ROS2 parameters are great for configurable nodes that you can adapt to your robot configuration simply by changing a configuration file or a launch file. However, if we just implemented the basics you will have to re-run your node each time you change a parameter. You can’t change the parameter on-the-fly and have it updated in the robot. But by adding a callback function that updates the variables in our code, it is possible to do a live parameter update while a program is running, removing the need for a tedious node restart. Learn how to do it in this post.
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/53e75e28/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn how to enable live parameter updates (C++) – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Starting the simulation
After having opened the rosject, let’s start a simulation. For that, let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Once inside the terminal, let’s run the commands below:
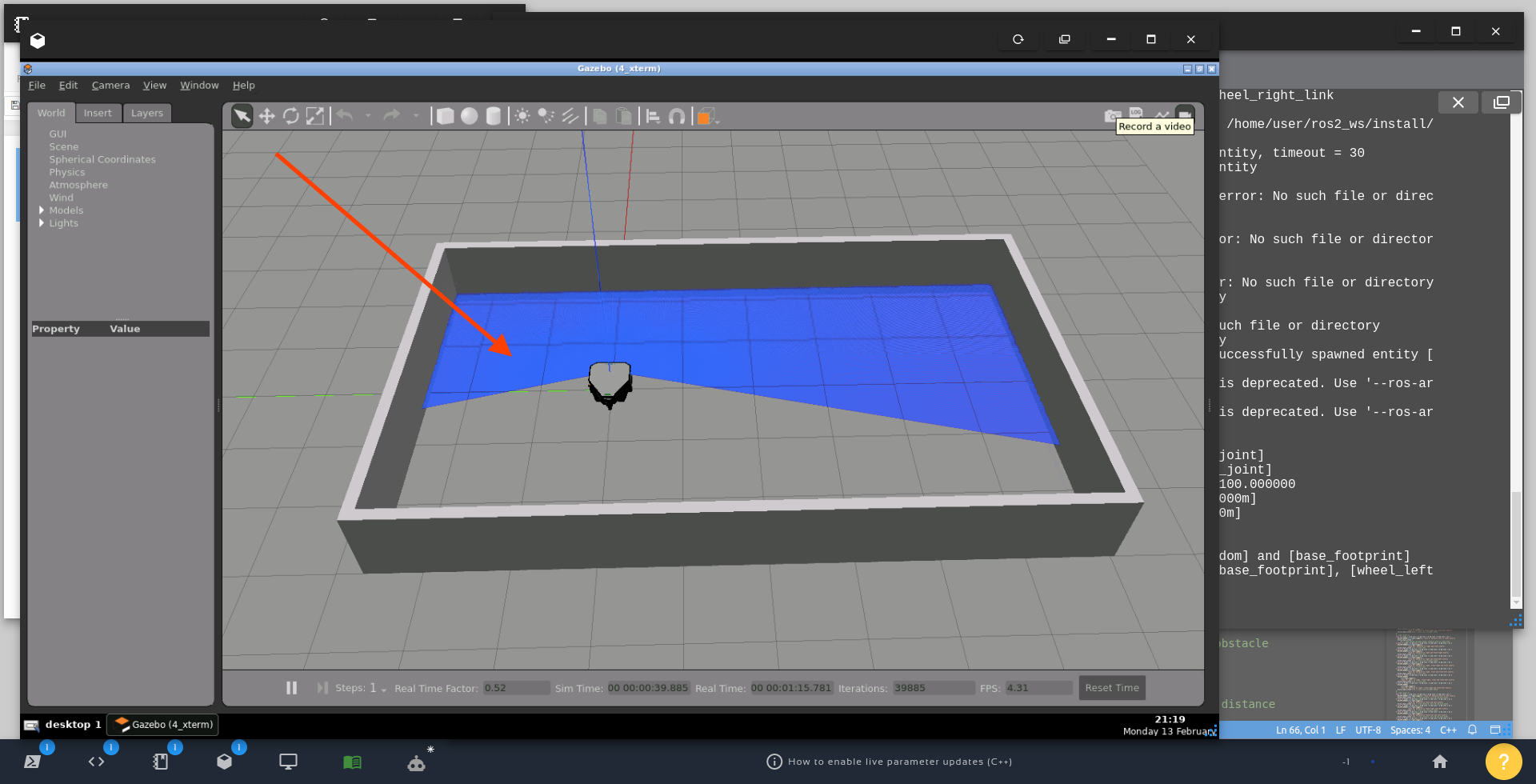
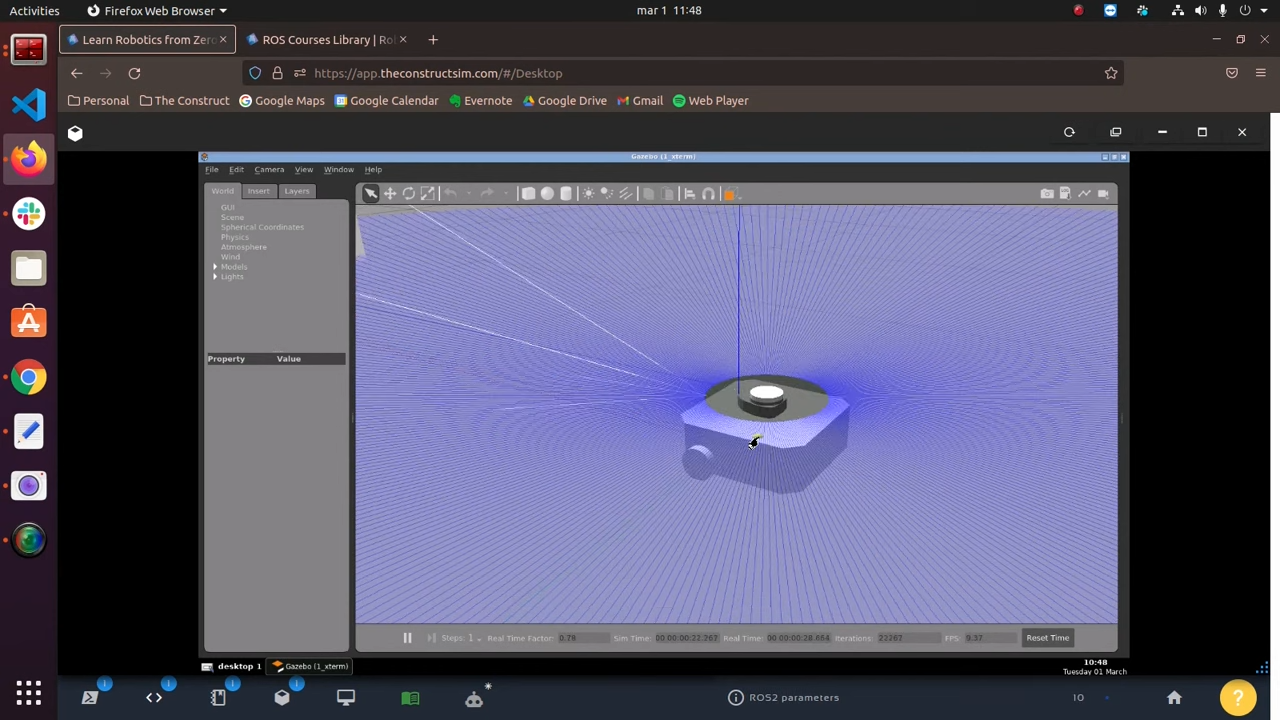
If everything went well, you should have a simulation loaded and opened automatically in a few seconds. The simulation will open from a top view, but you can use the mouse to move the simulation to a different perspective.
How to enable live parameter updates (C++)
Understanding the problem
Below is an example node in which we have only implemented the barebone basics of parameters in ROS2.
Let’s see it in action and see how it behaves, especially when we update its parameter values.
In a second terminal, let’s run the node for Obstacle Avoidance.
source ~/ros2_ws/install/setup.bash
ros2 run rule_based_obstacle_avoidance obstacle_avoidance
If you watch the simulation for a while, you will see that when the robot detects the wall, it rotates and moves forward until it detects another wall, and repeats the process.
The node name is obstacle_avoidance_node (you can check it in a third terminal by running: ros2 node list)
Now, let’s list the parameters of the node in a third terminal:
Now, still in the third terminal, let’s check the value of the safety_distance parameter:
ros2 param get /obstacle_avoidance_node safety_distance
The output we should have got should be the following:
Double value is: 1.5
Now, let’s set the parameter to a new value:
ros2 param set /obstacle_avoidance_node safety_distance 1.0
The expected output is:
Set parameter successful
Ok, so far so good. But with the new value, we expect the robot to get closer to the wall before turning around because now the safe distance was set from 1.5 meters to 1.0. The problem is that the robot is not considering the new value that we just set.
We can follow the same idea to try to make the robot move faster. Let’s check the current velocity of the robot:
ros2 param get /obstacle_avoidance_node linear_x_velocity
The output we should have got should be the following:
Double value is: 0.2
If we increase the speed:
ros2 param set /obstacle_avoidance_node linear_x_velocity 0.5
The expected output is:
Set parameter successful
The parameter was reported as successfully set, yet the robot does not move faster, because it still uses the value loaded when the node started.
In the current code, parameter values are fixed. As such, every time a parameter value changes, the parameter value in the code stays the same even though you may have expected it to update based on the latest value set.
In order to solve this, we must add a parameter callback function to your code so that the variable in the code gets the freshest data.
Before moving to the next section, please kill the simulation and all nodes running by pressing Ctrl+C on all terminals.
Solution: Add a parameter callback method
Alright, have you closed all programs by pressing CTRL+C on all terminals?
If you check around line 45 on that file, you will find the “private:” section, where we define the private variables of our class, something like the following:
Now, above that “private:” section, around line 38, let’s add the following code to instantiate a ParameterEventHandler, providing the current ROS node to use to create the required subscriptions:
Below the param_subscriber_ we have to set a callback method, in this case, a lambda function:
// Set a callback for this node's parameter, "linear_x_velocity"
auto callback_linear_x = [this](const rclcpp::Parameter &p) {
RCLCPP_INFO(this->get_logger(),
"callback_linear_x: Received an update to parameter \"%s\" "
"of type %s: \"%f\"",
p.get_name().c_str(), p.get_type_name().c_str(),
p.as_double());
linear_x_velocity_ = p.as_double();
};
Then we set “callback_linear_x” as the callback to invoke whenever linear_x_velocity is updated. We store the handle that is returned by “add_parameter_callback“; otherwise, the callback will not be properly registered.
Now that our package has been rebuilt and sourced, let’s launch the simulation again:
ros2 launch neo_simulation2 simulation.launch.py
The simulation should have been opened just like before, but now we will see the parameters affecting the simulation in “real-time”.
Before changing the parameters, let’s also launch the Obstacle Avoidance node, just like before, using the second terminal:
ros2 run rule_based_obstacle_avoidance obstacle_avoidance
You should see the robot approaching the wall, and turning around when getting close to it.
Changing the x velocity using ROS 2 Parameters
Ok, now that the robot is moving, let’s retrieve again the current value of the linear x velocity using the third terminal:
ros2 param get /obstacle_avoidance_node linear_x_velocity
Just like before, the expected output is:
Double value is: 0.2
Now let’s change that value:
ros2 param set /obstacle_avoidance_node linear_x_velocity 1.0
We expect a successful output:
Set parameter successful
If you look at the simulation now, you should see that when the robot is moving forward (not turning around), it moves really faster. So, as we can see, we are now able to make ROS2 Parameters be reflected “instantly”.
This opens up really many different possibilities.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, you will learn how to create ros2 XML launch files. You’ll discover how ros2 XML launch files are similar to and different from their ros1 counterparts.
Step 1: Get a Copy of the ROS package containing the code used in the post
Click here to copy the project. It would be copied to your cloud account at The Construct. That done, open the project using the Run button. This might take a few moments, please be patient.
PS: If you don’t have an account on the The Construct, you would need to create one. Once you create an account or log in, you will be able to follow the steps to read and write parameters in ros1 and ros2.
You might also want to try this on a local PC if you have ROS installed. In that case you need to read on and duplicate the source code of the package in your own local workspace. However, please note that we cannot support local PCs and you will have to fix any errors you run into on your own.
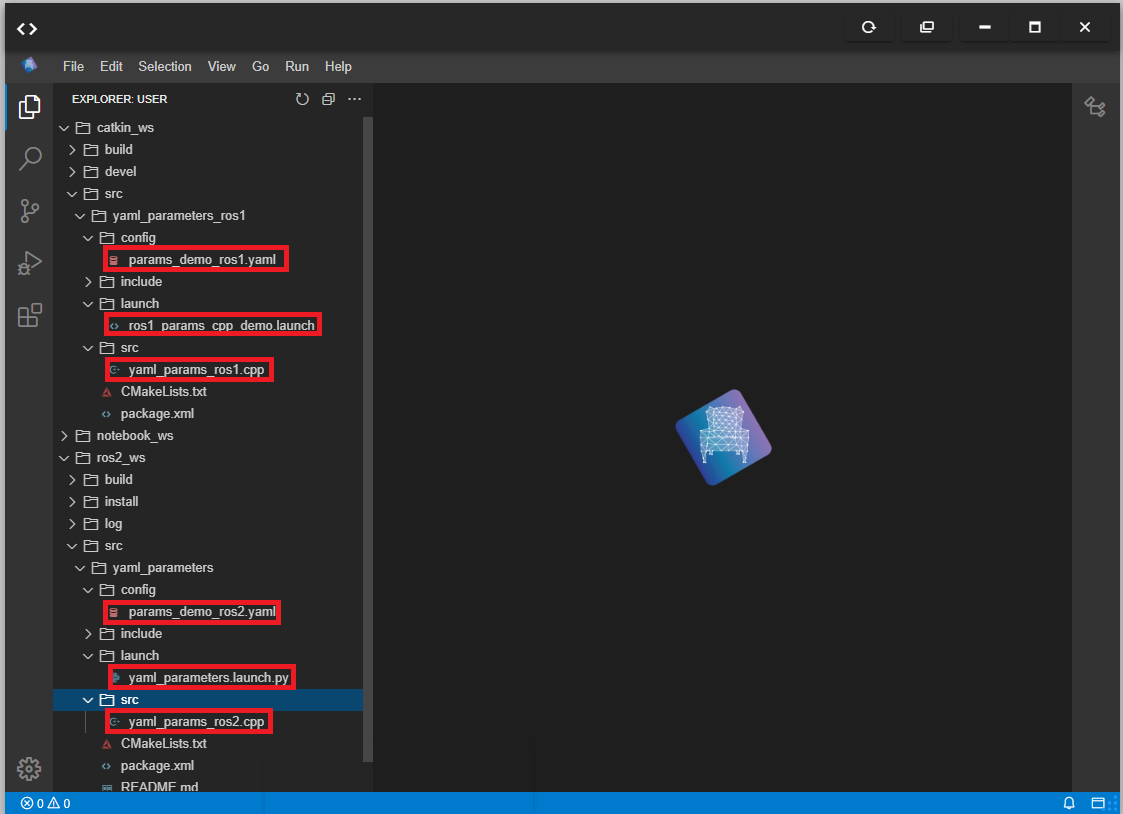
Step 2: Explore the source code using the IDE
Open the IDE by clicking on the icon as shown above. You should now see something similar to the image below:
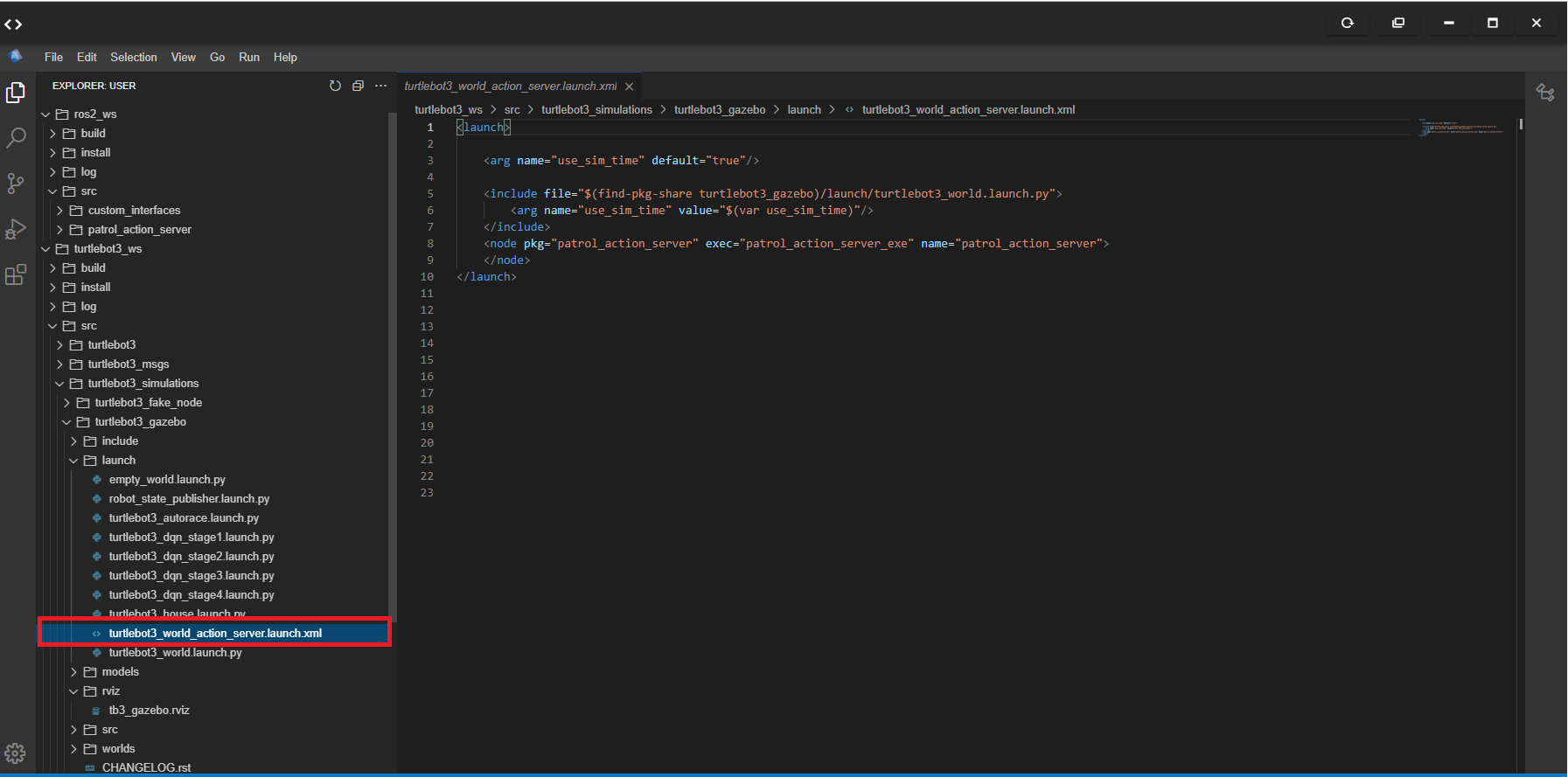
The main file we will work with in this post is the one highlighted in red in the image above:
Double-click on the file in the IDE to open and study the contents. We will discuss this file in the following steps.
Step 3: Understand how to create ros2 XML launch files
Wait first! I thought ros2 launch files are only written in Python! Yes, Python is one of the options when writing ros2 launch files; we can also use XML files, especially if we are writing simple launch files that do not need to leverage Python’s powerful API.
On line 2, we define an argument (variable) use_sim_time with a default value of true.
On line 3, we include another launch file, turtlebot3_world.launch.py for launching the TurtleBot3 world. The launch file can be found in the turtlebot3_gazebo package.
On line 4, we pass a required argument use_sim_time to the included launch file, assigning it the value of the use_sim_time defined on line 2.
On line 6, we define a node to be started by the launch file. This node can be found in the package patrol_action_server, the node executable is patrol_action_server_exe and the name of the node would appear as patrol_action_server.
In short, this launch file launches the TurtleBot3 world and starts the Patrol action server. The same launch file can be written in Python, but this XML looks simpler and easier to understand. And it does all we want it to do, and we can even include Python-based launch files!
Step 4: Understand how ros2 XML launch files are similar to/different from ros1 XML launch files
If you are familiar with ros1 launch files, you should already notice some similarities:
The same <launch> tag.
Similar <arg> tag.
Familiar <include> tag.
Similar <node> tag.
Now if we were writing the same launch file in ros1, it would be something like this (PS: we can’t include ros2 launch file in a ros1 launch file in reality):
Did you like this post? Do you have any questions about how to read and write parameters in ros1 and ros2? Whatever the case, please leave a comment on the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS topics, please let us know in the comments area and we will do a video or post about it.
In this post, you will learn how to read and write parameters in ros1 and ros2, using C++ nodes. You will see the slight differences in the ros1 and ros2 nodes and parameter files.
Step 1: Get a Copy of the ROS package containing the code used in the post
Click here to copy the project. It would be copied to your cloud account at The Construct. That done, open the project using the Run button. This might take a few moments, please be patient.
PS: If you don’t have an account on the The Construct, you would need to create one. Once you create an account or log in, you will be able to follow the steps to read and write parameters in ros1 and ros2.
You might also want to try this on a local PC if you have ROS installed. In that case you need to read on and duplicate the source code of the package in your own local workspace. However, please note that we cannot support local PCs and you will have to fix any errors you run into on your own.
Step 2: Explore the source code using the IDE
Open the IDE by clicking on the icon as shown above. You should now see something similar to the image below:
The six main files we will work with in this post are highlighted in red in the image above. These files are:
Double-click on each of the files in the IDE to open and study the contents. We will examine some of these files in the following steps.
Step 3: Understand how to read and write (load) parameters in ROS1
Now it’s time to see how to read and write parameters in ros1, working in the ros1 workspace.
Open a web shell and run the following commands:
cd ~/catkin_ws
source /opt/ros/noetic/setup.bash
source devel/setup.bash
roscore
The code block above changes to the ros1 workspace, sources it, and then starts the roscore (needed for ros1). Now let’s see a list of the current ros1 parameters available. Open another web shell and type the following:
But wait…are we getting the parameters in the YAML file (catkin_ws/src/yaml_parameters_ros1/config/params_demo_ros1.yaml) and their correct values? Let’s see what’s the in there!
Gosh, we are not getting these parameters nor their values, and you probably know why! So far we have been reading the parameters but have loaded them. Now let’s get that done: enter the launch file catkin_ws/src/yaml_parameters_ros1/launch/ros1_params_cpp_demo.launch.
Can you spot the differences between the formal and the latter outputs of these commands? Sure you can! So, well, that’s how to read and load parameter in ros1!
Step 4: Understand how to read and write (load) parameters in ROS2
Now let’s change to the ros2 workspace.
cd ~/ros2_ws
source /opt/ros/foxy/setup.bash
source install/setup.bash
In ros2 we need to have a node running before we can check for parameters, because there is no parameter server in ros2. Let’s try running the node then. The logic behind this node is contained in the ros2_ws/src/yaml_parameters/src/yaml_params_ros2.cpp file:
#include <rclcpp/rclcpp.hpp>
class MainNode : public rclcpp::Node {
public:
MainNode() : rclcpp::Node("node", rclcpp::NodeOptions()) {
// example: declare parameters, default value given
declare_parameter("param0", 1);
declare_parameter("param1", 0.1);
declare_parameter("param2", "default");
declare_parameter("param3.weight", 1);
declare_parameter("param3.name", "default");
declare_parameter("param4", false);
// example: declare a variable when declaring a parameter
declare_parameter("param5", std::vector<bool>(3, false));
declare_parameter("param6", std::vector<int64_t>(4, 1));
declare_parameter("param7", std::vector<double>(4, 0.1));
declare_parameter("param8", std::vector<std::string>(5, "default"));
// Get parameter values one by one
auto p0 = get_parameter("param0").as_int();
auto p1 = get_parameter("param1").as_double();
auto p2 = get_parameter("param2").as_string();
auto p3weight = get_parameter("param3.weight").as_int();
auto p3name = get_parameter("param3.name").as_string();
auto p4 = get_parameter("param4").as_bool();
auto p5 = get_parameter("param5").as_bool_array();
auto p6 = get_parameter("param6").as_integer_array();
auto p7 = get_parameter("param7").as_double_array();
auto p8 = get_parameter("param8").as_string_array();
// Print parameters
RCLCPP_INFO(get_logger(), "Integer parameter: %ld", p0);
RCLCPP_INFO(get_logger(), "Double parameter: %f", p1);
RCLCPP_INFO(get_logger(), "String parameter: %s", p2.c_str());
RCLCPP_INFO(get_logger(), "Nested integer parameter: %ld", p3weight);
RCLCPP_INFO(get_logger(), "Nested string parameter: %s", p3name.c_str());
RCLCPP_INFO(get_logger(), "Boolean parameter: %d", p4);
RCLCPP_INFO(get_logger(), "Boolean vector parameter [0]: %d",
static_cast<int>(p5[0]));
RCLCPP_INFO(get_logger(), "Integer vector parameter [0]: %d",
static_cast<int>(p6[0]));
RCLCPP_INFO(get_logger(), "Double vector parameter [0]: %f",
static_cast<double>(p7[0]));
RCLCPP_INFO(get_logger(), "String vector parameter [0]: %s", p8[0].c_str());
}
};
int main(int argc, char **argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MainNode>());
rclcpp::shutdown();
return 0;
}
No, we are not :(. But not to worry, the launch file ros2_ws/src/yaml_parameters/launch/yaml_parameters.launch.py comes to the rescue! Let’s examine its content.
#!/usr/bin/env python3
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
def generate_launch_description():
return LaunchDescription([
Node(
package='yaml_parameters',
executable='main_node',
name='parameter_types_example',
parameters=[os.path.join(
get_package_share_directory('yaml_parameters'),
'config', 'params_demo_ros2.yaml')],
output='screen'),
])
Oh my, it’s a Python! Let’s set it loose and see what happens! Stop the currently running program with Ctrl + C and run the following in its place and check that your output is similar.
The launch file simply loads the parameters in the YAML file and also runs the node we run earlier.
Well, that’s it!
Step 5: Check your learning
Do you understand how to read and write parameters in ros1 and ros2, using C++ nodes?
Did you notice the slight differences in the format of the YAML files for ros1 and ros2?
Did you notice that you the ros2 parameters are tied to specific nodes vs existing in a parameter server in ros1?
If you didn’t get any of the points above, please go over the post again, more carefully this time.
Extra Step: Watch the video to understand how to read and write parameters in ros1 and ros2
Here you go:
Feedback
Did you like this post? Do you have any questions about how to read and write parameters in ros1 and ros2? Whatever the case, please leave a comment on the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS topics, please let us know in the comments area and we will do a video or post about it.
Before we start really using ROS2 parameters, let’s understand key points about them:
Parameters in ROS2 are implemented/attached to/served by each node individually, as opposed to the parameter server associated with roscore in ROS1, therefore, when the node dies, so do its parameters. This is easier to understand if you already know that in ROS2 we do not have roscore.
Parameters can be loaded at the node startup or while the node is running
Having this in mind, our life now understanding ROS2 params is going to become easier.
Opening the rosject
In order to learn how to load and retrieve ROS2 Parameters, we need to have ROS installed in our system, and it is also useful to have some simulations. We already prepared a rosject with a simulation for that: https://app.theconstructsim.com/#/l/4875b2e0/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject.
Learn ROS2 Parameters – Run rosject
After pressing the Run button, you should have the rosject loaded. Let’s now head to the next section to really get some real practice.
Launching the turtlebot simulation with ROS2
In order to launch the simulation, let’s start by opening a new terminal:
Open a new Terminal
After having the first terminal open, let’s run the following commands to launch a simulation:
Wait some seconds until the simulation is loaded. If for any reason the simulation does not load and you see error messages like the following:
[INFO] [1649093592.180346898] [spawn_entity]: Waiting for service /spawn_entity
[ERROR] [1649093597.566604708] [spawn_entity]: Service %s/spawn_entity unavailable. Was Gazebo started with GazeboRosFactory?
[ERROR] [1649093597.567565097] [spawn_entity]: Spawn service failed. Exiting.
[ERROR] [spawn_entity.py-4]: process has died [pid 1007, exit code 1, cmd '/opt/ros/galactic/lib/gazebo_ros/spawn_entity.py -entity waffle_pi -file /home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/turtlebot3_waffle_pi/model.sdf -x 0.0 -y 0.0 -z 0.01 --ros-args']
you can just abort the current command by pressing CTRL+C in the terminal, then run the last command “ros2 launch turtlebot3_gazebo empty_world.launch.py” again.
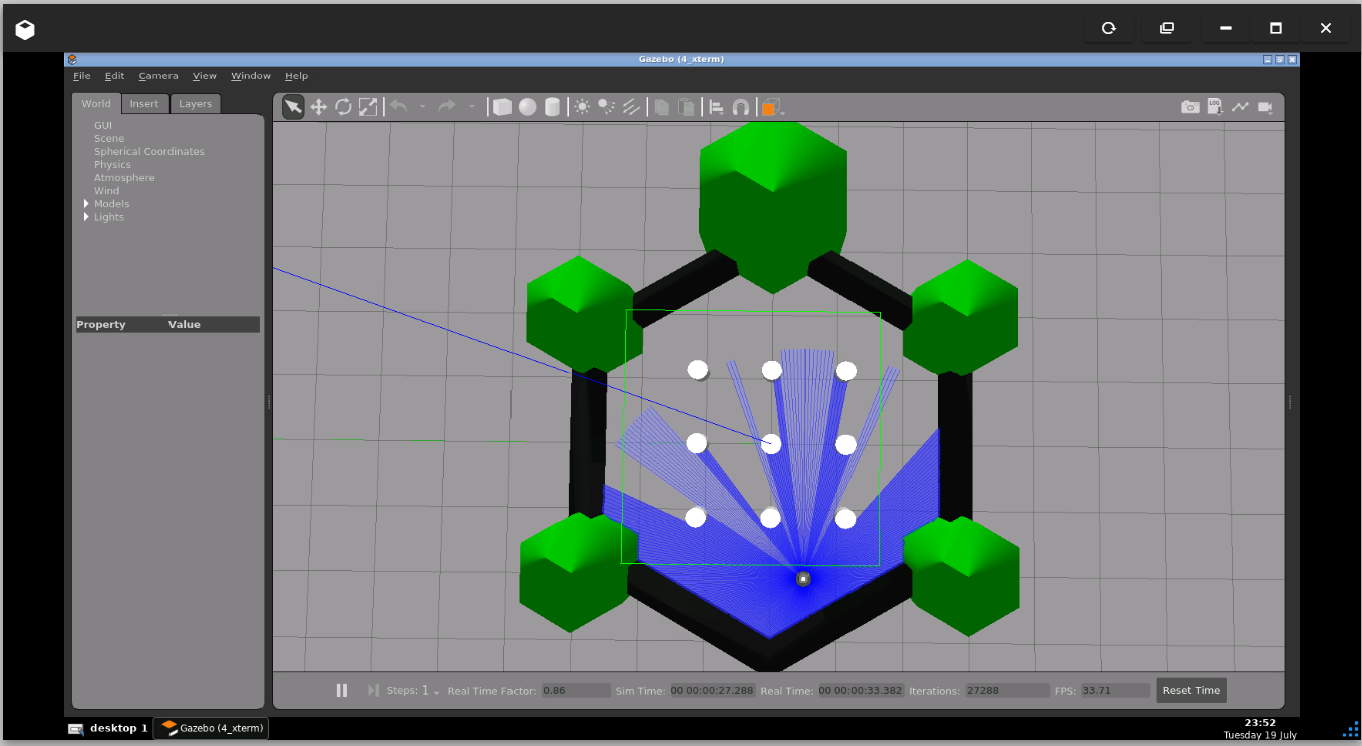
If everything loaded fine, you should have a Turtlebot Waffle PI simulation running:
Turtlebot Waffle PI – How to use ROS2 parameters
Checking ROS2 Topics to ensure the simulation is ok
Now that our simulation is running, we can check the topics just to make sure everything loaded as expected.
For that, let’s open a second terminal and type the following command:
ros2 topic list
If you see the following list of topics, then everything has loaded fine:
If you look carefully in the list of topics, we have the topic /cmd_vel. We are going to use it to send velocity commands to the robot using ROS parameters.
Understanding the parameter_tests package
So far so good. It is now time to check the structure of our workspace. Let’s start by opening our Code Editor:
Open the IDE – Code Editor
After having the IDE open, under ros2_ws/src you should find a package named parameter_tests.
Inside that package, there is also a folder named parameter_tests with a file named parameter_tests_node.py. Please click on that file to open it and analyze its code.
The code is the following:
import rclpy
import rclpy.node
from rcl_interfaces.msg import ParameterDescriptor
from geometry_msgs.msg import Twist
class VelParam(rclpy.node.Node):
def __init__(self):
super().__init__('param_vel_node')
self.timer = self.create_timer(0.1, self.timer_callback)
self.publisher = self.create_publisher(Twist, 'cmd_vel', 10)
self.msg = Twist()
param_descriptor = ParameterDescriptor(
description='Sets the velocity (in m/s) of the robot.')
self.declare_parameter('velocity', 0.0, param_descriptor)
# self.add_on_set_parameters_callback(self.parameter_callback)
def timer_callback(self):
my_param = self.get_parameter('velocity').value
self.get_logger().info('Velocity parameter is: %f' % my_param)
self.msg.linear.x = my_param
self.publisher.publish(self.msg)
def main():
rclpy.init()
node = VelParam()
rclpy.spin(node)
if __name__ == '__main__':
main()
If you check the main function, we are basically starting the ROS node, instantiating an object of our VelParam class, and spinning that node.
On the VelParam, one of the most important parts is where we define the param_descriptor. That param descriptor is what we use to set a parameter called velocity and define its initial value as 0.0.
Every certain amount of time (0.1 sec) the timer_callback method is called.
If we now check that timer_callback method, we see that it basically reads the velocity parameter and uses it to publish a velocity to the /cmd_vel.
Running the parameter_tests_node node
Now that we understand what our node does, it is time to run it.
For that, let’s open a third terminal and run the following command:
ros2 run parameter_tests param_vel
You should see constant messages like the following:
[INFO] [1649095105.555241669] [param_vel_node]: Velocity parameter is: 0.000000
[INFO] [1649095105.559028822] [param_vel_node]: Velocity parameter is: 0.000000
[INFO] [1649095105.583306104] [param_vel_node]: Velocity parameter is: 0.000000
...
We see that the initial value of the velocity parameter is 0 (zero).
Checking ROS Parameters using the terminal
Ok, so far we see everything is working, and we were are able to set and retrieve the ROS Param using Python.
Now let’s list the parameters to identify our velocity param. Let’s open a third terminal and type ros2 param list. The output should be similar to the following:
The node we are interested in is the param_vel_node. In the output above, we can easily identify our velocity param there:
user:~$ ros2 param list
/param_vel_node:
use_sim_time
velocity
the use_sim_time is a parameter that comes in every node.
Moving the robot using ROS Parameter
That that we have the param_vel_node with the velocity param, we can easily set a value to that parameter with the following command:
ros2 param set /param_vel_node velocity 0.2
After running this command, you should see that the robot started moving.
If you also check the terminal where we launched our node, it should say the current value or our parameter:
[INFO] [1649096658.093696410] [param_vel_node]: Velocity parameter is: 0.200000
[INFO] [1649096658.181101399] [param_vel_node]: Velocity parameter is: 0.200000
[INFO] [1649096658.281628131] [param_vel_node]: Velocity parameter is: 0.200000
Remember that you can easily set the parameter to 0.0 again to stop the robot:
ros2 param set /param_vel_node velocity 0.0
Dumping ROS Parameters into a YAML file (YAML format)
Now that we saw that we can easily move the robot back and forth using ROS parameters, in case you need to somehow dump the parameters, you can easily do it with:
cd ~/ros2_ws/src/parameter_tests/config
ros2 param dump /param_vel_node
The command will generate a file named ./param_vel_node.yaml with the following content (after we have set the velocity to 0.0 again):
Loading ROS Parameters when running Node using YAML files
All right, so far we have learned how to set parameters using Python and using the command line directly through ros2 param set. Now the time has come to also learn how to launch a node and set the parameters from a YAML file.
Before we do that, feel free to change the velocity value in the param_vel_node.yaml file.
Please, go to the second terminal where you launched the node and press CTRL+C to kill it. The simulation should be kept running.
Now, launch the node again, but now loading the parameters from the YAML file using the following command:
ros2 run parameter_tests param_vel --ros-args --params-file /home/user/ros2_ws/src/parameter_tests/config/param_vel_node.yaml
Based on the logs that are printed on the screen, you should be able to see that the parameters were correctly loaded from the YAML file.
Loading ROS Parameters using launch files directly
Up to now, we were launching our node using ros2 run, but if you are familiar with ROS, you may know that we can also use ros2 launch to launch ROS2 nodes.
If you check carefully the rosject, you will find a launch file under the following path:
Congratulations, you now know all the basics about ROS Parameters in ROS2.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses: