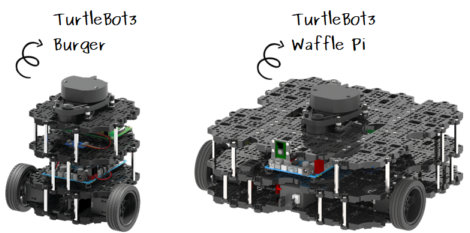
ROS (Robot Operating System) se está convirtiendo en el “framework” estándar para programar robots. En este tutorial emplearemos los conceptos de tópicos y nodos para mover el robot “Turtlebot3” hacia múltiples posiciones deseadas. Hacemos uso de los mensajes del tópico /odom para conocer la posición estimada del robot y publicar en el tópico /cmd_vel para mover el robot a las posiciones deseadas. Todo esto es simulado en un mundo de Gazebo. Ten encuesta que se usará ROS2 Humble para este tutorial.
PASO 1: Abriendo el rosject
Para seguir este tutorial, necesitamos tener instalado ROS2 HUMBLE en nuestro sistema, y lo ideal sería tener un ros2_ws (Espacio de Trabajo ROS2). Para facilitarte la vida, ya hemos preparado un rosject para eso: https://app.theconstructsim.com/l/5fc977f5/.
Simplemente copiando el rosject (haciendo clic en el enlace de arriba), tendrás una configuración ya preparada para ti.
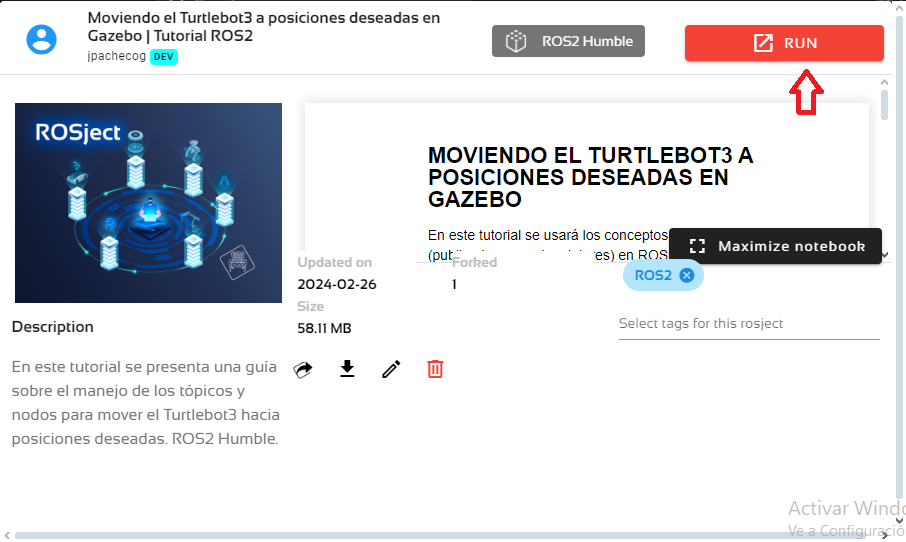
Después de haber copiado el rosject a tu propia área de trabajo, deberías ver el botón RUN. Haz clic en ese botón para lanzar el rosject (abajo tienes un ejemplo de rosject).
Tras pulsar el botón RUN, deberías tener cargado el rosject. Ahora, pasemos a la siguiente sección para ponernos manos a la obra.
El Turtlebot3 se moverá por una serie de posiciones en un orden específico, es decir, se moverá de su posición inicial a la 1ra posición deseada, una vez alcanzada, se moverá a la 2da posición y así sucesivamente. Para lograr esto, necesitamos de una estrategia.
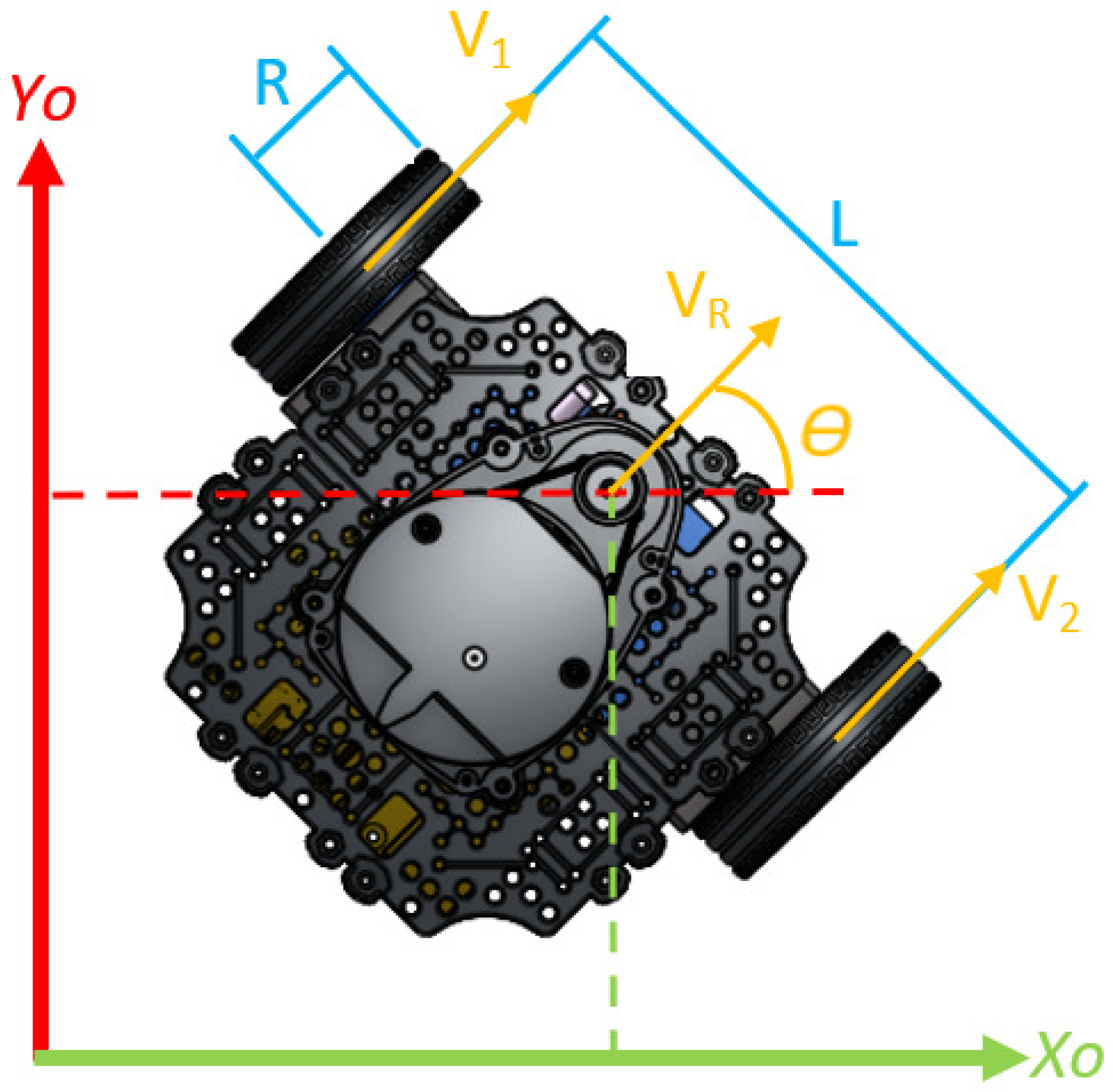
Tengamos en cuenta que el robot conocerá las posiciones que debe alcanzar y su posición actual estimada gracias al tópico /odom, del cual aprovecharemos la posición en X, posición Y, y la rotación en Z.
Con ello, para alcanzar cada posición el Turtlebot3 realizará 2 movimientos: Primero, girar hasta que quede mirando a la posición deseada; Segundo, avanzar de manera recta hasta llegar a la posición.
Adicionalmente, debemos tener en cuenta el robot no se moverá en una línea recta de manera perfecta, por lo que se requiere compensar esa desviación conforme avanza. Esto se puede realizar añadiendo una velocidad angular cuando la orientación cambie demasiado.
Creación del paquete
Primero creamos un paquete en python para realizar un nodo-publicador-subscriptor que mueva al Turtlebot3 de la forma deseada. Necesitamos añadir las dependencias necesarias. Para ello ejecutamos en un terminal lo siguiente:
Debido a que en el tópico /odom la orientación es expresada en cuaterniones, el método euler_from_quaternion es necesario para convertir la orientación del robot de cuaterniones a la notación roll-pitch-yaw. Esto nos permite obtener la rotación del robot alrededor del eje z (yaw).
def euler_from_quaternion(self, quaternion):
"""
Converts quaternion (w in last place) to euler roll, pitch, yaw
quaternion = [x, y, z, w]
Below should be replaced when porting for ROS2 Python tf_conversions is done.
"""
x = quaternion[0]
y = quaternion[1]
z = quaternion[2]
w = quaternion[3]
sinr_cosp = 2 * (w * x + y * z)
cosr_cosp = 1 - 2 * (x * x + y * y)
roll = np.arctan2(sinr_cosp, cosr_cosp)
sinp = 2 * (w * y - z * x)
pitch = np.arcsin(sinp)
siny_cosp = 2 * (w * z + x * y)
cosy_cosp = 1 - 2 * (y * y + z * z)
yaw = np.arctan2(siny_cosp, cosy_cosp)
return roll, pitch, yaw
Este es el método definido en el timer y contiene la estrategia de control explicada anteriormente. Se ejecuta cada 0.1s y actualiza la velocidad del robot de acuerdo con la posición estimada.
Finalmente simularemos el comportamiento en gazebo, para ello primero iniciamos la simulación del Turtlebot3, cuyo paquete ya esta en este rosject. Esta se puede obtener desde este link.
In this post, you will learn how to publish and subscribe to a topic from a launch file. This post is a response to this question posted on Gazebo Answers.
Step 1: Fire up a system with ROS installation
“Hey, do you mean I have to install ROS first?” Absolutely not! Just log in to The Construct to get access to virtual machines pre-installed with ROS.
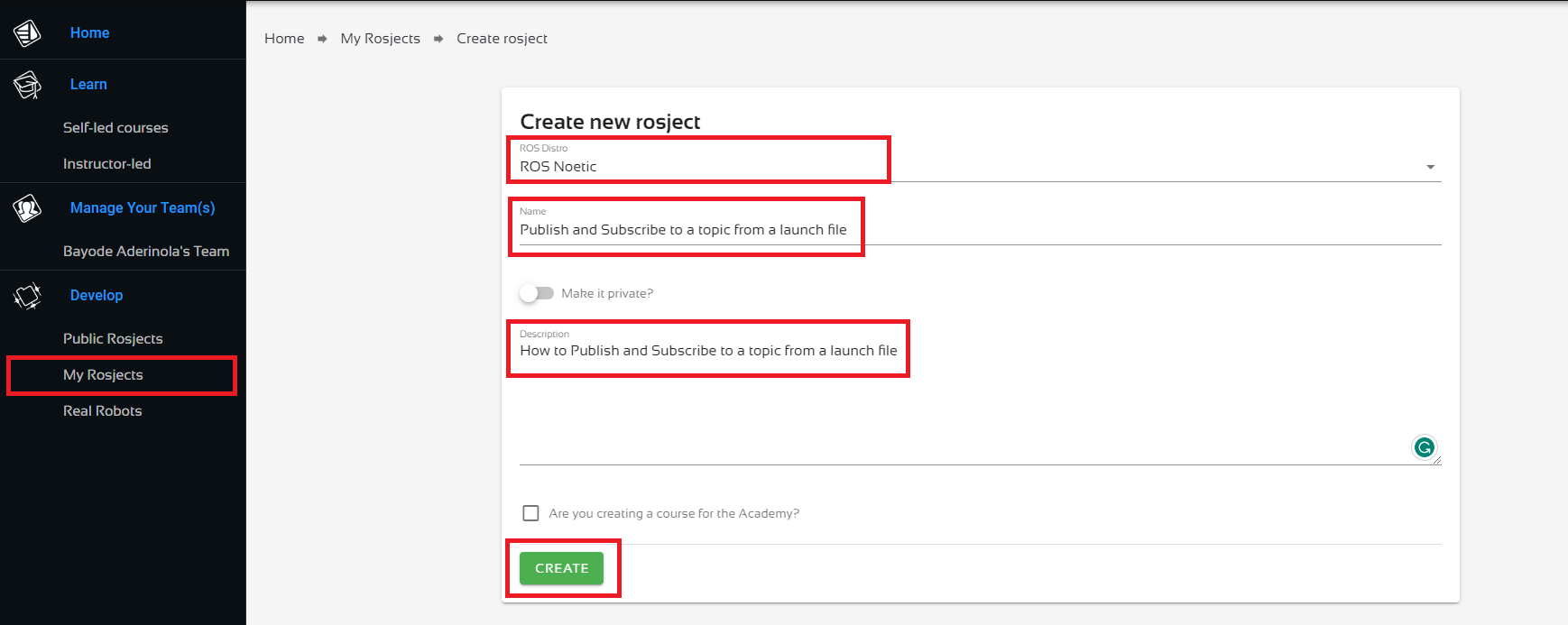
Once logged in, click on My Rosjects, then Create a New Rosject, supply the information as shown in the image below, and click Create. Then RUN the rosject.
Create a new Rosject
You might also want to try this on a local PC if you have ROS installed. However, please note that we don’t support local PCs and you will have to fix any errors you run into on your own. The rest of the instruction assumes that you are working on The Construct; please adapt them to your local PC and ROS installation.
PS: we are using ROS Noetic. You should be able to replicate the same on any ROS 1 distro.
Step 2: Create a package to demonstrate how to publish and subscribe to a topic from a launch file
Open a web shell
Open a web shell and run the following commands to create the package.
cd catkin_ws/src
source /opt/ros/noetic/setup.bash
catkin_create_pkg test_rostopic
Next, we create the launch directory and the launch files.
cd test_rostopic
mkdir launch
cd launch
touch test_pub.launch
touch test_echo.launch
Nice done! Now head over to the Code Editor to make changes to the launch files. Check the image below for how to open the Code Editor.
Open the Code Editor
Locate the launch folder in the code editor: catkin_ws > src > test_rostopic > launch and open the two launch files.
Paste the following lines into the test_pub.launch file. This is equivalent to rostopic pub /test_topic std_msgs/String "data: 'Hello there!'"
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Success! We’ll test it in the next step.
PS: if your code did not compile correctly, please go over the instructions and ensure you have created the files in the exact locations specified.
Step 3: Test the package to demonstrate how to publish and subscribe to a topic from a launch file
Start the test_pub.launch file in the current terminal.
roslaunch test_rostopic test_pub.launch
When done, open another terminal and run the test_echo.launch file.
roslaunch test_rostopic test_echo.launch
Now you should see something similar to the following on the terminal where test_echo.launch is running:
process[rostopic_echo_node-1]: started with pid [xxxx]
data: "Hello there!"
---
Sweet! So we are able to publish with one launch file and echo what we publish in another launch file. And…we are done here, congrats!
Take home: try combining both into a single launch file. After trying, check the solution in this gist.
Step 4: Check your learning
Do you understand how to publish and subscribe to a topic from a launch file? If you don’t know it yet, please go over the post again, more carefully this time.
(Extra) Step 5: Watch the video to understand how to publish and subscribe to a topic from a launch file
Here you go:
Feedback
Did you like this post? Do you have any questions about how to publish and subscribe to a topic from a launch file? Please leave a comment in the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS topics, please let us know in the comments area and we will do a video or post about it.
“Hey, do you mean I have to install ROS first?” Absolutely not! Just log in to The Construct to get access to virtual machines pre-installed with ROS.
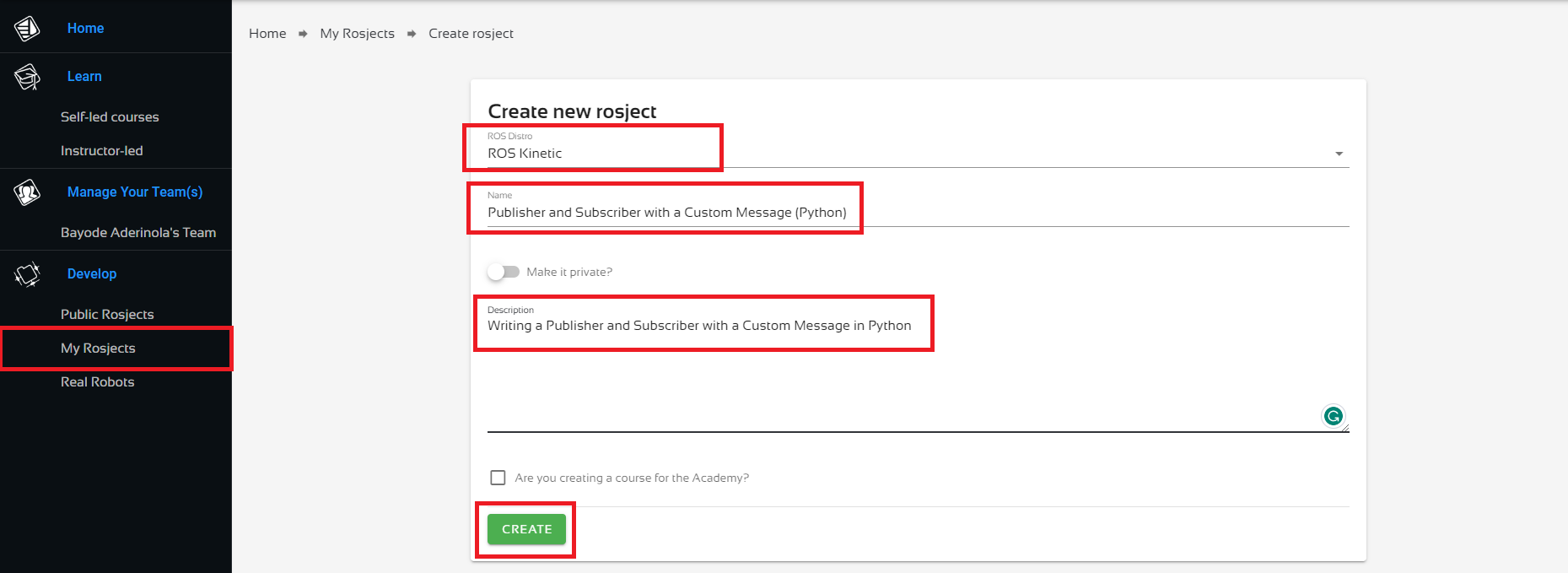
Once logged in, click on My Rosjects, then Create a New Rosject, supply the information as shown in the image below, and click Create. Then RUN the rosject.
Create a new Rosject
You might also want to try this on a local PC if you have ROS installed. However, please note that we don’t support local PCs and you will have to fix any errors you run into on your own. The rest of the instruction assumes that you are working on The Construct; please adapt them to your local PC and ROS installation.
PS:
We are using ROS Kinetic here because that’s what the user on ROS Answers used.
We could put the publisher and the subscriber in a single package, but we’ll create two packages as the user did.
We could put the custom message in any of the two packages, but we’ll put it in the subscriber, just like the user.
Step 2: Create the first package that contains the subscriber and the custom message
Open a web shell
Create the package and custom message
Open a web shell and run the following commands to create the package. When creating a custom message, you need extra dependencies message_generation and message_runtime, in addition to the main ROS API, rospy (for Python) in this case, and the types needed for the message, in this case std_msgs.
cd catkin_ws/src
source /opt/ros/kinetic/setup.bash
catkin_create_pkg quadrotor_receive rospy std_msgs message_generation message_runtime
Next, we create the message file, Person.msg. Run the following command in the same terminal you just used.
cd quadrotor_receive
mkdir msg
cd msg
touch Person.msg
Nice done! Now head over to the Code Editor to make changes to the Person.msg file. Check the image below for how to open the Code Editor.
Open the Code Editor
Locate the file in the code editor: catkin_ws > src > quadrotor_receive > msg > Person.msg and paste in the following code.
string name
int32 age
Edit package files
Replace CMakeLists.txt with the one below (where the following changes have been made).
Removed message_runtime from the find_package function.
Uncommented the add_message_files function, and added Person.msg below FILES.
Uncommented the generate_messages function, and left it intact.
Uncommented the line CATKIN_DEPENDS in the catkin_package function.
Removed all commented lines to keep the file short and sweet.
cmake_minimum_required(VERSION 3.0.2)
project(quadrotor_receive)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
message_runtime
rospy
std_msgs
)
## Generate messages in the 'msg' folder
add_message_files(
FILES
Person.msg
# Message2.msg
)
## Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs
)
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES quadrotor_receive
CATKIN_DEPENDS message_generation message_runtime rospy std_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
Next, add a single line to package.xml so that it looks like the one below. Can you identify the line that was added?
<?xml version="1.0"?>
<package format="2">
<name>quadrotor_receive</name>
<version>0.0.0</version>
<description>The quadrotor_receive package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="user@todo.todo">user</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>message_generation</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<build_export_depend>message_generation</build_export_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
Finally, let’s create the receiver Python node, just as the ROS Answers user created it. Run the following in the same terminal as before. Notice that we’re making the Python script executable.
cd ~/catkin_ws/src/quadrotor_receive/src
touch custom_listener.py
chmod +x custom_listener.py
Open custom_listener.py in the IDE and paste in the following code.
#!/usr/bin/env python
import rospy
from quadrotor_receive.msg import Person
def callback(data):
rospy.loginfo("%s is age: %d" % (data.name, data.age))
def listener():
rospy.init_node('custom_listener', anonymous=True)
rospy.Subscriber("custom_chatter", Person , callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__=='__main__':
listener()
So much for all the hard work – let’s see if it works. Time to compile the code. In the same web shell, run the following commands:
Compile and test
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Success! We have successfully created a package with a custom message. Let’s see if we can find the message. You should get an output similar to the one below.
user:~/catkin_ws$ rosmsg show quadrotor_receive/Person
string name
int32 age
Let’s also test receiver node at this point. Though there’s nothing to receive yet, it should not throw any error. First, we need to start roscore.
roscore
Then try to run your subscriber in another terminal. Leave it running!
rosrun quadrotor_receive custom_listener.py
PS: if your code did not compile correctly, please go over the instructions and ensure you have created the files in the exact locations specified.
Step 3: Create the second package that contains the publisher
Create a new folder package. This should be easy-peasy, as most of the work has been done in the previous step. Do the following in a new terminal.
cd ~/catkin_ws/src/
catkin_create_pkg transmit_thrust rospy
Next, create the custom_talker.py node.
cd transmit_thrust/src
touch custom_talker.py
chmod +x custom_talker.py
Open up custom_talker.py in the IDE and paste in the following.
#!/usr/bin/env python
import rospy
from quadrotor_receive.msg import Person
def talker():
pub = rospy.Publisher('custom_chatter', Person)
rospy.init_node('custom_talker', anonymous=True)
r = rospy.Rate(10) #10hz
msg = Person()
msg.name = "ROS User"
msg.age = 4
while not rospy.is_shutdown():
rospy.loginfo(msg)
pub.publish(msg)
r.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException: pass
Please note that:
We are importing the custom message from the quadrotor_receive package.
We are creating a publisher for the same topic we created a subscriber for in the quadrotor_receive package.
Nothing more is needed. Let’s compile our new package.
cd ~/catkin_ws
catkin_make
source devel/setup.bash
That done, let’s start the custom talker node.
rosrun transmit_thrust custom_talker.py
You should see some output similar to these on the terminal.
And…on the terminal where you have the listener tunning, you should see something similar to:
[INFO] [1680728823.956347]: ROS User is age: 4
[INFO] [1680728824.056833]: ROS User is age: 4
And we are done here!
Step 4: Check your learning
Do you understand how to write a ROS publisher and subscriber with a custom message? If you don’t know it yet, please go over the post again, more carefully this time.
(Extra) Step 5: Watch the video to understand how to write a ROS publisher and subscriber with a custom message
Here you go:
Feedback
Did you like this post? Do you have any questions about how to write a ROS publisher and subscriber with a custom message? Please leave a comment in the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS topics, please let us know in the comments area and we will do a video or post about it.
Pick a Shell from the Tools menu and run the following commands.
First, start the ROS master – we need this to run any ROS commands. We’re starting this program in the background:
user:~$ nohup roscore &
[1] 1501
user:~$ nohup: ignoring input and appending output to 'nohup.out'
user:~$
Before we proceed, let’s check the ROS topics currently available:
user:~$ rostopic list
/rosout
/rosout_agg
Now start the obiwan_pub.py program:
user:~$ cd catkin_ws/src
user:~/catkin_ws/src$ ./obiwan_pub.py
Again, check the list of available ROS topics. Pick another Shell from the Tools menu and run:
user:~$ rostopic list
/help_msg
/rosout
/rosout_agg
Now we have a new topic /help_msg, obviously created by the obiwan_pub.py program. Running it is the only thing we have done since the last time we checked the list of messages, right?
Okay, do not take my word for it; let’s spy on the /help_msg topic to confirm:
Now we know that that topic uses a message of type std_msgs/String and has a Publisher named /sos_2.
But what has this got to with the obiwan_pub node? Everything – let’s see that in the next step.
Step 3: Unravel the mysterious “Publisher” /sos_2
In the previous step, we saw that /sos_2 was listed as a Publisher on the topic /help_msg, and we suspected that this has to do with the obiwan_pub.py program. Now, let’s examine the obiwan_pub.py code to see if we have some clues.
obiwan_pub.py
#! /usr/bin/env python
import rospy
from std_msgs.msg import String
rospy.init_node("sos_2")
rate = rospy.Rate(2)
help_msg = String()
help_msg.data = "help me Obi-Wan Kenobi, you're my only hope"
pub = rospy.Publisher('/help_msg', String, queue_size = 1)
while not rospy.is_shutdown():
pub.publish(help_msg)
rate.sleep()
On line 6, we have the statement rospy.init_node("sos_2"), so we now know that:
/sos_2 was created by this program!
/sos_2 is a ROS node, because it says rospy.init_node...
Also on line 10, we have this statement: pub=rospy.Publisher('/help_msg',String,queue_size=1), confirming that:
The code actually creates a Publisher on the /help_msg topic. Bingo!
Step 4: Master the Concept – What is a ROS Publisher?
Combining all the points in the previous steps, we can see that a ROS Publisher…
is a ROS node (program).
creates a particular type of ROS message. In this case, it’s std_msgs/String, as can be seen on lines 4,7-8 of the code.
sends (publishes) a message over a channel called “topic”, as can be seen on lines 10 then 12 of the code.
In short, a ROS publisher is a ROS node that publishes a specific type of ROS message over a given ROS topic. “Interested” nodes (Subscribers) can access messages so published.
And that was it!
Extra: Video
Prefer to watch a video demonstrating the steps above? We have one for you below!
Related Resources
A previous video about ROS nodes: [irp posts=”10305″ name=”ROS in 5 mins – 005 – What is a ROS Node?”]
If you are a ROS beginner and want to learn ROS basics fast, we recommend you take any of the following courses on Robot Ignite Academy:
Step 1. Create a project in ROS Development Studio(ROSDS)
ROSDS helps you follow our tutorial in a fast pace without dealing without setting up an environment locally. If you haven’t had an account yet, you can create a free account here. Let’s create a new project and call it abc_qa.
Step 2. Create a package
Let’s create a new package called abc_qa with dependency for the code.
cd catkin_ws/src
catkin_create_pkg abc_qa roscpp
Then we create a source file called abc_code.cpp under the abc_qa/src directory with the following content
int main()
{
//Initialize and start the node
ros::Publisher pub;
//Define and create some messages
abc;
while(ros : ok)
{
ros_time = ros::time::now();
pub.publish(abc);
ros::spinOnce();
}
}
In order to compile the code, we have to change the following BUILD part in the CMakeLists.txt.
...
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
add_executable(abc_node src/abc_code.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
add_dependencies(abc_node ${abc_node_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
target_link_libraries(abc_node
${catkin_LIBRARIES}
)
...
Then we can try to compile it with the following command
cd ~/catkin_ws
catkin_make
You should get several compilation errors. Let’s fix the code. It should look like this after changing.
#include <ros/ros.h>
#include <std_msgs/Int32.h>
int main(int argc, char ** argv)
{
//Initialize and start the node
ros::init(argc, argv, "abc");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<std_msgs::Int32>("abc_topic", 1000);
//Define and create some messages
std_msgs::Int32 abc;
abc.data = 0;
ros::Rate(200);
while(ros::ok)
{
pub.publish(abc);
ros::spinOnce();
}
}
It should work now. Try to compile and run it again with the following command
cd ~/catkin_ws
catkin_make
source devel/setup.bash
rosrun abc_qa abc_node
Now we got error said that it’s missing master now. You can either run whatever simulation from Simulations or run roscore in a new shell to solve this problem. After launching the master, execute the code again. Although it shows nothing, it is actually starting to publish to topic /abc_topic you can see it with the command rostopic echo /abc_topic. You can also try to increment the counter in the while loop.
Related Course
ROS Basics for Beginners (C++)
Feedback
Did you like this video? Do you have questions about what is explained? Whatever the case, please leave a comment on the comments section below, so we can interact and learn from each other. If you want to learn about other ROS topics, please let us know in the comments area and we will do a video about it.



![[ROS in 5 mins] 022 – What is a ROS publisher?](https://www.theconstruct.ai/wp-content/uploads/2018/08/what-is-publisher.png)