo para criar o pacote e os arquivos necessários para a simulação.
roscd; cd ..; cd src/bb8; catkin_create_pkg bb8_action_pkg roscpp actionlib actionlib_msgs geometry_msgs std_msgs
cd bb8_service_pkg; mkdir action;
cd action; touch CustomActionMsg.action; cd ..;
cd src; touch bb8_service_server.cpp; chmod +x *.cpp
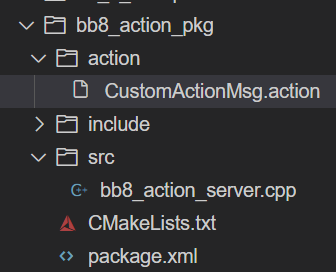
Novos arquivos aparecerão na árvore de pastas em sua IDE.
Configurando as mensagens de Action Mensagens de Action são compostas pelos elementos goal, result e feedback. No caso da nossa aplicação, trataremos cada um dos elementos como uma string diferente. Salve o arquivo CustomActionMsg.action incluindo o seguinte conteúdo:
string goal
---
string result
---
string feedback
Preparando para compilar
Para atualizar seu CMakeList.txt, é crucial copiar o seguinte conteúdo e colá-lo no arquivo, substituindo o que estiver presente.
Agora, vamos para a etapa em que os comandos são enviados ao servidor do ações. No diretório ‘src’, abra o arquivo bb8_action_server.cpp e adicione o seguinte código. #include "geometry_msgs/Twist.h"
#include "nav_msgs/Odometry.h"
#include <actionlib/server/simple_action_server.h>
#include <bb8_action_pkg/CustomActionMsgAction.h>
#include <ros/ros.h>
class MoveAction {
protected:
ros::NodeHandle nh_;
actionlib::SimpleActionServer<bb8_action_pkg::CustomActionMsgAction> as_;
std::string action_name_;
bb8_action_pkg::CustomActionMsgFeedback feedback_;
bb8_action_pkg::CustomActionMsgResult result_;
ros::Publisher pub;
ros::Subscriber sub;
geometry_msgs::Twist mov;
nav_msgs::Odometry odom;
ros::Rate *rate_;
public:
MoveAction(std::string name)
: as_(nh_, name, boost::bind(&MoveAction::Callback, this, _1), false),
action_name_(name) {
as_.start();
rate_ = new ros::Rate(1);
pub = nh_.advertise<geometry_msgs::Twist>("cmd_vel", 1000);
sub = nh_.subscribe("/odom", 1000, &MoveAction::odomCallback, this);
}
void Callback(const bb8_action_pkg::CustomActionMsgGoalConstPtr &goal) {
ROS_INFO("Goal received: %s", goal->goal.c_str());
while (ros::ok() && !as_.isPreemptRequested()) {
if (goal->goal == "walk") {
mov.linear.x = 0.5;
mov.angular.z = 0;
pub.publish(mov);
} else if (goal->goal == "turn") {
mov.linear.x = 0;
mov.angular.z = 1;
pub.publish(mov);
usleep(2000000);
} else if (goal->goal == "stop") {
mov.linear.x = 0;
mov.angular.z = 0;
pub.publish(mov);
}
feedback_.feedback =
"Received position: x=" + std::to_string(odom.pose.pose.position.x) +
", y=" + std::to_string(odom.pose.pose.position.y) +
", z=" + std::to_string(odom.pose.pose.position.z);
as_.publishFeedback(feedback_);
rate_->sleep();
}
if (as_.isPreemptRequested()) {
ROS_INFO("Goal preempted.");
as_.setPreempted();
} else {
ROS_INFO("Goal succeeded.");
result_.result = "Action completed.";
as_.setSucceeded(result_);
}
}
void preemptCallback() {
ROS_INFO("Goal preempted.");
as_.setPreempted();
}
void odomCallback(const nav_msgs::Odometry::ConstPtr &msg) { odom = *msg; }
};
int main(int argc, char **argv) {
ros::init(argc, argv, "node_action");
MoveAction server("action_custom_msg_as");
ros::spin();
return 0;
}
Compilando o pacote e lançando a simulação
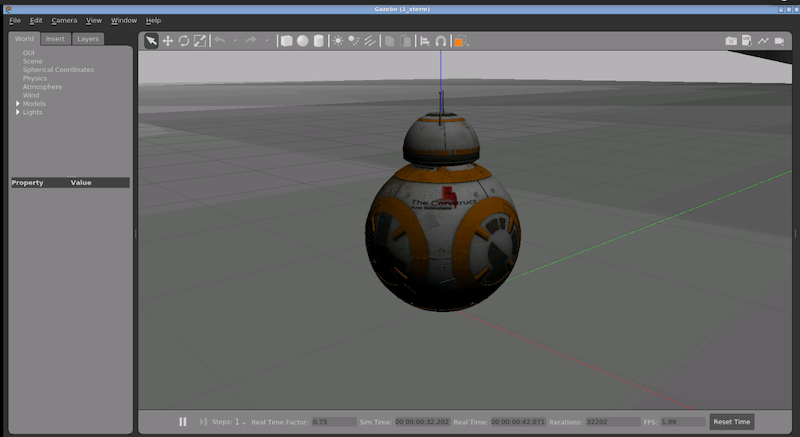
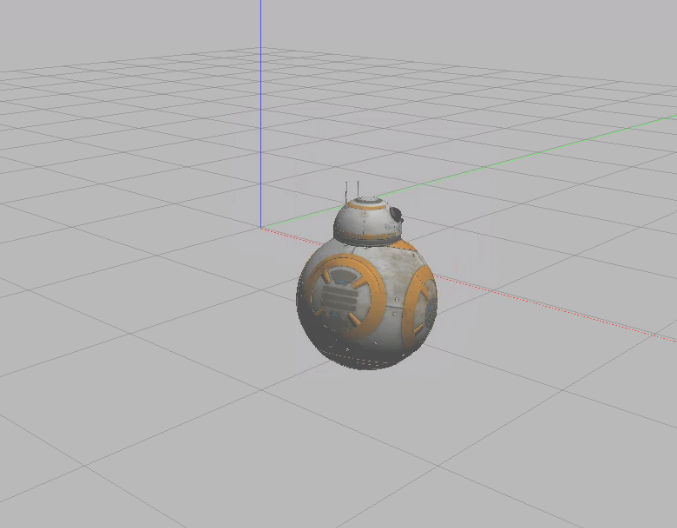
Em um terminal, inicie o Gazebo usando o comando apropriado para visualizar o robô BB-8 pronto para operação. Isso abrirá a janela do Gazebo.
