This tutorial is created by Robotics Ambassador Eric
Những điều bạn sẽ được biết trong blog này:
Cách cài đặt các packages cần thiết để mô phỏng nhiều robots ở ROS2 Humble
Cách tạo launch file để mô phỏng nhiều robot trên gazebo
Mô phỏng robots trên Rviz và gazebo
Phần 2: https://www.theconstruct.ai/lam-sao-de-mo-phong-nhieu-robot-su-dung-nav2-trong-khong-gian-gazebo-voi-ros2-humble-phan-2-vietnamese-ros2-tutorial/
Khi làm việc với dự án yêu cầu bạn phải kết hợp nhiều robots với nhau để thực hiện một nhiệm vụ nào đó, vấn đề đầu tiên đặt ra là làm sao để có thể mô phỏng được nhiều robot trên một môi trường cụ thể. Do đó, blog này sẽ giúp bạn biết cách thực hiện điều đó. Đây sẽ là phần 1 của blog này với mong muốn sẽ giúp cho các bạn biết cách tạo một launch file để tích hợp nhiều robots và mô phỏng chúng trên Gazebo cùng với Rviz. Tiếp theo đó sẽ là phần 2 sẽ hướng dẫn các bạn sử dụng Nav2 package cùng với nhiều robot trong môi trường Gazebo.
Khởi động rosject
Như mọi lần rosject sẽ là công cụ hoàn hảo cho việc thực hiện project này, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2pGt7Ge
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Cài đặt các package cần thiết
Đầu tiên các bạn cần cài đặt các package cần thiết để có thể thực hiện project này, sau khi vào môi trường làm việc catkin là ros2_ws các bạn làm theo bằng cách thực hiện các câu lệnh sau đây:
Sau bước này thì các bạn sẽ nhìn thấy thông báo cài đặt thành công như hình bên dưới.
https://flic.kr/p/2pGmTxi
Tiếp theo sử dụng câu lệnh sau để build môi trường catkin
colcon build --symlink-install
source ./install/setup.bash
https://flic.kr/p/2pGrq9K
Sau khi tải thành công các bạn sẽ nhìn thấy folder turtlebot3_multi_robot trong src. ở đây sẽ bao gồm các file cần thiết cho project này. Tiếp theo chúng ta sẽ đến mô phỏng và đi sâu vào làm sao để tạo được launch file.
https://flic.kr/p/2pGtH5J
Mô phỏng trên Gazebo cùng nhiều robots
Thông thường khi làm việc với turtlebot3 các bạn luôn phải chọn mô hình robot và truy xuất môi trường cũng như đường dẫn đến package. Tuy nhiên, trong blog này thay vì phải command mỗi lần chạy chương trình. Mình sẽ hướng dẫn các bạn cách khai báo trong launch file để chương trình tự động thực hiện cài đặt.
https://flic.kr/p/2pGtH6f
Sau đó để sử dụng môi trường gazebo và robot, bạn cần truy xuất môi trường gazebo và chạy ros launch package:
Vì chúng ta sẽ mô phỏng không chỉ một mà nhiều robot cùng một lúc nên khi thực hiện câu lệnh chương trình cần một lúc để xử lý được yêu cầu nên các bạn kiên nhẫn nhé.
https://flic.kr/p/2pGmTxy
Mô phỏng trên RViz cùng nhiều robots
Khi thực hiện ros launch ở trên, 4 cửa sổ Rviz tương ứng với mỗi robot cũng sẽ xuất hiện đồng thời như hifnh dưới. Mỗi cửa sổ đại diện cho một robot.
https://flic.kr/p/2pGst9h
Bên cạnh đó, nếu các bạn kiểm tra ros topic thì các bạn sẽ thấy đầy đủ đồng thời tất cả topic của robot được khai báo (tb1, tb2, tb3, tb4). Từ đây chúng ta có thể áp dụng vào nhiều project sử dụng nhiều robots cùng lúc.
source ~/ros2_ws/install/setup.bash
ros2 topic list
https://flic.kr/p/2pGmTyf
https://flic.kr/p/2pGtH7h
https://flic.kr/p/2pGt7Hw
https://flic.kr/p/2pGtH7C
Cách tạo launch file để mô phỏng nhiều robots cùng lúc
Sau đây, mình sẽ giải thích các phần trong launch file để các bạn tùy ý có thể thay đổi và thực hiện project cho riêng mình.
1. Khởi tạo Gazebo server và client ¶
Để có thể chạy mô phỏng trên Gazebo chúng ta cần khai báo và khởi tạo Gazebo server và client như sau
Khi mô phỏng trên gazebo, chúng ta cần biết vị trí cần bố trí robot hay nói cách khác chúng ta cần khởi tạo tọa độ cho robot trên môi trường gazebo. Để làm việc đó, cách tiếp cận đơn giản là sử dụng hàng và cột để xác định vị trí theo dạng lưới. Với mỗi vị trí trên lưới, nó sẽ tạo ra một tên và không gian duy nhất cho từng robot. Sau đó, tạo và cấu hình nút robot_state_publisher và spawn_entity.py để xuất hiện robot trong gazebo.
Cách sắp xếp tuần tự với trình xử lý sự kiện (Event Handlers)
Chúng ta sửu dụng phương pháp tuần tự để robot xuất hiện, đảm bảo rằng mỗi robot được hoàn toàn trang bị trước khi đến với robot tiếp theo. Điều này được thực hiện thông qua hai chức năng RegisterEventHandler và OnProcessExit để chờ quá trình trước đó được hoàn thành.
Sau khi các robots được hoàn toàn khởi tạo, chúng ta có thể bắt đầu đùng các nút để điều khiển robot dựa trên enable_drive, cho phép điều khiển chuyển động của robots trong môi trường mô phỏng
Đến đây là kết thúc phần 1 của blog này, các bạn có thể theo doxi phần 2 để kết hợp nhiều robots cùng với Nav2 package. Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.
Khi làm việc với robots trong các môi trường khác nhau thì bản đồ (map) là một trong những thông tin hữu ích giúp đỡ cho robot có thể định vị tọa độ, cũng như xây dựng phương hướng di chuyển để né tránh chướng ngại vật. Cho nên, trong bài blog sẽ chia sẽ cách để các bạn tạo ra map bằng việc kết hợp các package có sẵn trong ROS2 như turtlebot3, navigation. Bên cạnh đó mình cũng giới thiệu Cartographer một công cụ rất hữu ích sử dụng thuật toán SLAM được ROS tích hợp. Đây là package sẽ hỗ trợ các bạn rất nhiều trong các dự án liên quan tới robot. Tuy nhiên, blog này không đào sâu vào thuật toán SLAM mà chỉ giới thiệu tới các bạn cách cài đặt và một ví dụ về catographer.
Khởi động rosject
The Construct đã tạo ra một công cụ rất hữu ích là rosject, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
https://flic.kr/p/2pujgPJ
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2puiHBB
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Cài đặt các package cần thiết
Đầu tiên các bạn cần cài đặt các package cần thiết để có thể thực hiện project này, ở đây chúng ta sử dụng turtlebot3 và ros2 navigation, cartographer, gazebo:
Sau khi cài đặt thành công các package phía trên. Cuối cùng là cài đặt package liên quan đến turtlebot3. Các bạn có thể cài đặt thông qua câu lệnh dưới đây:
sudo apt install ros-humble-turtlebot3*
https://flic.kr/p/2puhbcb
Mô phỏng trên Gazebo cùng robot
Sau khi đã thành công kiểm tra hoặc cài đặt turtlebot3 trong ROS2, tiếp theo các bạn sẽ mô phỏng robot trên môi trường Gazebo.
Tiếp theo, sau khi đã cài đặt đầy đủ các package cần thiết. Bước tiếp theo bạn cần chọn model robot cho project của bạn. mình sử dụng waffle trong project này:
export TURTLEBOT3_MODEL=waffle
Sau đó để sử dụng môi trường gazebo và robot, bạn thực hiện câu lệnh:
Cửa sổ Gazebo sẽ xuất hiện như trên cùng với robot waffle.
Khởi động Rviz cùng với cartographer
Như bạn thấy môi trường và robot đã có, tiếp theo bắt đầu với SLAM bằng việc sử dụng cartographer package. Ở cửa sổ thứ 2, các bạn thực hiện câu lệnh này, tuy nhiên khi mở cửa sổ mới đồng nghĩa với việc môi trường làm việc ko thể nhớ loại robot nào bạn đang dùng nên bạn cần export mỗi lần mở cửa sổ mới nhé:
Ở đây mình có thêm vào use_sim_time vì dùng thời gian thực của gazebo nếu như chúng ta làm việc với robot thực thì các bạn ko cần sử dụng use_sim_time. Ở đây sau khi thực hiện câu lệnh, RVIZ sẽ xuất hiện với môi trường grid map, ở đây là mô phỏng 2D từ gazebo qua, bạn có thể tùy chỉnh các lựa chọn ở mục bên trái của RVIZ để có được trải nghiệm tốt hơn về mô phỏng.
https://flic.kr/p/2pujgL7
Tạo và lưu bản đồ cùng nav2_map_server
Như các bạn đã biết, để có một bản đồ hoàn chỉnh hay còn gọi là môi trường đã biết trước, robot cần nhận biết hết các sự kiện trong môi trường. Cho nên trong project này, mình sẽ điều khiển robot di chuyển bằng cách sử dụng teleop_keyboard để robot có thể sử dụng cảm biến nhận diện môi trường xung quanh. Đầu tiên, các bạn cần đồng nhất mẫu robot mà bạn đang sử dụng trong môi trường gazebo cũng như Rviz. Tiếp theo là sử dụng turtlebot3_teleop package để di chuyển robot. Dưới đây là các câu lệnh để thực hiện:
export TURTLEBOT3_MODEL=waffle
ros2 run turtlebot3_teleop teleop_keyboard
https://flic.kr/p/2puhbcM
Ở đây, với mong muốn từng khu vực hay chướng ngại vật sẽ được thể hiện rõ trên map nên các bạn cố gắng di chuyển robot đến những khu vực đó.
https://flic.kr/p/2pujgPo
Như các bạn đã thấy, mình đã di chuyển robot để có thể quét hết toàn bộ bản đồ của môi trường. Bản đồ sẽ thể hiện rõ như hình trên. Các bạn mở cho mình một cửa sổ khác và lưu map lại nhé, bằng việc sử dụng câu lệnh sau:
ros2 run nav2_map_server map_saver_cli -f turtlebot_map
https://flic.kr/p/2puiHBg
Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.
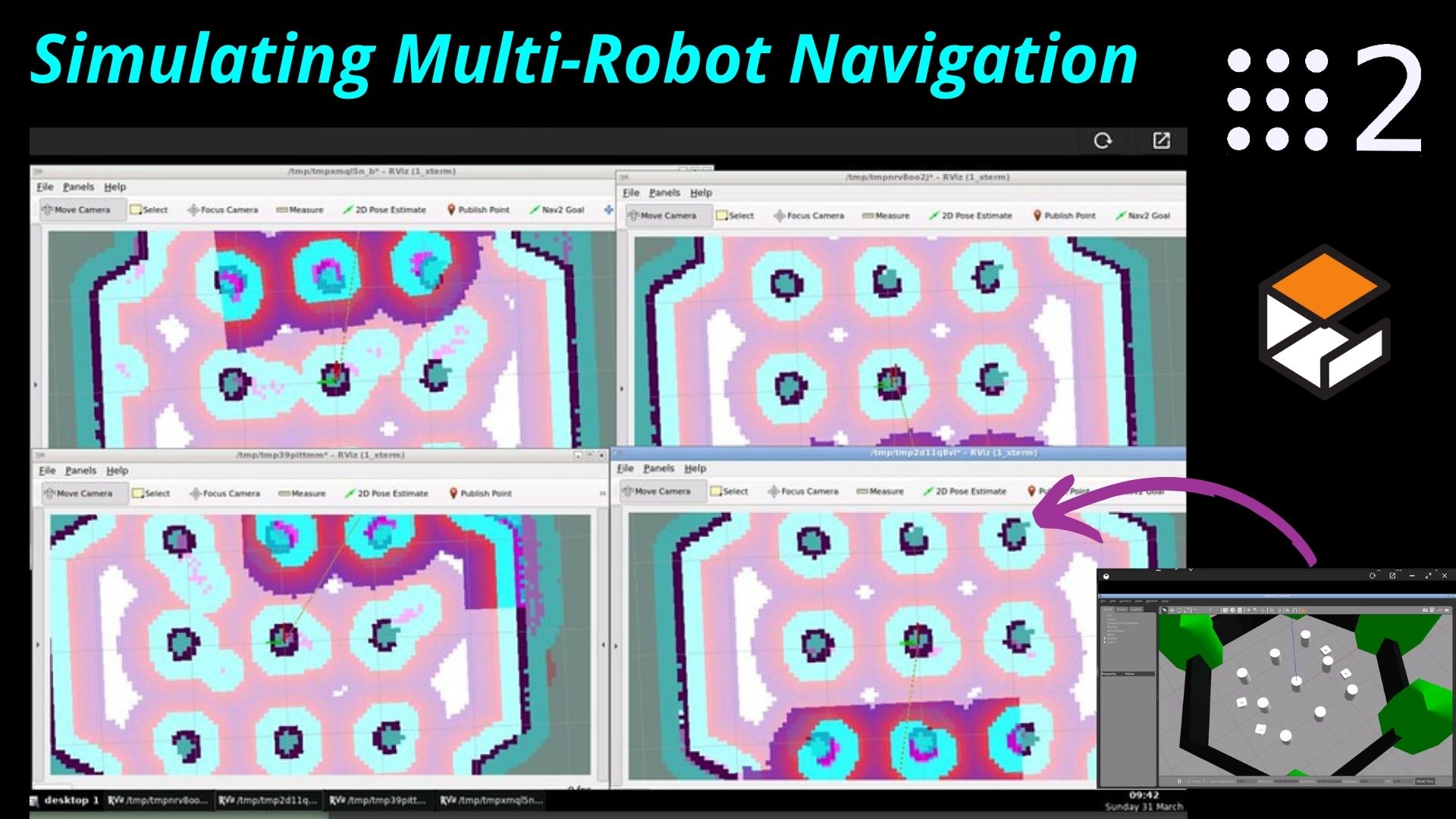
In this post, we’ll be learning how to use nav2 SImple Command API to write a program that makes your program follow waypoints.
What we are going to create is something like a patroling system, in which the robot patrols a given area.
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/4da61f89/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
How to follow waypoints using nav2 – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Launching the simulation
As you may imagine, instead of using a real robot, we are going to use a simulation. The simulation package we are using, neo_simulation2 (by Neobotix), comes along with all the new ROS 2 features.
Like its predecessor, the neo_simulation2 package is fully equipped with all the Neobotix robots that are available in the market.
By the way, Neobotix is a state-of-the manufacturer of mobile robots and robot systems. We offer robots and manipulators for all applications with full ROS support. Neobotix products range from small mobile robots to mobile robot arms and several omnidirectional robots. They are specialized in designing customized mobile robots to meet your unique requirements.
Combining the novelty of ROS 2 and the state-of-the-art Neobotix platforms would allow users to learn and develop various reliable and robust application that caters to their needs in both research and as well as in industries.
Alright, having opened the rosject and explained a little bit about Neobotix, let’s start running some commands in the terminal. For that, let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Once inside the first terminal, let’s run the commands below, to launch a simulation
cd ros2_ws
source install/setup.bash
ros2 launch neo_simulation2 simulation.launch.py
There will be countless red error messages on this simulation terminal. Let’s just ignore those messages for now.
If you want to know a bit more about Neobotix robots, they offer:
In order to move the robot to a desired goal location, pre-defined controllers and planners are available to be readily used. Thanks to Navigation 2, the all-new ROS-2 navigation stack, provides us with localization, global planning, and local planning algorithms, that allow us to jump-start by testing our intended application on the robot real-quick.
Almost all the algorithms found in move_base (ROS-1 Navigation stack) are available in Navigation2. All the Neobotix robots in the simulation for ROS-2 are primed and ready with Navigation2.
Once the simulation is started (seen in the previous tutorial), ROS-2 navigation stack can be launched using the following command
Now, in a second terminal, we can launch the Localization Server using the following command:
The commands above should have launched the simulation, Localization Server, and Path Planner server.
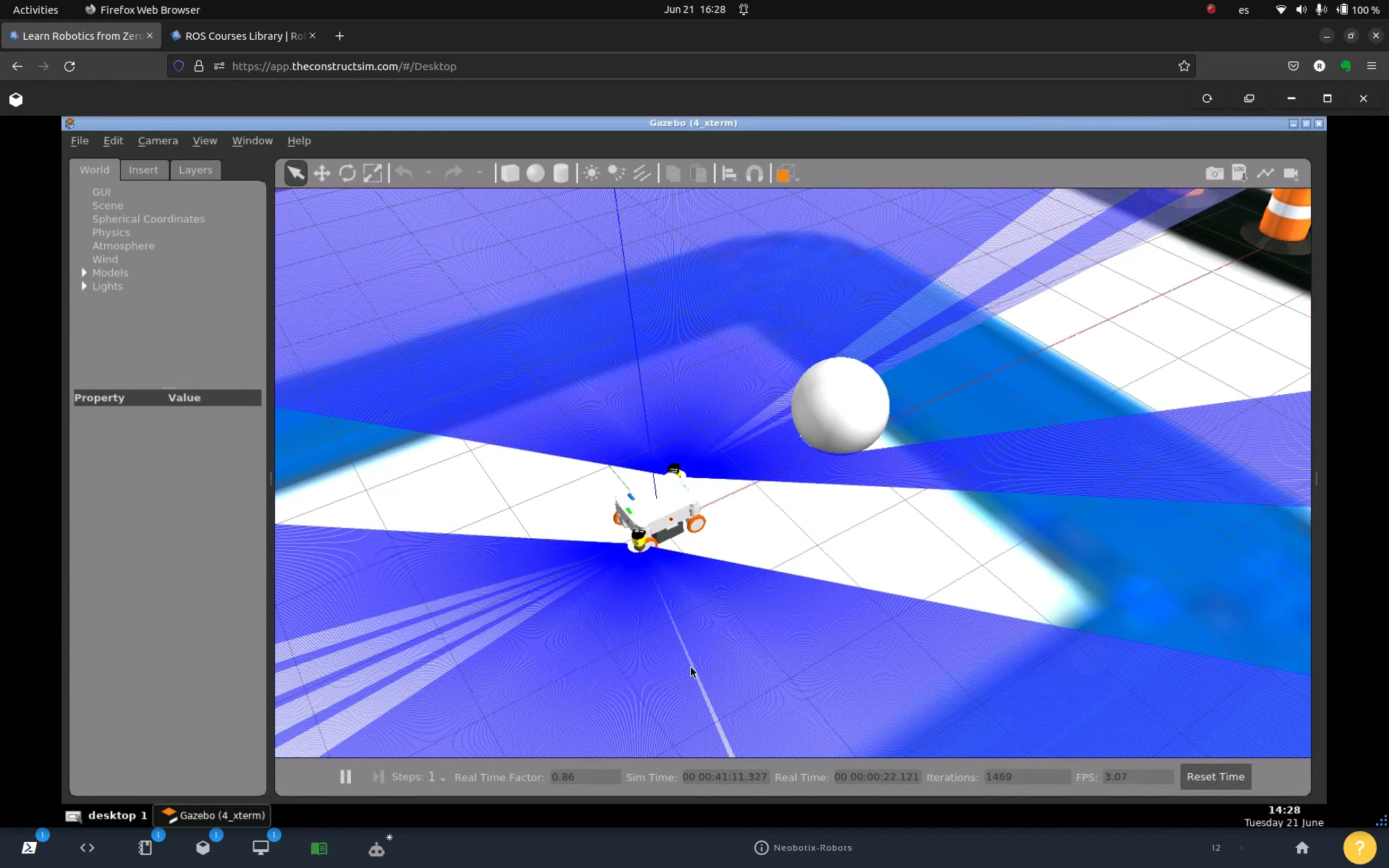
After some seconds, we should have Gazebo (simulation), RViz (Robot Visualization), and Teleop running now. The simulation should be similar to the following:
Simulation – How to follow waypoints using nav2
If the Gazebo simulation doesn’t pop up:
Please open the Gazebo from the below menu bar
RViz would have been loaded as well and can be found in the Graphical tools
Also, another terminal would have popped out in the Graphical tools for the teleoperation. Please follow the instruction given in that terminal for moving the robot.
To make sure everything is working so far, you can send a 2D NavGoal in RViz to make sure the navigation system is working.
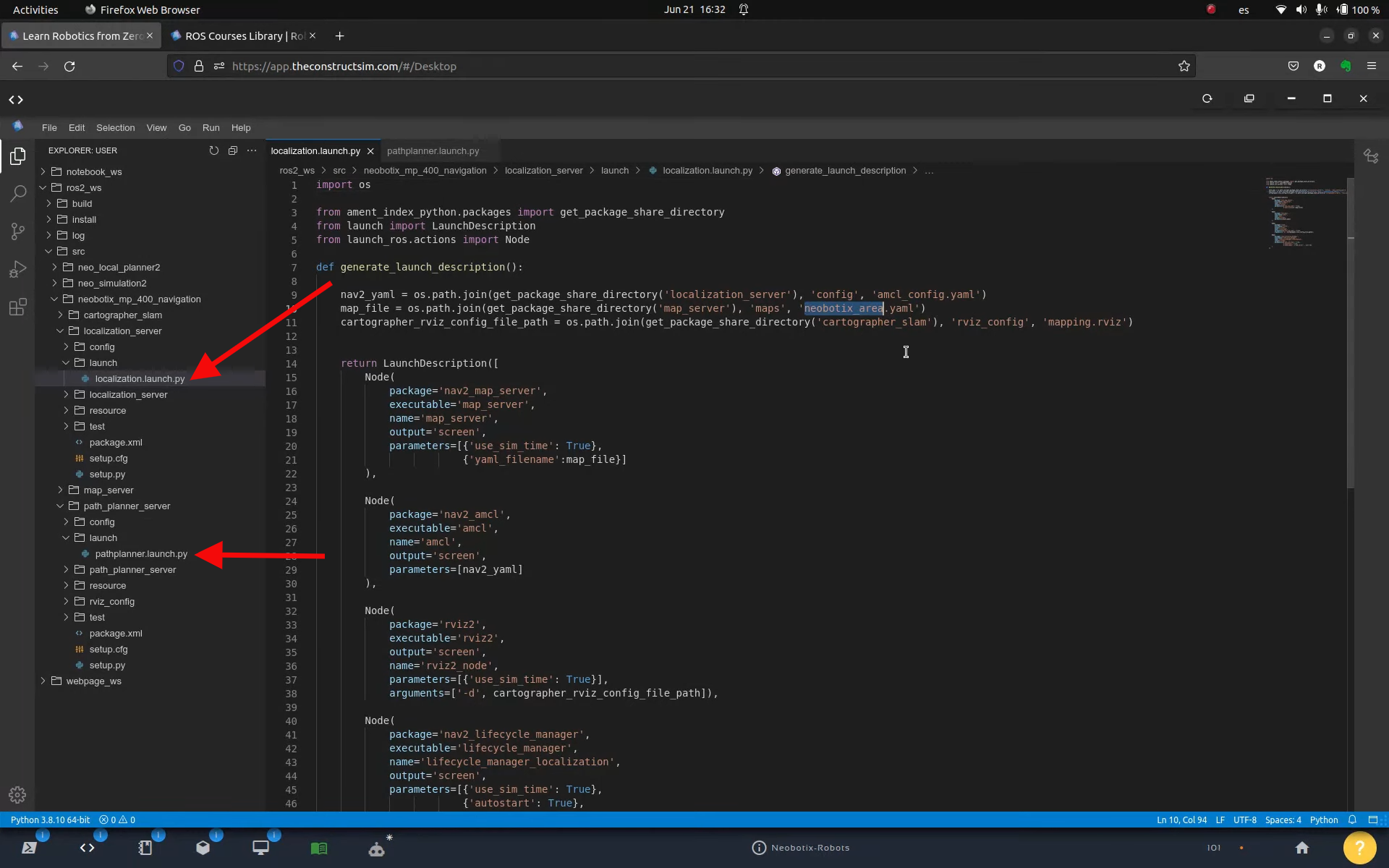
The files used to launch the Localization Server and Path Planner are found on the following paths:
ls ~/ros2_ws/src/neobotix_mp_400_navigation/localization_server/launch/localization.launch.py
ls ~/ros2_ws/src/neobotix_mp_400_navigation/path_planner_server/launch/pathplanner.launch.py
These files can also be seen in the Code Editor:
Localization Server and Path Planner – How to follow waypoints using nav2
Feel free to localize and send goals to the robot as shown in this video about ROS2 Navigation for Omnidirectional Robots:
Global Costmap and Local Costmap in RViz
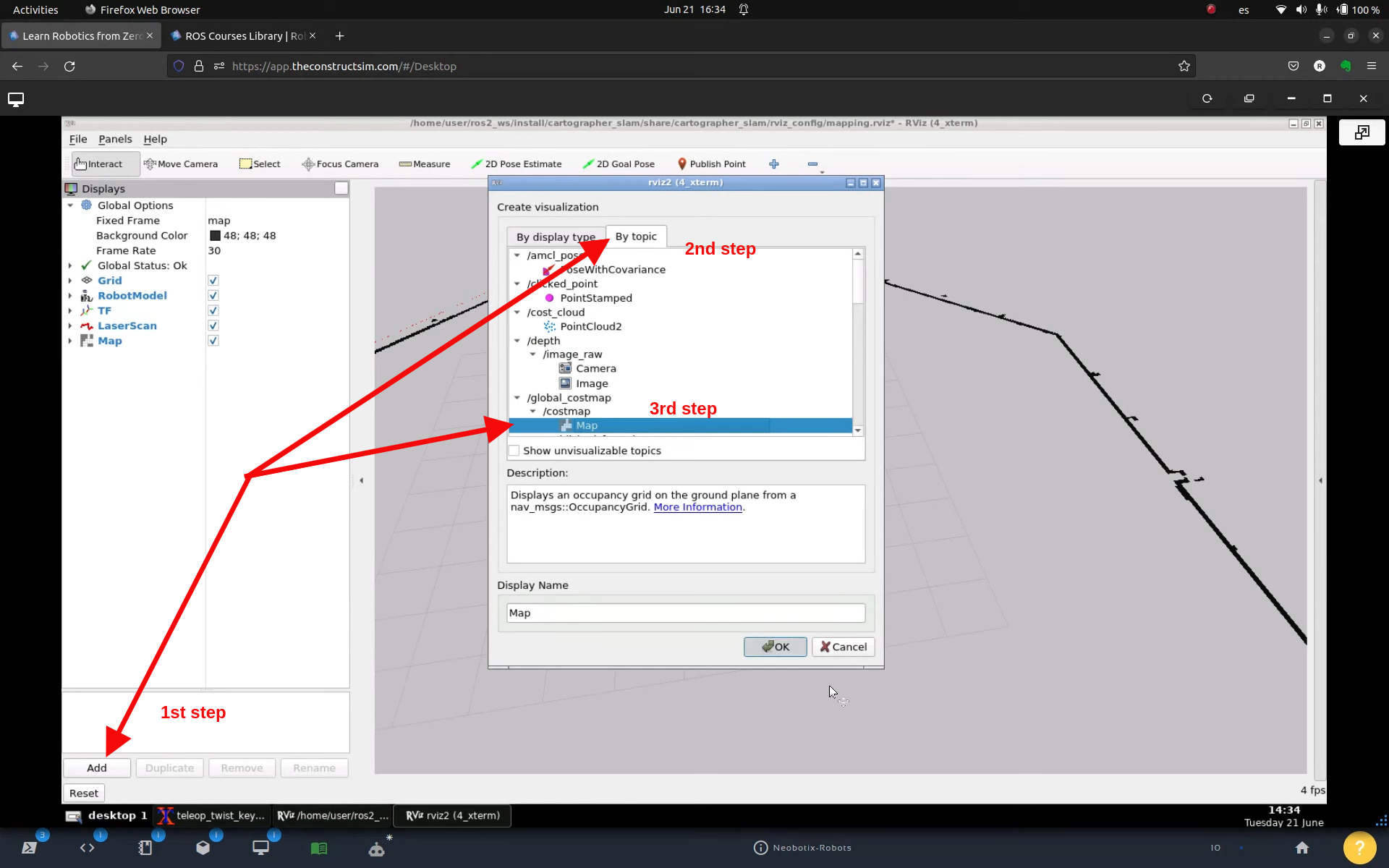
Assuming you have RViz running, you can add Global and Local costmaps to it. For that, click the Add button on the bottom left side of RViz, then Add by Topic, then select Global Costmap:
Add by topic – Global Costmap – How to follow waypoints using nav2
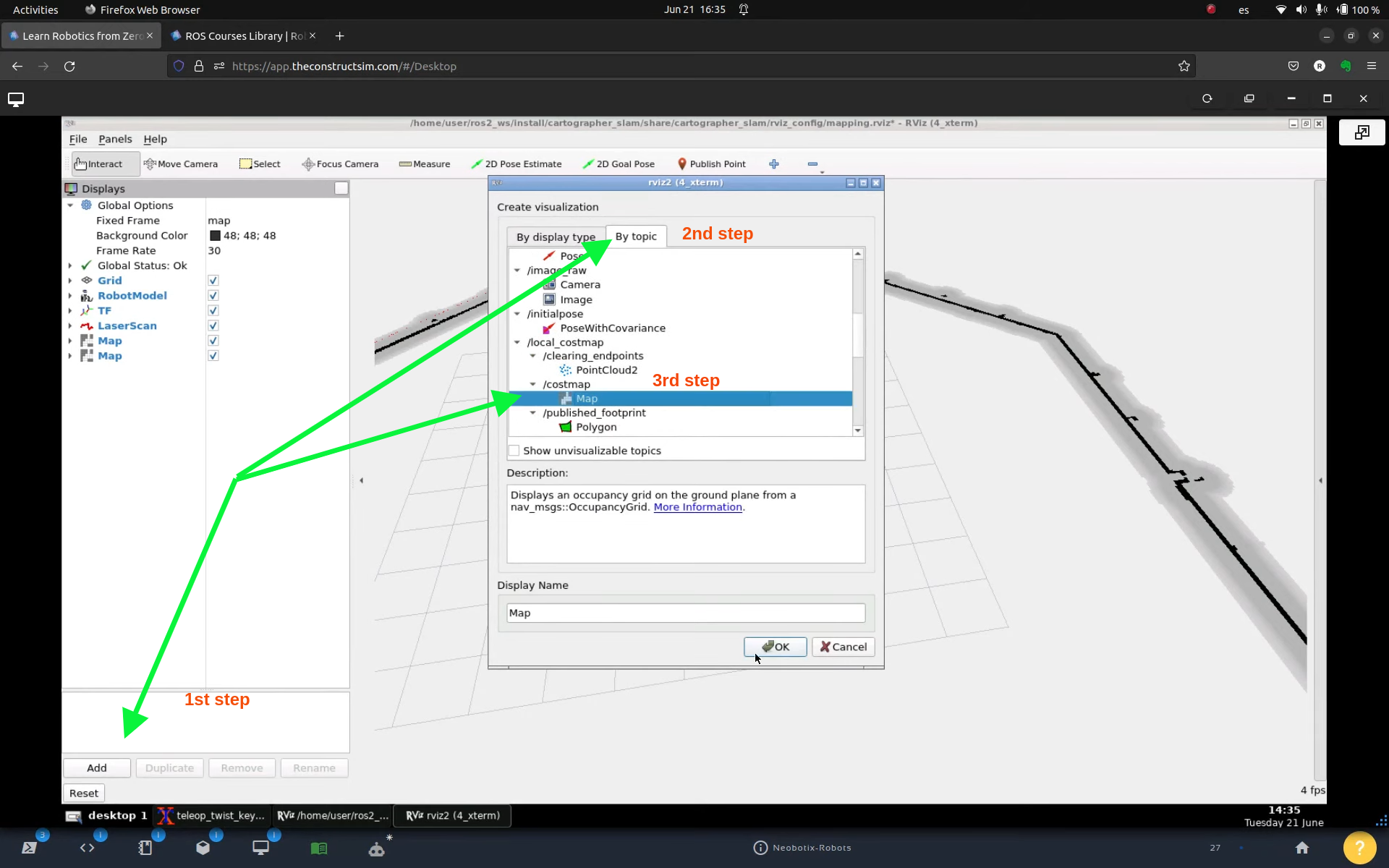
To add Local Costmap, click the Add button on the bottom left side of RViz, then Add by Topic, then select the Map under Local Costmap:
Add by topic – Local Costmap – How to follow waypoints using nav2
Assuming everything went well so far, now we are going to test the waypoint follower.
Waypoint follower
If you forked the rosject (clicking on the link we provided to you earlier), you should have a package named follow_waypoints on your ros2_ws/src folder already, but for documentation purposes, and in case you want to know the baby steps, here is how we created that package.
First, in a fourth terminal we created that package:
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_python follow_waypoints
By listing the content of that ~/ros2_ws/src folder, we see that the package has been created:
ls
# follow_waypoints neo_local_planner2 neo_simulation2 neobotix_mp_400_navigation
That follow_waypoints package has a folder with the same name on it. On that folder, we created a file named follow_waypoints.py
cd ~/ros2_ws/src/follow_waypoints/follow_waypoints
touch follow_waypoints.py
chmod +x follow_waypoints.py
The touch command was used to create the file, and the chmod +x command was used to give execution permissions to that file (make it executable, basically)
We then pasted some content on the follow_waypoints.py file. You can see the content by opening that file using the Code Editor.
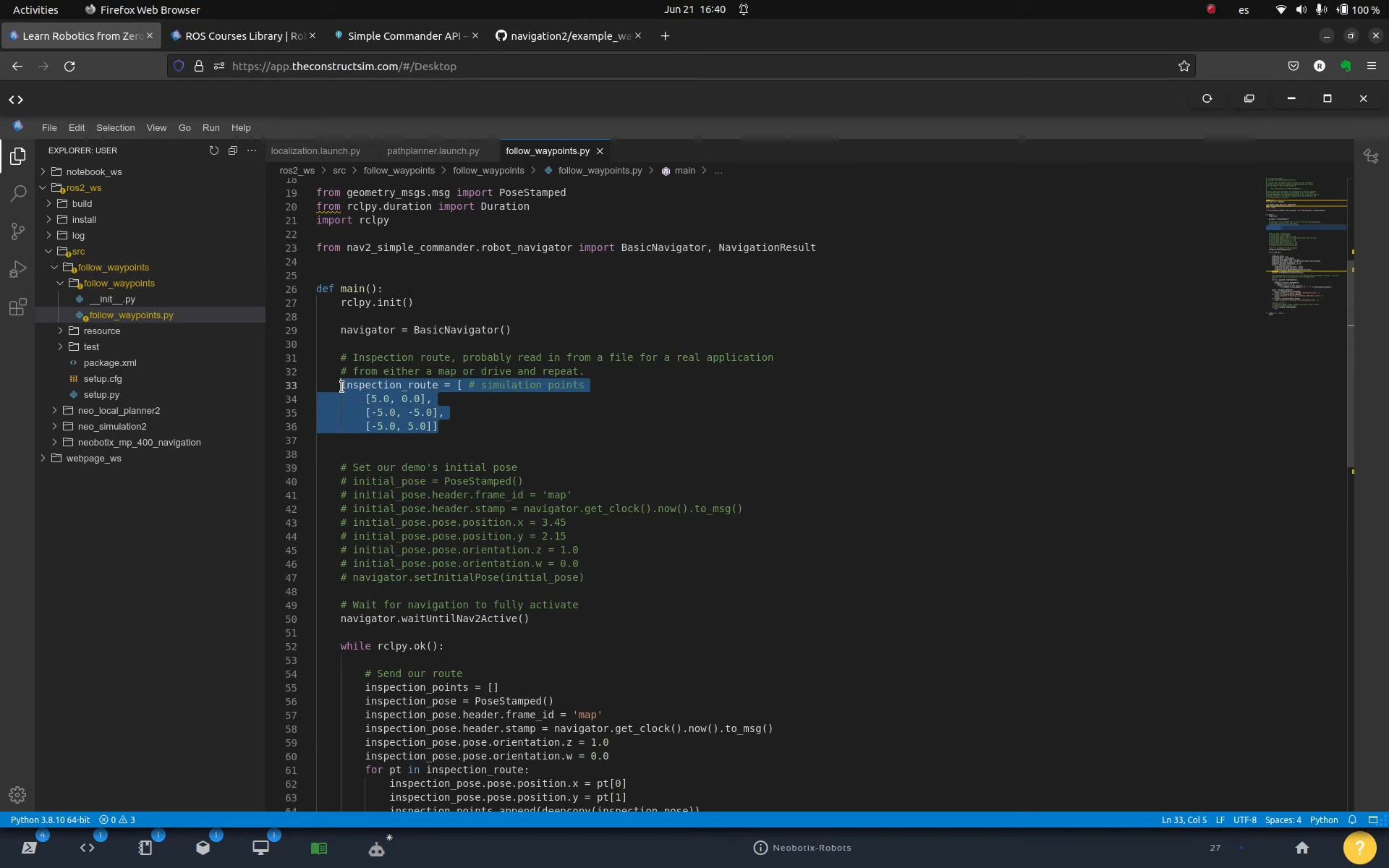
Inspection Route – To navigation to – How to follow waypoints using nav2
On lines 33 to 36 we define an inspection_route variable, which essentially is an array that defines the waypoints (positions in the map) that the robot has to go when patrolling.
#! /usr/bin/env python3
# Copyright 2021 Samsung Research America
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import time
from copy import deepcopy
from geometry_msgs.msg import PoseStamped
from rclpy.duration import Duration
import rclpy
from nav2_simple_commander.robot_navigator import BasicNavigator, NavigationResult
def main():
rclpy.init()
navigator = BasicNavigator()
# Inspection route, probably read in from a file for a real application
# from either a map or drive and repeat.
inspection_route = [ # simulation points
[5.0, 0.0],
[-5.0, -5.0],
[-5.0, 5.0]]
# Set our demo's initial pose
# initial_pose = PoseStamped()
# initial_pose.header.frame_id = 'map'
# initial_pose.header.stamp = navigator.get_clock().now().to_msg()
# initial_pose.pose.position.x = 3.45
# initial_pose.pose.position.y = 2.15
# initial_pose.pose.orientation.z = 1.0
# initial_pose.pose.orientation.w = 0.0
# navigator.setInitialPose(initial_pose)
# Wait for navigation to fully activate
navigator.waitUntilNav2Active()
while rclpy.ok():
# Send our route
inspection_points = []
inspection_pose = PoseStamped()
inspection_pose.header.frame_id = 'map'
inspection_pose.header.stamp = navigator.get_clock().now().to_msg()
inspection_pose.pose.orientation.z = 1.0
inspection_pose.pose.orientation.w = 0.0
for pt in inspection_route:
inspection_pose.pose.position.x = pt[0]
inspection_pose.pose.position.y = pt[1]
inspection_points.append(deepcopy(inspection_pose))
nav_start = navigator.get_clock().now()
navigator.followWaypoints(inspection_points)
# Do something during our route (e.x. AI to analyze stock information or upload to the cloud)
# Simply print the current waypoint ID for the demonstation
i = 0
while not navigator.isNavComplete():
i = i + 1
feedback = navigator.getFeedback()
if feedback and i % 5 == 0:
print('Executing current waypoint: ' +
str(feedback.current_waypoint + 1) + '/' + str(len(inspection_points)))
result = navigator.getResult()
if result == NavigationResult.SUCCEEDED:
print('Inspection of shelves complete! Returning to start...')
elif result == NavigationResult.CANCELED:
print('Inspection of shelving was canceled. Returning to start...')
exit(1)
elif result == NavigationResult.FAILED:
print('Inspection of shelving failed! Returning to start...')
# go back to start
# initial_pose.header.stamp = navigator.get_clock().now().to_msg()
# navigator.goToPose(initial_pose)
while not navigator.isNavComplete:
pass
if __name__ == '__main__':
main()
In addition to that follow_waypoints.py file, we also had to create the ~/ros2_ws/src/follow_waypoints/config/follow_waypoints.yaml and ~/ros2_ws/src/follow_waypoints/setup.py files.
Please check that files. If you want a deeper explanation about those files, please check the video available at the end of this post.
Alright, after having created that package and the required configuration files, the next was was compiling the package:
cd ~/ros2_ws
colcon build; source install/setup.bash
Then, to see the robot following the waypoints, we can run:
cd ~/ros2_ws
source install/setup.bash
ros2 run follow_waypoints follow_waypoints_exe
Looking at the simulation and at RViz, you should be able to see the robot moving.
Congratulations. You just learned how to make a robot follow waypoints using nav2 (the official ROS 2 Navigation package)
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
ROS2 is an open-source software framework for robotics that provides libraries and tools to help developers create robot applications.
Documentation is an essential part of any software project, and ROS2 welcomes contributions from anyone who wants to improve it.
In this video, we will show you how to find issues to work on, clone tutorial packages into a rosject, and create pull requests. By the end of this video, you will be able to make your first contribution to ROS2 documentation and become part of the ROS2 community.
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/56492ac1/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
How to release a ROS 2 binary package – Part 3 – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Starting the simulation
After having opened the rosject, let’s start a simulation following the ROS Nav2 documentation to move the robot around. For that, let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Let’s run the following commands in the first terminal in order to launch the simulation:
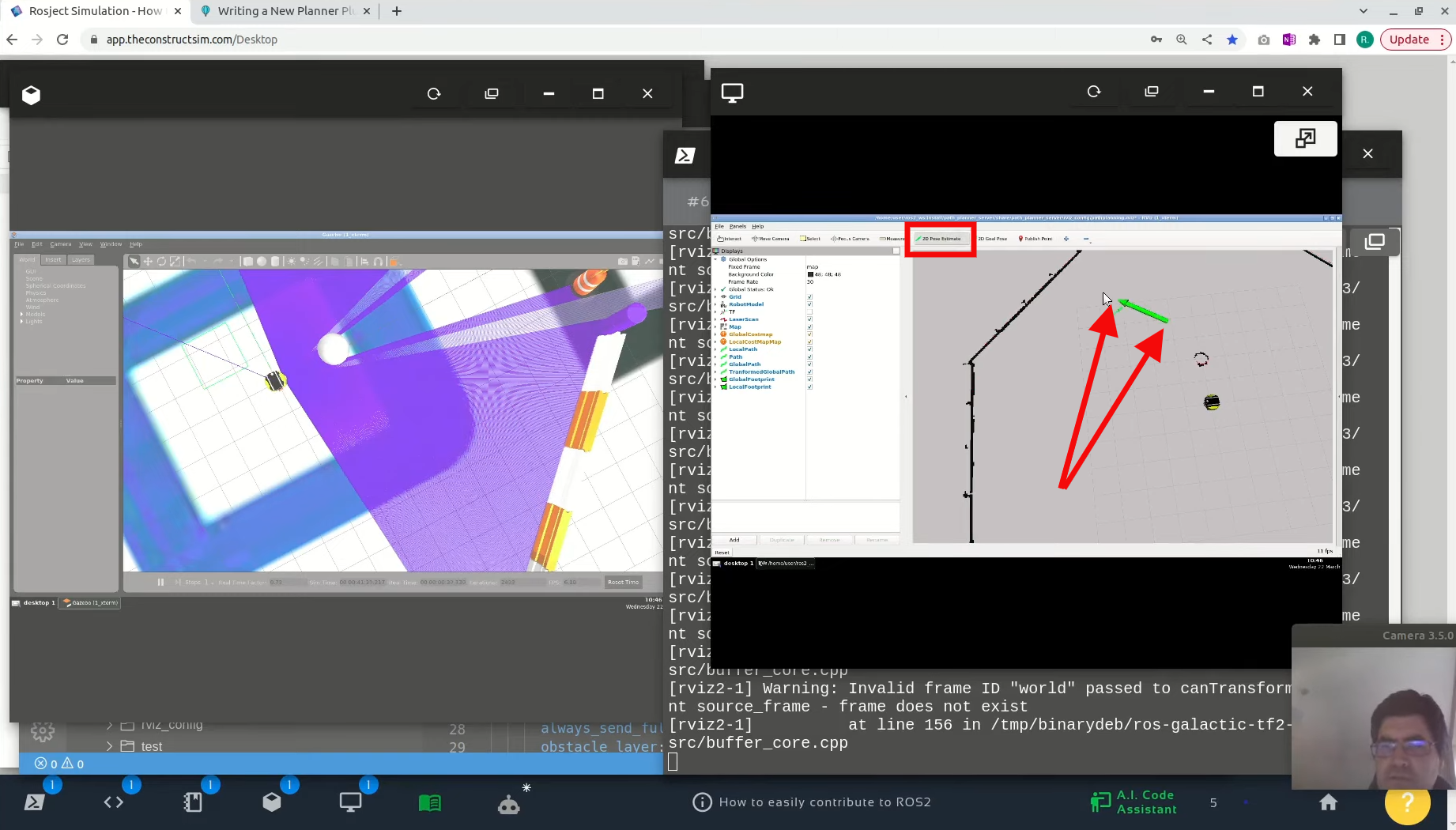
If everything went ok, you should have something like we have in the image below, where we have a simulation (on the left side), and the RViz (Robot Visualization) window (on the right side)
Neo robot simulation – setting a pose goal on Nav2
If we just try to set a 2D Pose Goal for the robot to move around, by clicking on 2D Pose Goal on RViz, and then set the goal as we can see in the blue arrow in the image above, the robot should move without any problems (because the rosject is fixed).
Reproducing a problem found in the nav2 documentation
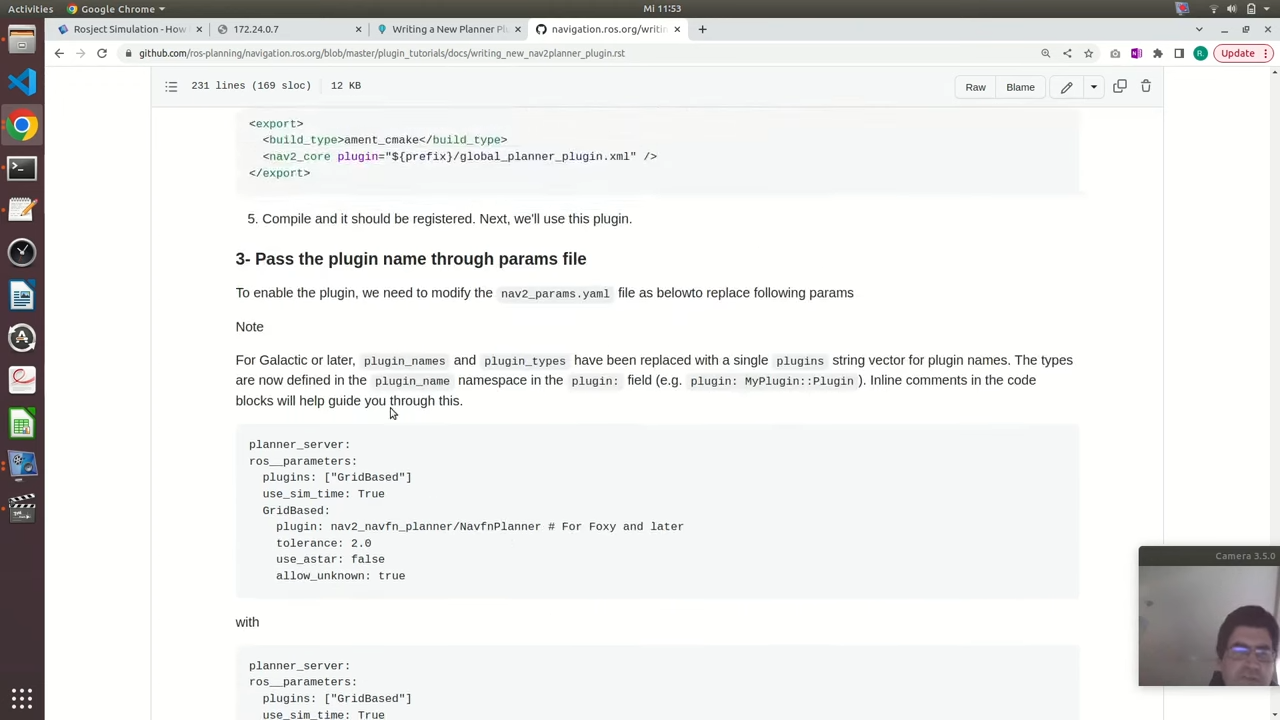
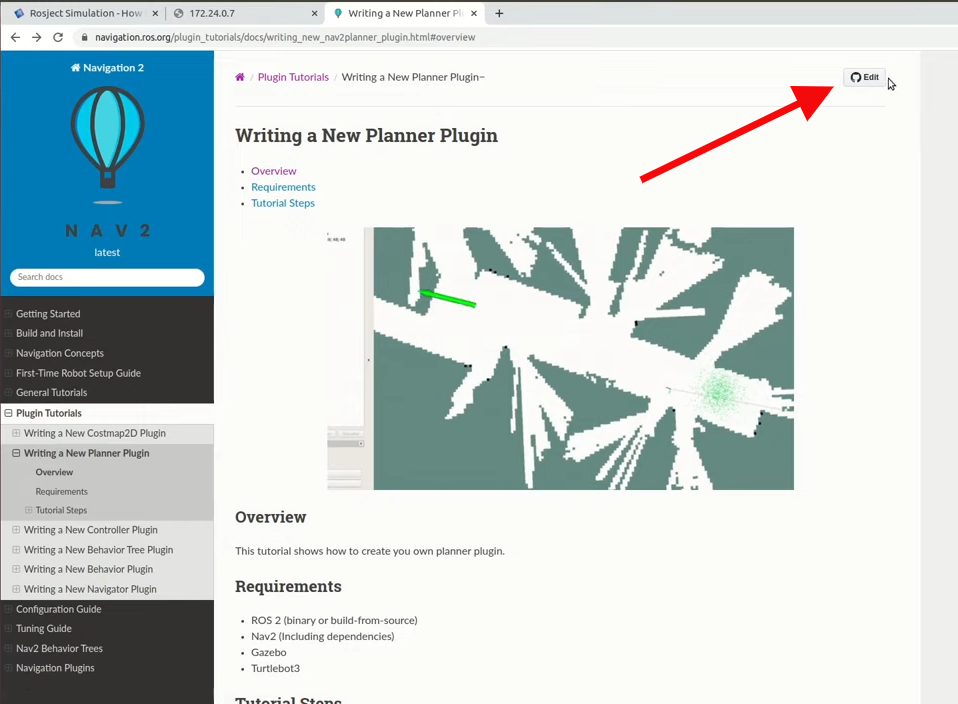
In order to move a robot around in ROS 2, we use the Nav2 package. There is a nav2 documentation in the following link, that we are interested in, for the purpose of this video:
At the end of the page on the link aforementioned, you will find a code that contains the “planner_server” term.
When this post was created, the code was indented more or less like what we see below (planner_server and ros__parameters have the same indentation):
How to easily contribute to ROS2 documentation – Indentation
The instructions in the linked aforementioned say that we could paste that content in the nav2_params.yaml file. .
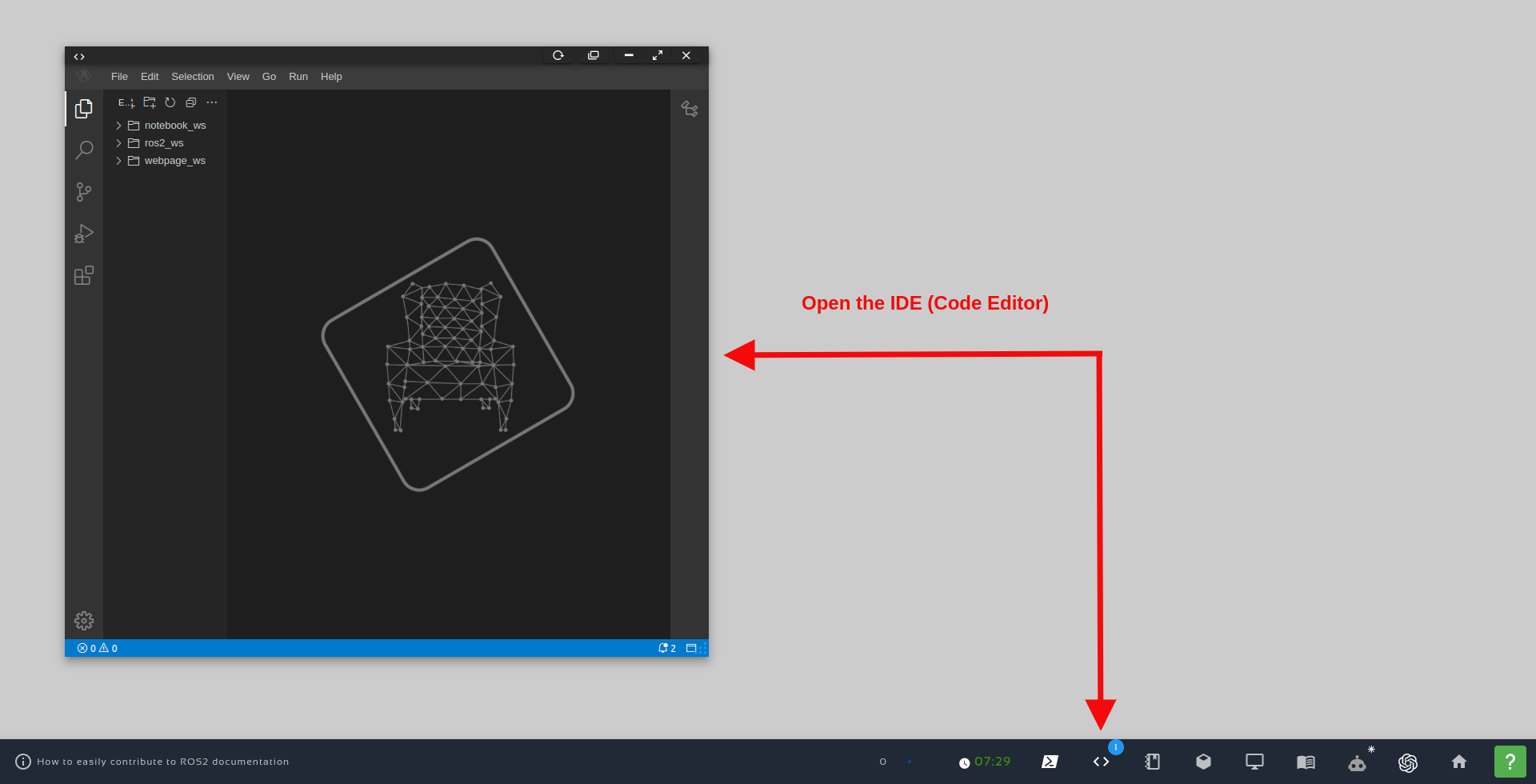
If you want to find that file on the rosject, you first have to open the Code Editor:
Open the IDE – Code Editor
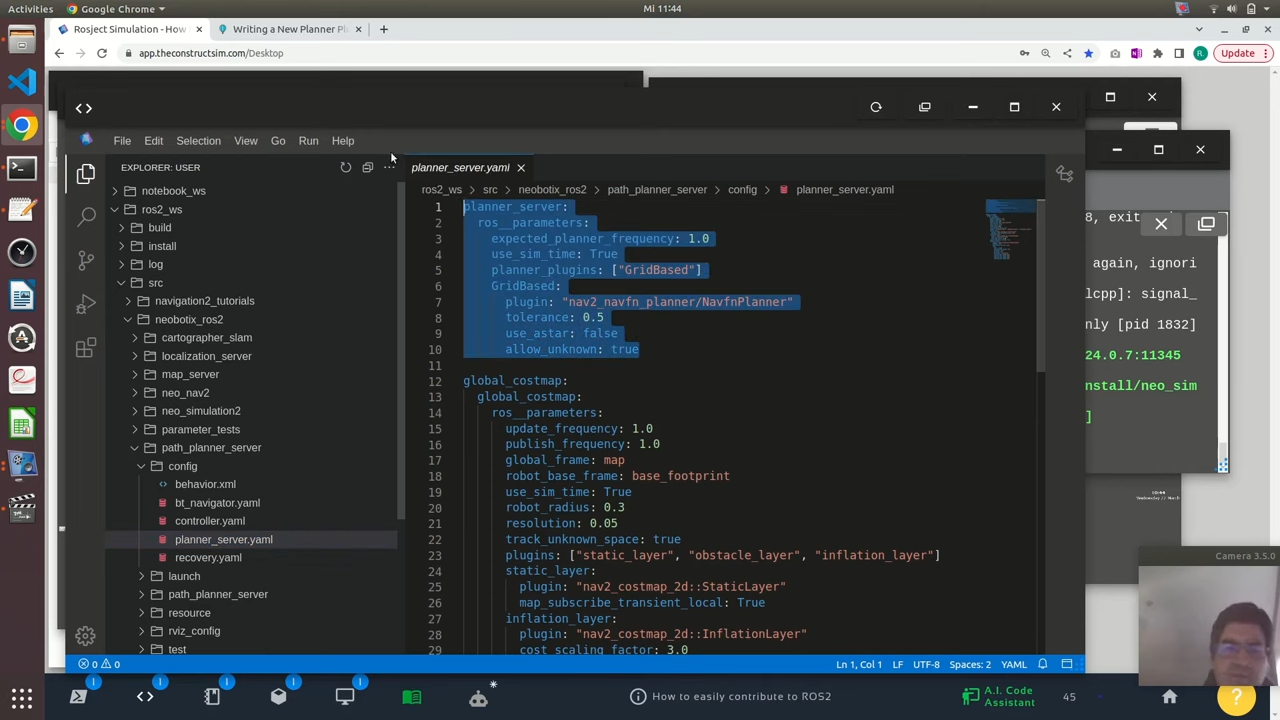
The nav2 tutorial mentions nav2_params.yaml, but in the specific rosject shared at the beginning of this post, the file used is planner_server.yaml
Once the Code Editor is open, you can find the nav2_params.yaml file at the following path: ~/ros2_ws/src/neobotix_ros2/path_planner_server/config/planner_server.yaml.
nav2_params.yaml – How to easily contribute to ROS2 documentation
You don’t have to, but if you replace the first 10 lines of planner_server.yaml with the non-indented code that was provided on the nav2 tutorial when this post was created, you would replace the first 10 lines with the following content:
If you had pasted the content above (as I said earlier, you don’t have to), you would have to kill the programs launched in the 3 terminals by pressing CTRL+C,
After that, you would have to recompile the ros2_ws using the following commands on the first terminal:
cd ~/ros2_ws
colcon build
After that, you could try to launch the simulation just like we did earlier:
In the first terminal, the simulation would be launched:
But, when launching the Path Planner, you would have the following error:
[planner_server-3] [ERROR] [1678443929.379055702] [rcl]: Failed to parse global arguments
[planner_server-3] terminate called after throwing an instance of 'rclcpp::exceptions::RCLInvalidROSArgsError
[planner_server-3] what(): failed to initialize rcl: Couldn't parse params file:
'--params-file /home/user/ros2_ws/install/path_planner_server/share/path_planner_server/config/planner_server.yaml'.
Error: Cannot have a value before ros__parameters at line 12,
at /tmp/binarydeb/ros-galactic-rcl-yaml-param-parser-3.1.3/src/parse.c:793,
at /tmp/binarydeb/ros-galactic-rcl-3.1.3/src/rcl/arguments.c:406
The error message shows that there is a problem when trying to parse the file. The problem is mainly an indentation problem.
Now, since the problem was found in the nav2 tutorial itself, how to contribute to this fix get resolved?
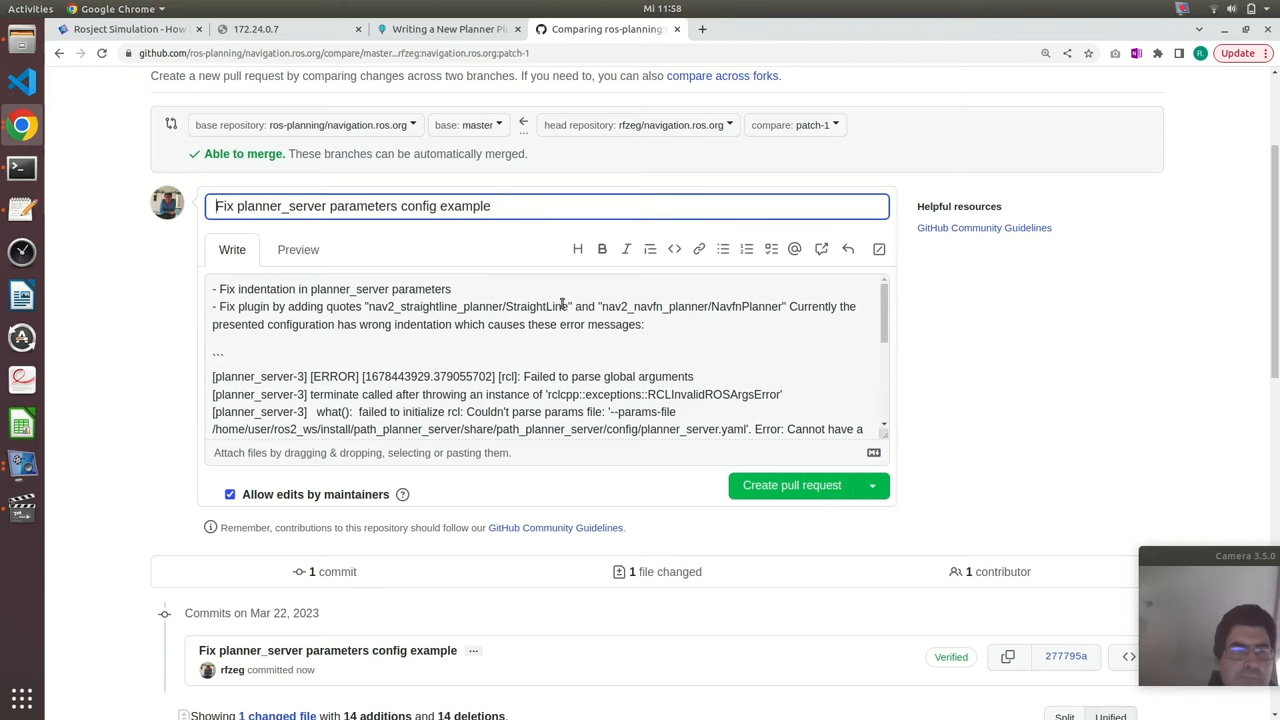
Contributing to the documentation – Creating a Pull Request
By opening this last link, you will see at the top right corner a button that allows you to edit that file. You just have to click that link.
You can then make your changes, and create a commit. After that, you can just create a Pull Request:
Pull Request – fix nav2 documentation
And that is it.
The repository maintainers will review your changes, and if everything is ok, they will approve it. If not ok, they will suggest some changes. If they suggest changes, you just make the changes as requested.
Congratulations. You just learned how to contribute to the ROS Documentation.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/50fbfe47/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Opening the Code Editor
Now that the rosject is open, let’s open the Code Editor by clicking on the second link:
Open the IDE – Code Editor
Once the Code Editor is open, you should be able to see that we have a ros2_ws folder (ROS2 workspace)
The sam_bot_description.urdf file
Now that you have the Code Editor open, let’s have a look at the file that contains the robot description. The file is inside the ros2_ws folder. The full path is:
As we saw in the overview, the question asked in ROS Answers was saying that the robot wheels were not working. That happened probably because the person forgot to add something to the URDF file.
Now, go to the terminal you have open and run the following command to run the simulation:
ros2 launch sam_bot_description display.launch.py
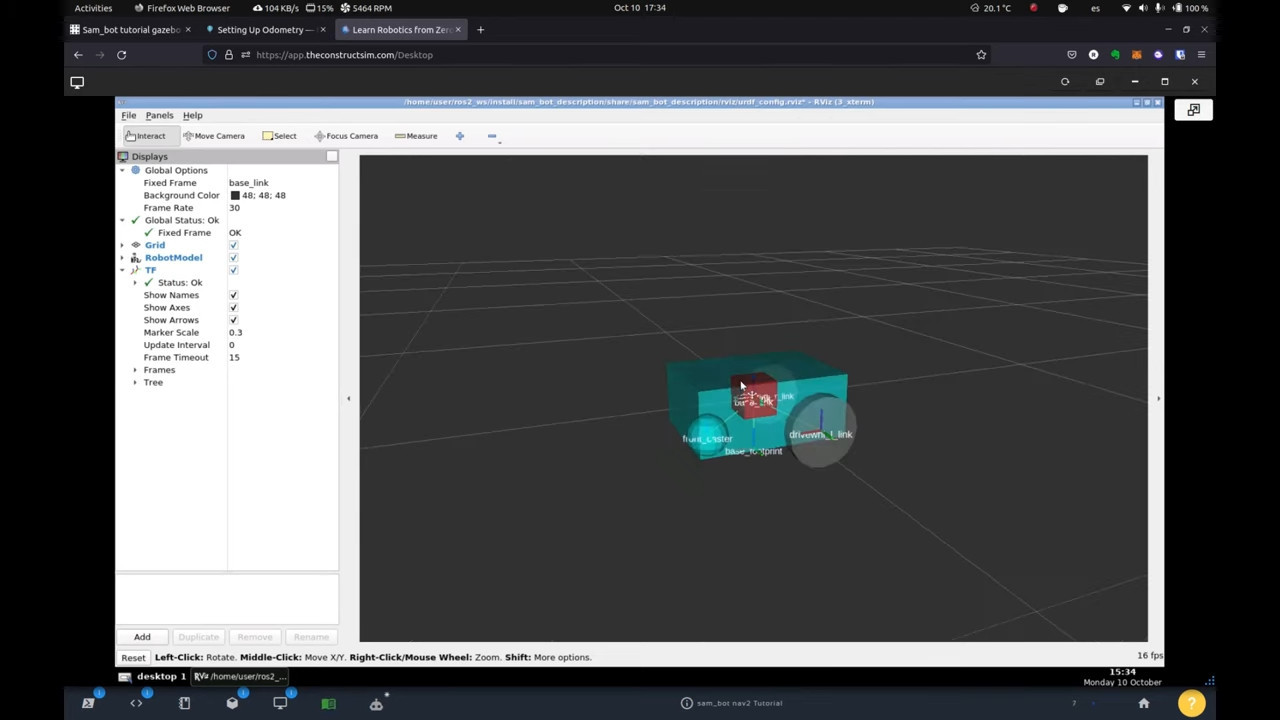
If everything went well, you should have Gazebo as well as RViz open, like in the image below (If the Graphical Tools don’t open automatically, just click click the 4th and 5th buttons on the bottom left bar to Open Gazebo and Open the Graphical Tools):
You can also see the Gazebo simulation by clicking the 4th icon named Open Gazebo. There you will see that the wheels are in place.
Well, that is pretty much it.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:

![[ROS2 Q&A] How to follow waypoints using nav2 #232](https://www.theconstruct.ai/wp-content/uploads/2023/06/How-to-follow-waypoints-using-nav2.jpg)




![[ROS2 Q&A] How to spawn robot from sam_bot nav2 tutorial #237](https://www.theconstruct.ai/wp-content/uploads/2022/11/How-to-spawn-robot-from-sam_bot-nav2-tutorial.jpeg)