Learn how to create a ROS node server and some custom messages to access the real Pan & Tilt. This way any ROS program will be able to access the Pan & Tilt and will serve as the base for creating a simulation in the next video.
In this video, you are going to learn how to set up your raspberry pi to use the Pan & Tilt Hat created by WaveShare.
We will create a python class to move the two servos and test all its functionality.
Remember to leave a message of love to ANKI 😉 with the Hashtag #WeLoveYouANKI
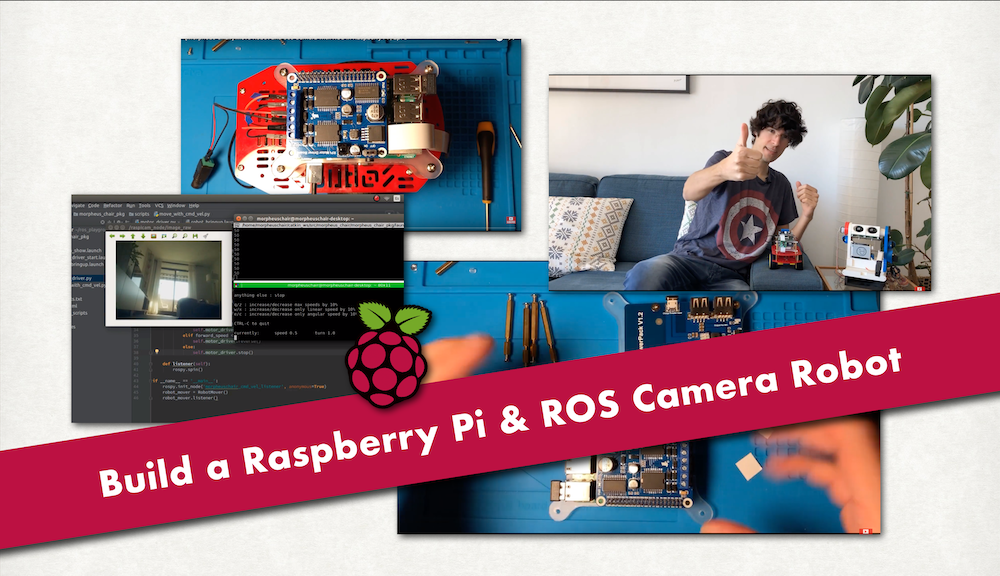
In this video, you will learn how to mount the robot in an autonomous system. We will learn:
– How to install the Raspberry Pi Camera.
– How to do ssh to Raspberry Pi, remote desktop and install ROS kinetic in Raspberry Pi Ubuntu Mate.
– How to start a roslaunch that will allow us to move with the keyboard through ssh the robot
– How to see the images published in ROS of the camera.
List of materials
Raspberry Pi Kit ( RaspBerry, PowerBrick, microSD16GB, Case, HDMI )
Welcome to Morpheus-Chair, the program where you will learn how to build a ROS RaspBerry Pi Robot to be used as a foundation to learn all there is in this fascinating world of Robotics.
In this first video, we introduce the video series and teach you how to assemble the chassis step-by-step.

![[Morpheus Chair] Pan & Tilt with Raspberry Pi and ROS | S3.Ep.1](https://www.theconstruct.ai/wp-content/uploads/2019/05/Pan-Tilt-with-Raspberry-Pi-and-ROS-tutorials-the-construct.png)
![[Morpheus Chair] Build the Structure of a ROS Raspberry Pi Robot #Ep.1](https://www.theconstruct.ai/wp-content/uploads/2019/01/Build-the-Structure-of-a-ROS-Raspberry-Pi-Robot.jpg)
![[ROS Projects] – ROS with Raspberry Pi 3 using Gazebo Face Simulation #Part 4](https://www.theconstruct.ai/wp-content/uploads/2018/04/ROS-Projects-ROS-with-Raspberry-Pi-3-using-Gazebo-Face-Simulation-Part4.png)