roslaunch bb_8_gazebo main.launch
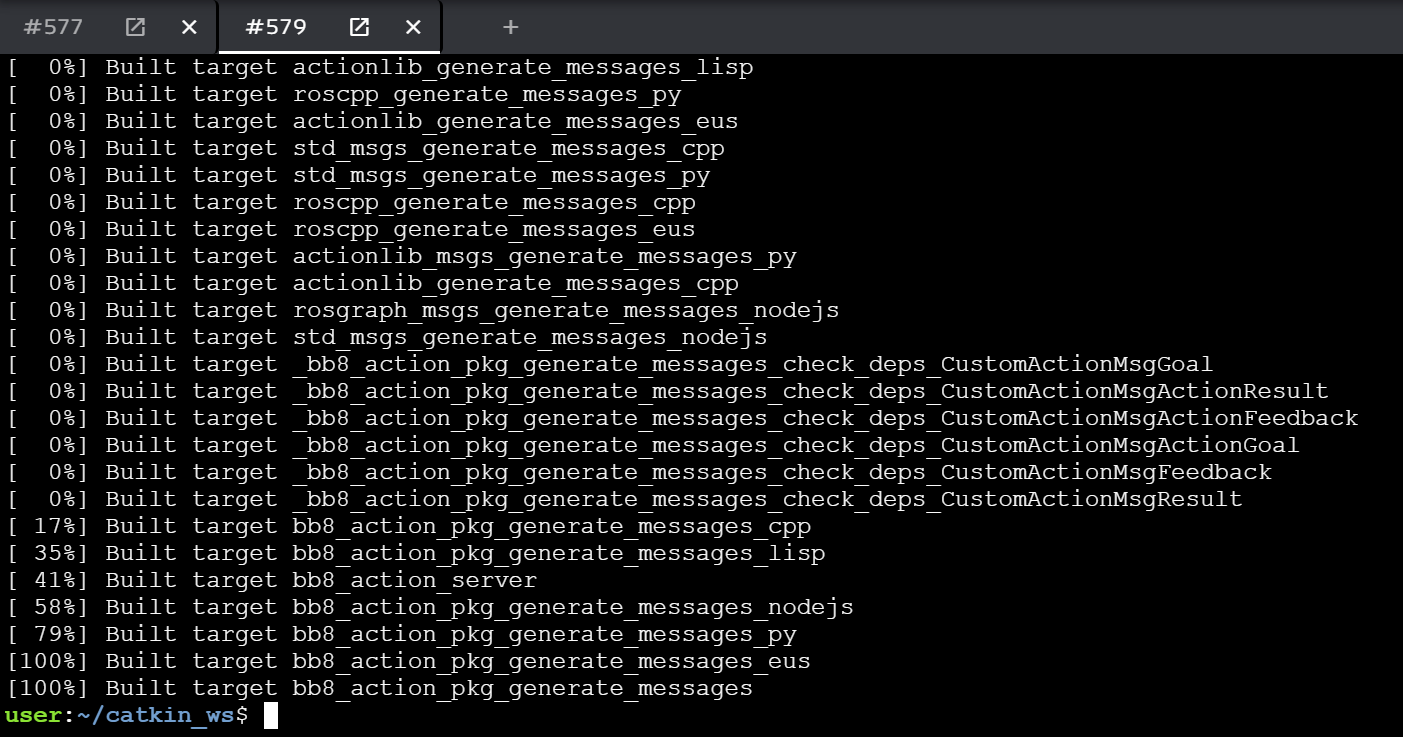
No segundo terminal, execute o seguinte comando para compilar apenas o pacote que criamos. Isso economiza tempo, já que compilará apenas um pacote em vez de todos os existentes.
cd ~/catkin_ws/; catkin_make --only-pkg-with-deps bb8_action_pkg; source devel/setup.bash
Se tudo foi feito corretamente, o prompt não acusará nenhum erro:
Rodando o servidor de serviços
No terminal 3, execute o comando para iniciar o servidor de ações:
rosrun bb8_action_pkg bb8_action_server
Não se preocupe com este terminal, abra um novo para prosseguir com os passos deste tutorial.
Invocando o feedback da ação
Abra um quarto terminal para receber feedback do robô com informações sobre sua localização no espaço tridimensional. Essas atualizações são recebidas a cada dois segundos, permitindo que você saiba a posição do robô mesmo que ele não esteja visível.
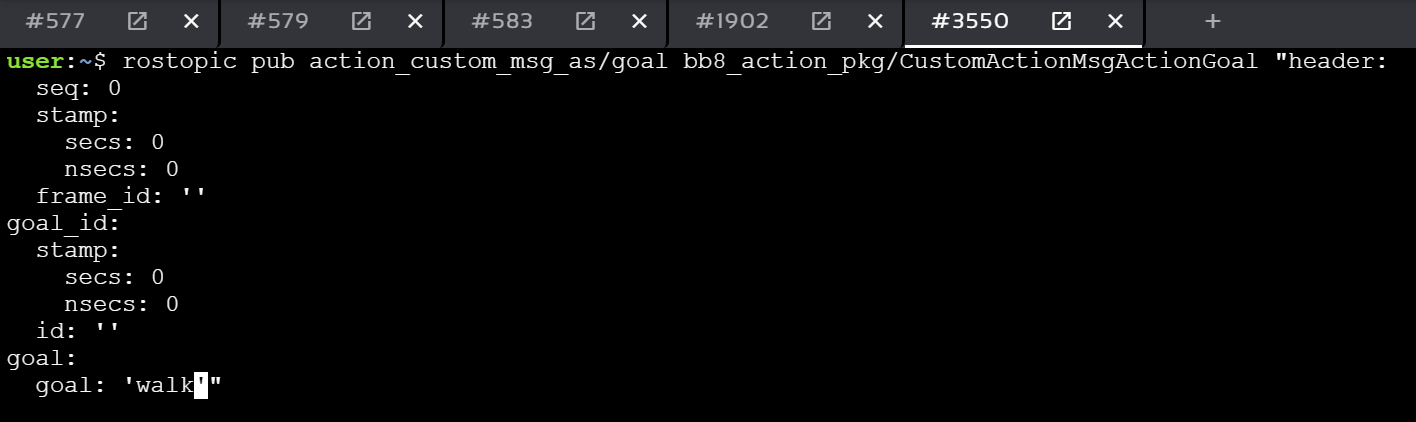
rostopic echo action_custom_msg_as/feedback
Não se preocupe se nada aparecer inicialmente, pois o servidor ainda não está em execução, então não haverá feedback disponível ainda. Isso é normal.
Após digitar o comando, não pressione ‘Enter’. Em vez disso, pressione ‘Tab’ duas vezes para autocompletar com os elementos necessários. Em seguida, você poderá selecionar o goal desejado, como ‘turn’, ‘walk’ ou ‘stop’.”
O robô deve se mover de acordo.
Visualizando o feedback
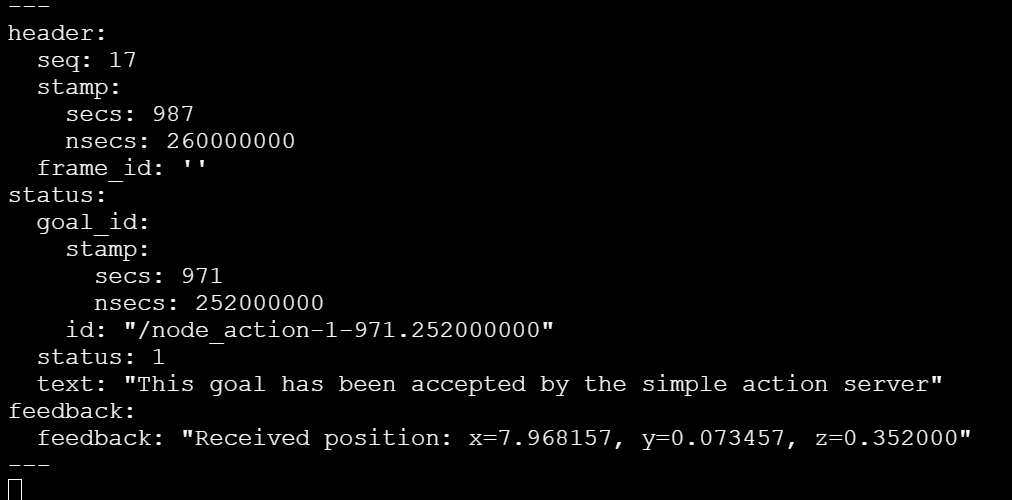
De volta ao terminal 4 temos:
As informações de odometria sempre indicarão onde seu robô está localizado, mesmo que a visualização seja obstruída por um Star Destroyer. Aliás, este método é excelente para explorar e localizar aquela entrada secreta em uma colossal nave inimiga.
Esperamos que este tutorial seja útil e que você se divirta trabalhando com o BB-8, um robô incrível tanto em termos gráficos quanto funcionais.
Vídeo no YouTube
Este foi o post de hoje. Lembre-se que nós temos uma versão deste post em vídeo no YouTube.
Se você gostou do conteúdo, por favor, considere se inscrever no nosso canal do YouTube. Estamos publicando novos conteúdos quase todos os dias.
How to create node in Python to spawn new object in Gazebo Simulation
Overview:
ROS (Robot Operating System) is a de facto standard for Robotics. In order to program Robots, simulation of Real world systems is very important to test and debug the systems. For simulations of Robotics systems, Gazebo is used commonly in ROS. In this post we will learn how to add new objects in simulation scene without terminating the simulation entirely.
In general, if we want to add new object in simulation scene, we have to terminate all running nodes in simulation, edit the World file (description file for simulation in Gazebo). In order to add new objects, without terminating nodes, we can use Gazebo API in Python to spawn new objects in simulation dynamically.
In this course, you’ll cover the foundational concepts needed to start working with ROS 2, as well as more advanced topics, all while engaging in hands-on practice.
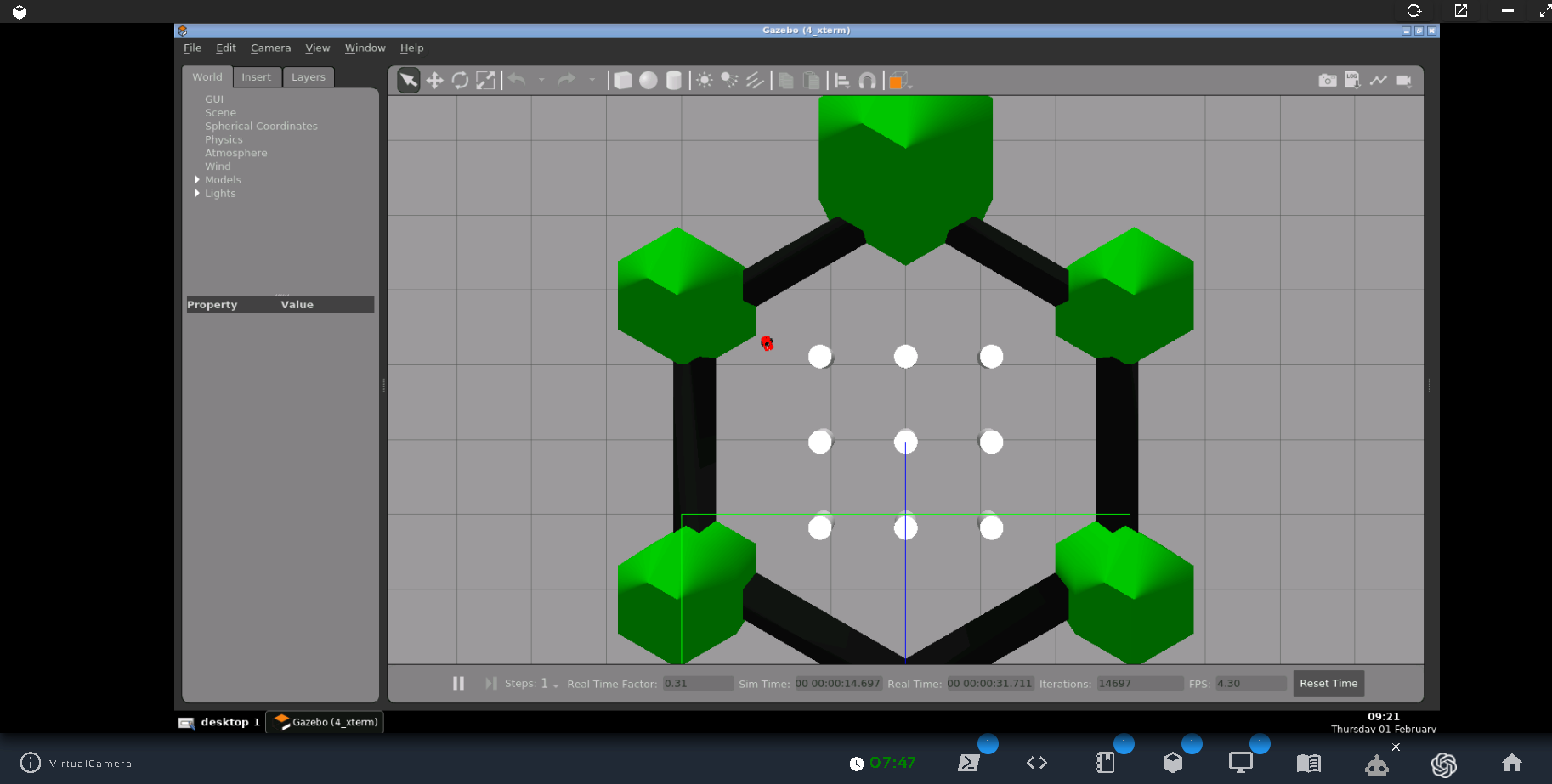
کمپیوٹر ویژن روبوٹکس میں ایک اہم حصہ ہے اور روبوٹکس میں کمپیوٹر ویژن الگورتھم کو لاگو کرنے اور جانچنے کے لیے ہمیں اپنے روبوٹ میں ویژن سینسرز (RGB اور RGB-D کیمروں) کو ضم کرنے کی ضرورت ہے۔ اس پوسٹ میں ہم مصنوعی ماحول کو دیکھنے کے لیے Gazebo Simulation میں اپنے روبوٹ میں مصنوعی RGB-D کیمرہ شامل کرنا سیکھیں گے۔
سمولیشن روبوٹک سسٹمز ٹیسٹنگ میں ایک مربوط حصہ ہے، روبوٹکس سسٹمز کے تمام پہلوؤں کو صحیح طریقے سے جانچنے کے لیے، تمام اجزاء کو سمولیشن میں شامل کیا جانا چاہیے (بشمول سینسر، ایکچویٹرز وغیرہ)۔ Gazebo، روبوٹکس میں بڑے پیمانے پر استعمال ہونے والا سمولیشن سافٹ ویئر ہونے کے ناطے، اس میں بنائے گئے زیادہ تر سینسرز کے لیے تعاون حاصل ہے۔
ROS Inside!
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it, print it, and attach it to your robot. It is really free. Find it in the link below:
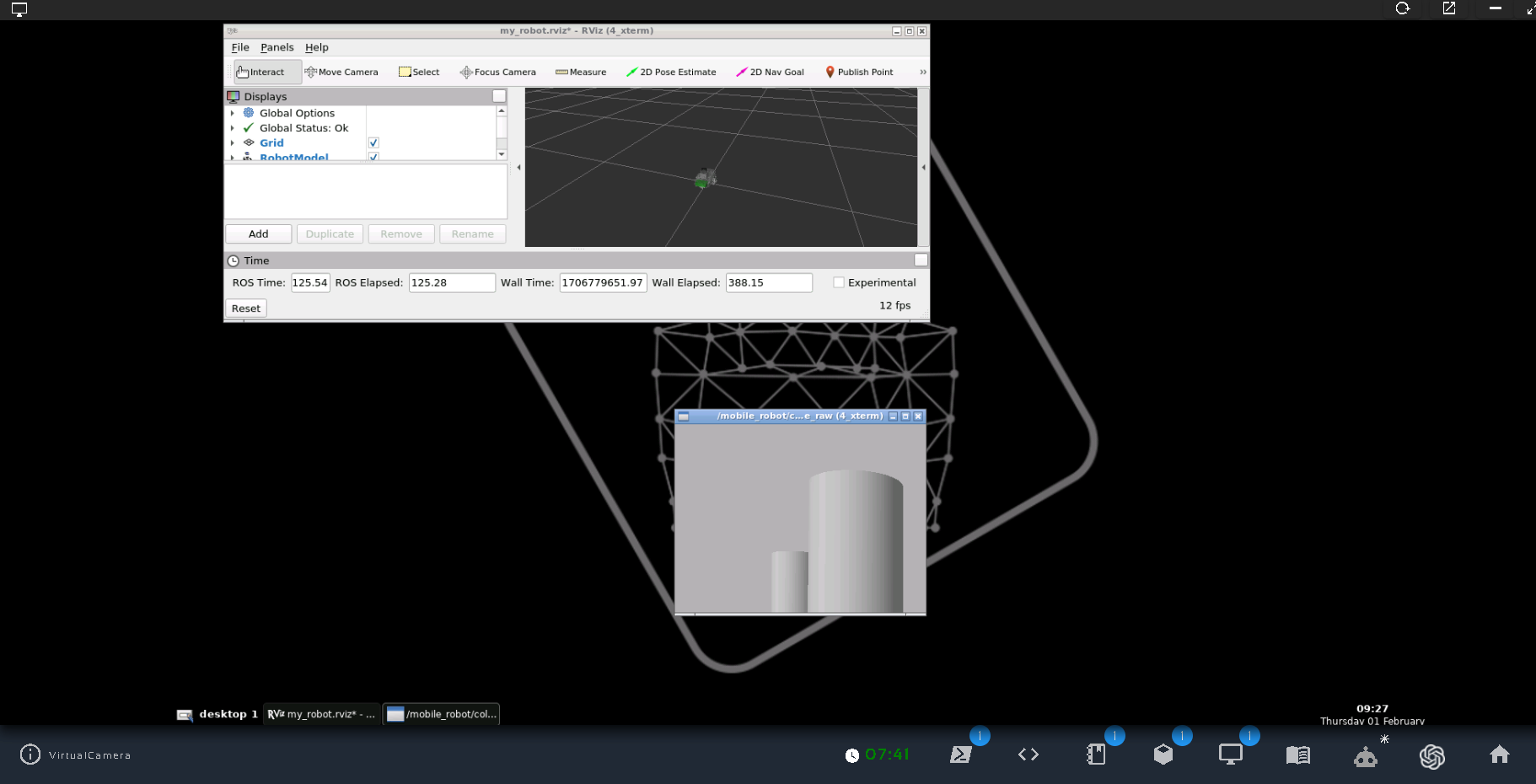
ہم RViz میں پوائنٹ کلاؤڈ ڈیٹا کو بھی دیکھ سکتے ہیں۔ ٹرمینل چلائیں اور ٹائپ کریں:
rosrun rviz rviz
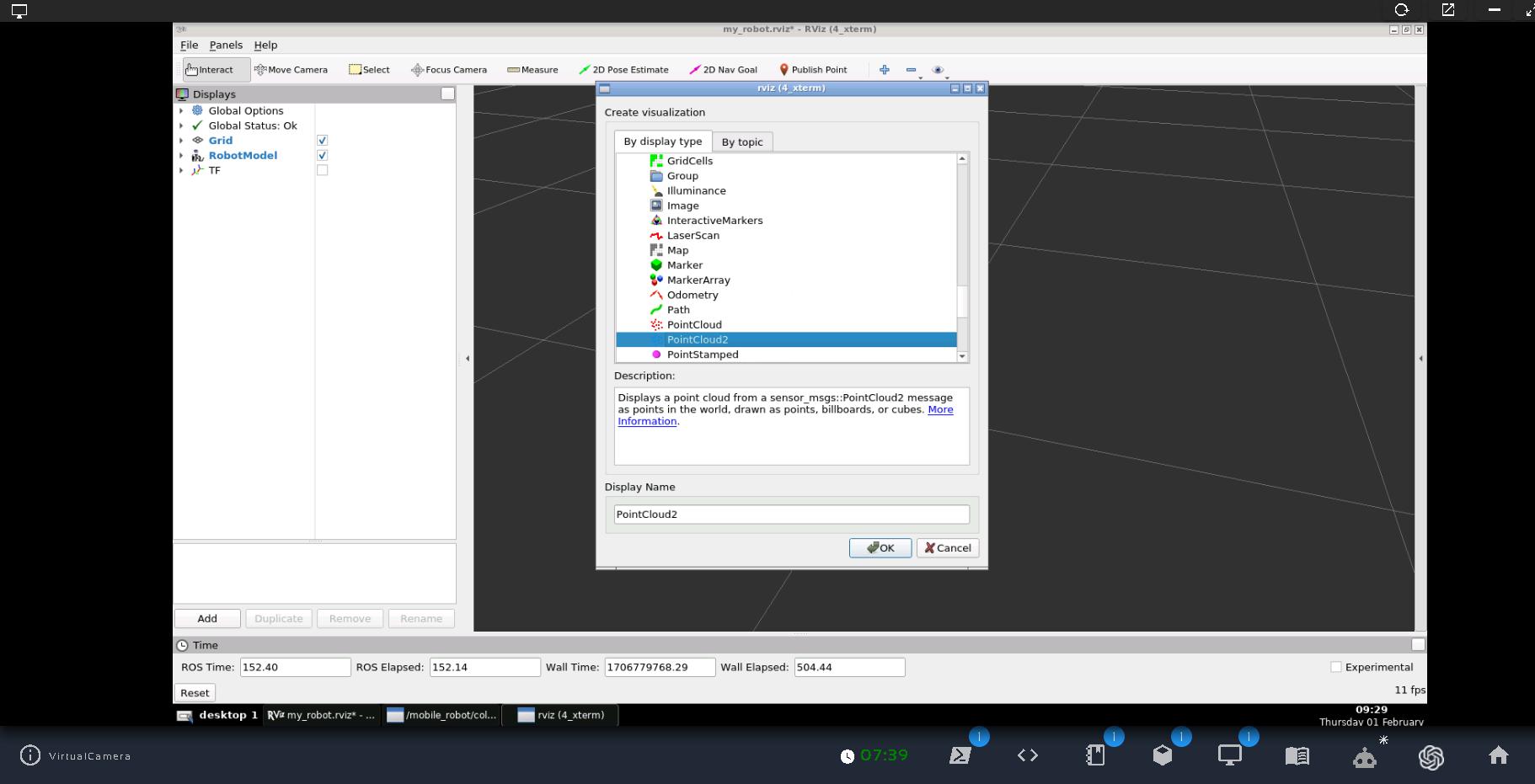
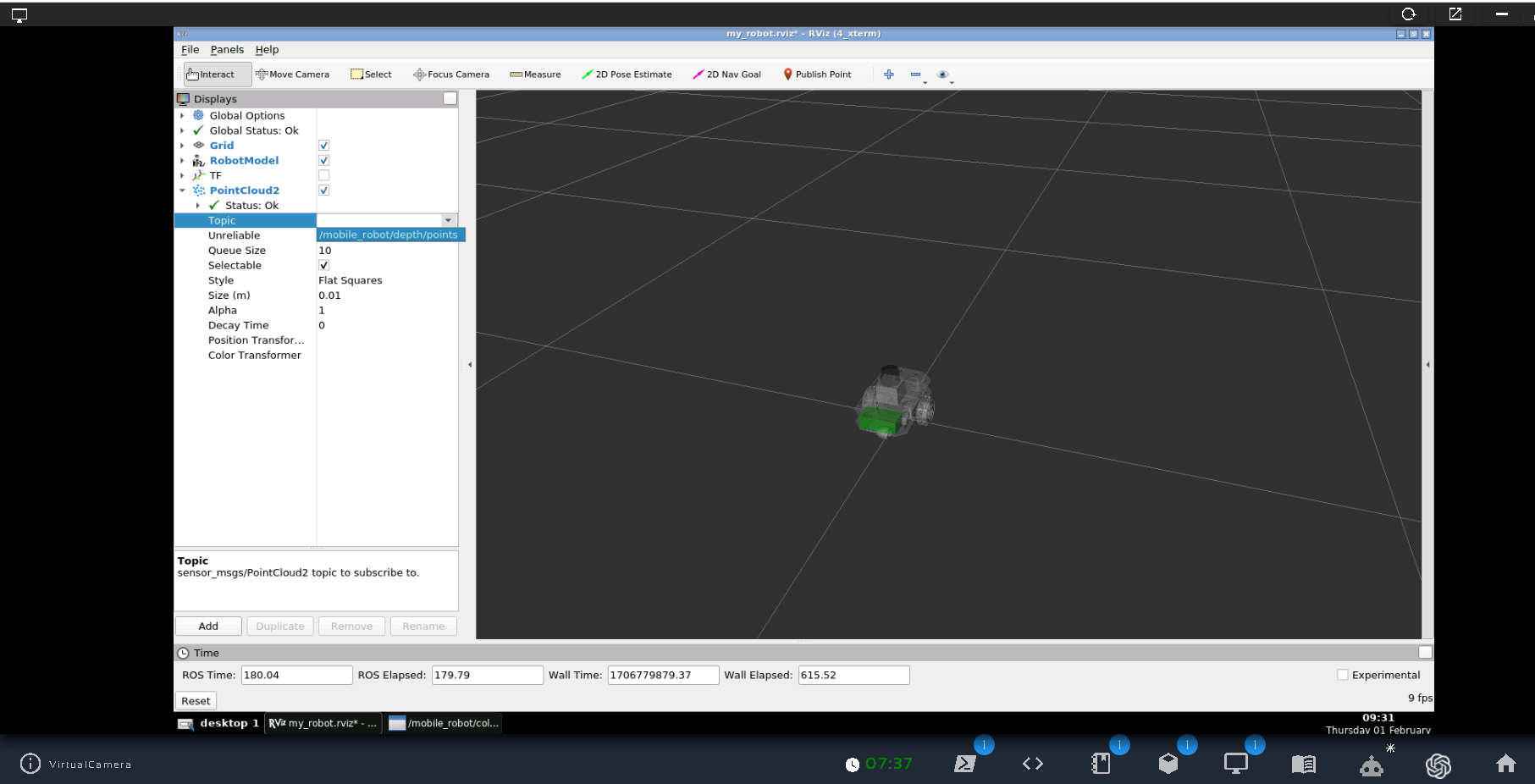
یہ RViz کے ساتھ نئے گرافیکل ٹولز ونڈو کو کھولے گا۔ “شامل کریں” پر کلک کریں اور “پوائنٹ کلاؤڈ 2” فیلڈ شامل کریں۔
اس کے بعد، اس موضوع کو منتخب کریں جس پر پوائنٹ کلاؤڈ ڈیٹا شائع کیا گیا ہے جیسا کہ ذیل کی تصویر میں دکھایا گیا ہے۔
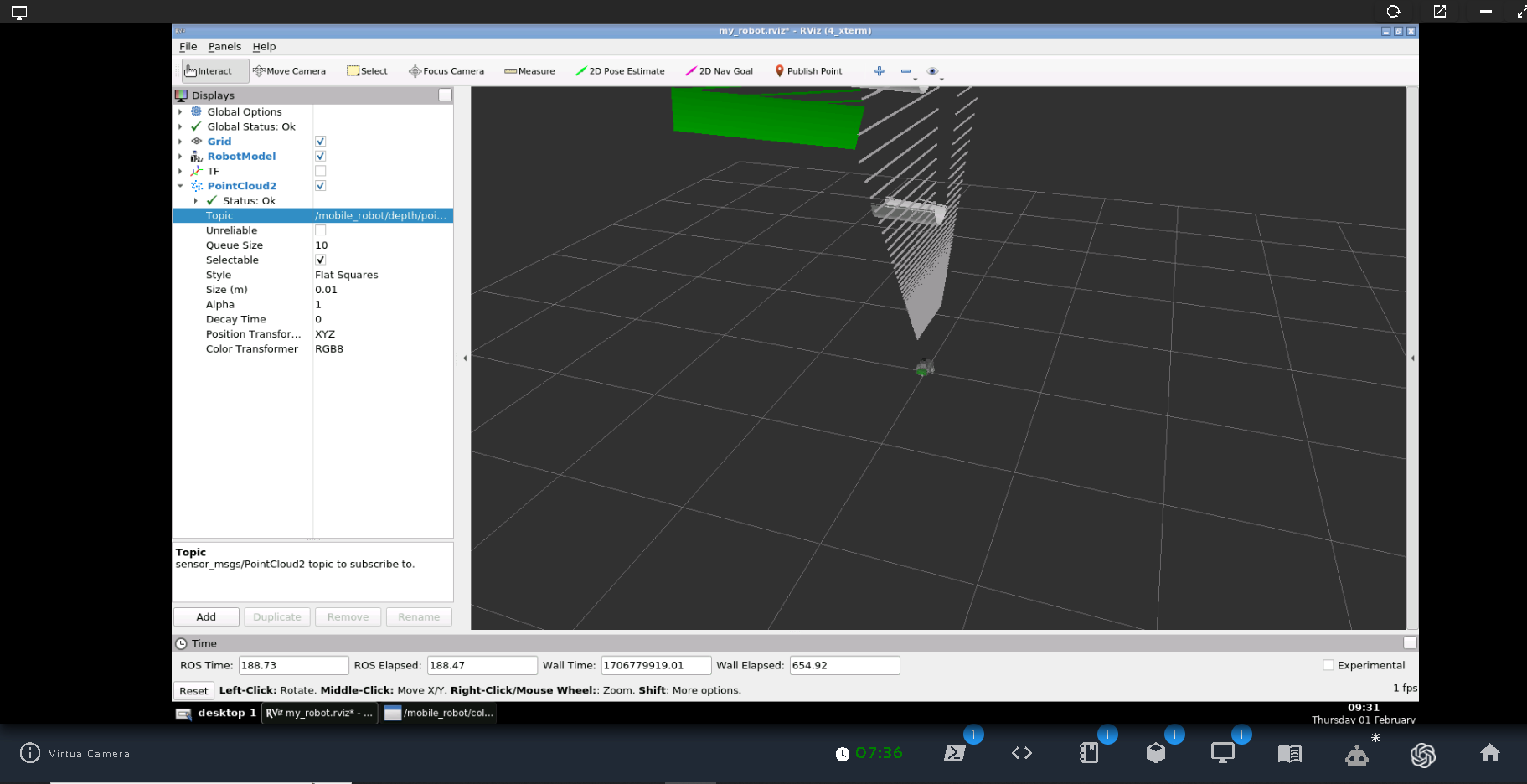
آپ پوائنٹ کلاؤڈ ڈیٹا کو دیکھ سکیں گے جو روبوٹ میں کیمرہ فریم کے میدان میں ہے، مندرجہ ذیل ہے۔
حتمی خیالات:
اب جب کہ ہمارے پاس گیزبو ماحول میں اپنے روبوٹ سمولیشن میں کیمرہ فیڈ موجود ہے، ہم اسے مختلف کاموں کو انجام دینے کے لیے استعمال کر سکتے ہیں جیسے کہ کمپیوٹر وژن، آبجیکٹ کا پتہ لگانے، سیمنٹک سیگمنٹیشن، اور لوکلائزیشن وغیرہ۔ یہ بھی نوٹ کریں کہ RViz میں پوائنٹ کلاؤڈ ڈیٹا غلط ہے۔ واقفیت. اس کو حل کرنے کے لیے ہمیں بیس لنک سے کیمرہ لنک میں کچھ سٹیٹک ٹرانسفارمز شامل کرنے ہوں گے (ہم آنے والی پوسٹس میں دیکھیں گے)۔
While many examples demonstrate how to spawn Gazebo robots using Python launch files, in this post, we will be learning how to achieve the same result using XML launch files. Let’s get started!
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/56476c77/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
How to spawn a Gazebo robot using XML launch files – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Compiling the workspace
As you may already know, instead of using a real robot, we are going to use a simulation. In order to spawn that simulated robot, we need to have our workspace compiled, and for that, we need a terminal.
Let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Once inside the first terminal, let’s run the commands below, to compile the workspace
cd ~/ros2_ws
colcon build
source install/setup.bash
There may be some warning messages when running “colcon build”. Let’s just ignore those messages for now.
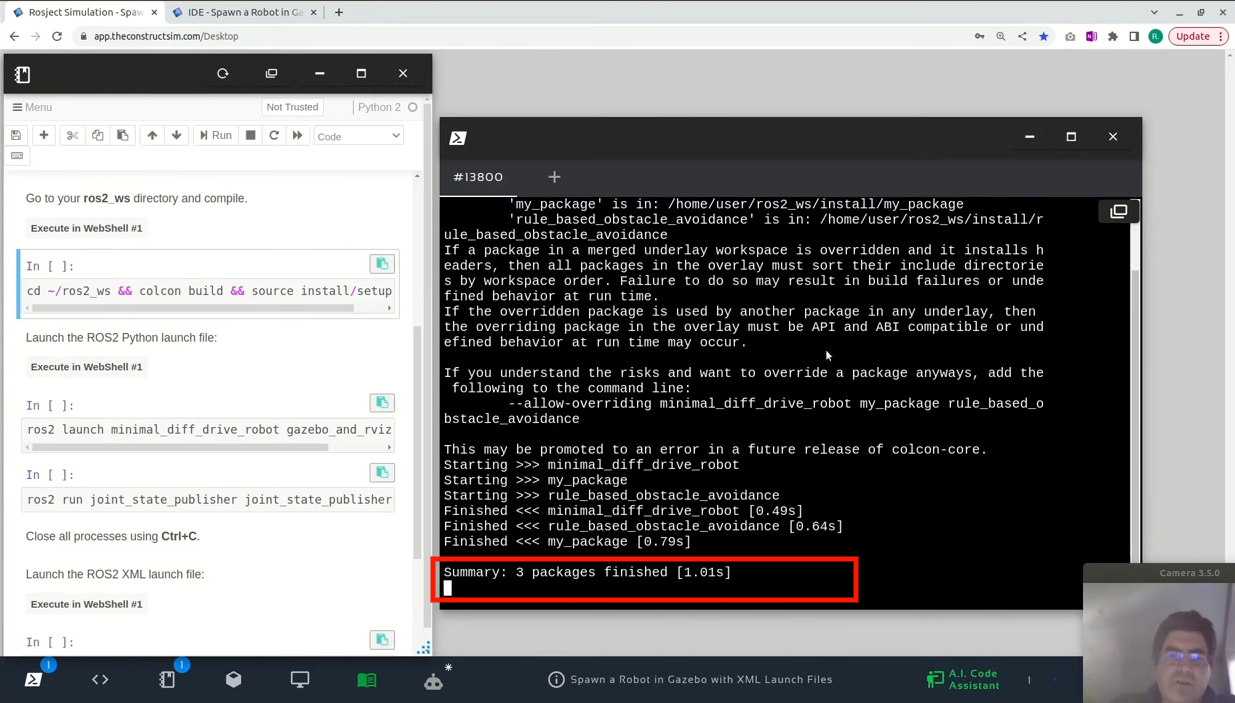
If everything went well, you should have a message saying that 3 packages were compiled:
How to spawn a Gazebo robot using XML launch files – ros2_ws compiled
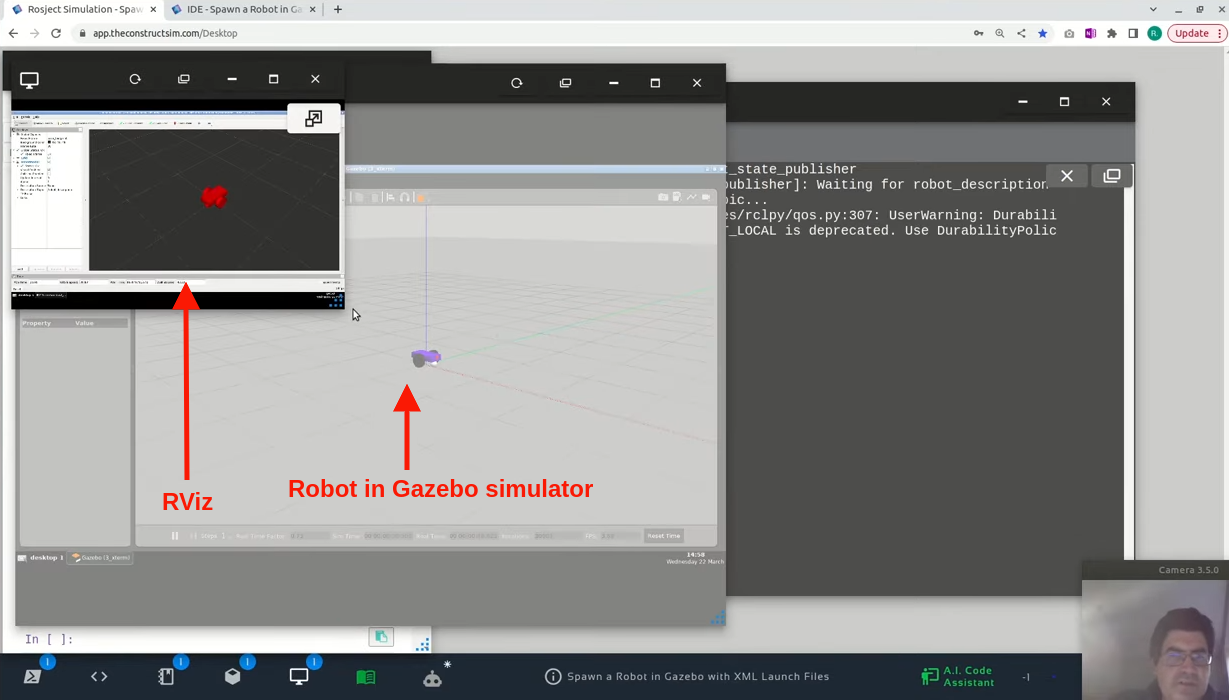
Starting the Gazebo simulator
Now that our workspace is compiled, let’s run a gazebo simulation and RViz using normal python launch files.
For that, run the following command in the terminal:
To make sure everything is working as expected so far, you can also run a new command to move the robot around using the keyboard. For that, open a third terminal, and run the following command:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Now, to move the robot around just press the keys “i“, “k“, or other keys presented in the terminal where you launched the teleop_twist_keyboard command.
The XML file for launching spawning the robot
As we mentioned earlier, the code for the python launch file can be found seen with:
If we check carefully the output above, we can see that we start launching the Gazebo simulator, and in the same <group> we spawn the robot in Gazebo by calling spawn_entity.py
Then we launch the Robot State Publisher to be able to see the robot in RViz, and finally, we launch RViz itself.
When launching RViz, we tell it to use a file named config/robot.rviz, as we can see at:
Now, in the second terminal, let’s launch the Joint State Publisher to be able to correctly see the robot wheels in RViz:
ros2 run joint_state_publisher joint_state_publisher
And on the third terminal, you can start the command to move the robot around:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
And that is basically it
Congratulations. Now you know how to spawn a robot in Gazebo using Python and also using XML launch files.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses: