Sa maikling gabay na ito, ating dadaluban nang pahapyaw ang konsepto ng ROS2 Services at kung paano gumawa ng Service Server.
Bilang gabay sa mga tatalakayin ng proyektong ito, sila ay nakalista bilang mga sumusunod:
1. Introduksyon sa Kurso 2. Pagpapahayag ng Konsepto ng ROS2 Services 3. Paglikha at Paggamit ng ROS2 Service sa Pamamagitan ng Isang Service Server
– Dulo ng Buod –
Unit 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian
Para sa kursong ito, tinataya ng may-akda na may kaalaman ka na sa pangunahing operasyong pang-terminal ng mga sistemang gumagana sa Ubuntu 22.04 LTS na OS at maging sa pangunahing nabigasyon and commands na ginagamit sa mga Linux terminals. Kung nais mo pang matuto ng mga programming fundamentals na kailangan para sa pag-aral ng ROS, mangyaring tumungo at tignan ang kursong Code Foundation for ROS Learning Path ng The Construct! Tiyak na matututunan mo ang lahat ng kailangan mong kaalaman upang masimulan mo na ang paggamit ng ROS!
At kung interesado ka na rin sa kung paano gumawa ng mga packages at nodes sa ROS2, mangyaring tignan mo na rin ang gabay na ito: How to Create Packages and Nodes in ROS2
Sa tutorial na ito, Gagamitin natin ang ROSject platform na handog ng TheConstruct! Subalit, kung nais niyong gumamit ng sariling virtual machine o computer, mangyaring gawing gabay ang OS-to-Distribution compatibilities na siyang ibinahagi ng opisyal na dokumentasyon ng ros.org para sa ROS2 Humble Hawksbill
* ROS2 Humble Hawksbill: PC o Virtual Machine na may Ubuntu 22.04 LTS
Unit 2: ROS2 Services
Noong nakaraan, ating tinalakay ang kalikasan ng iba’t-ibang interfaces na maaari nating gamitin sa ROS2, partikular na ang mga mesages. Ngayon, atin namang tatalakayin ang konsepto ng mga Services!
Bilang panguna, ano nga ba ang mga ROS2 Services?
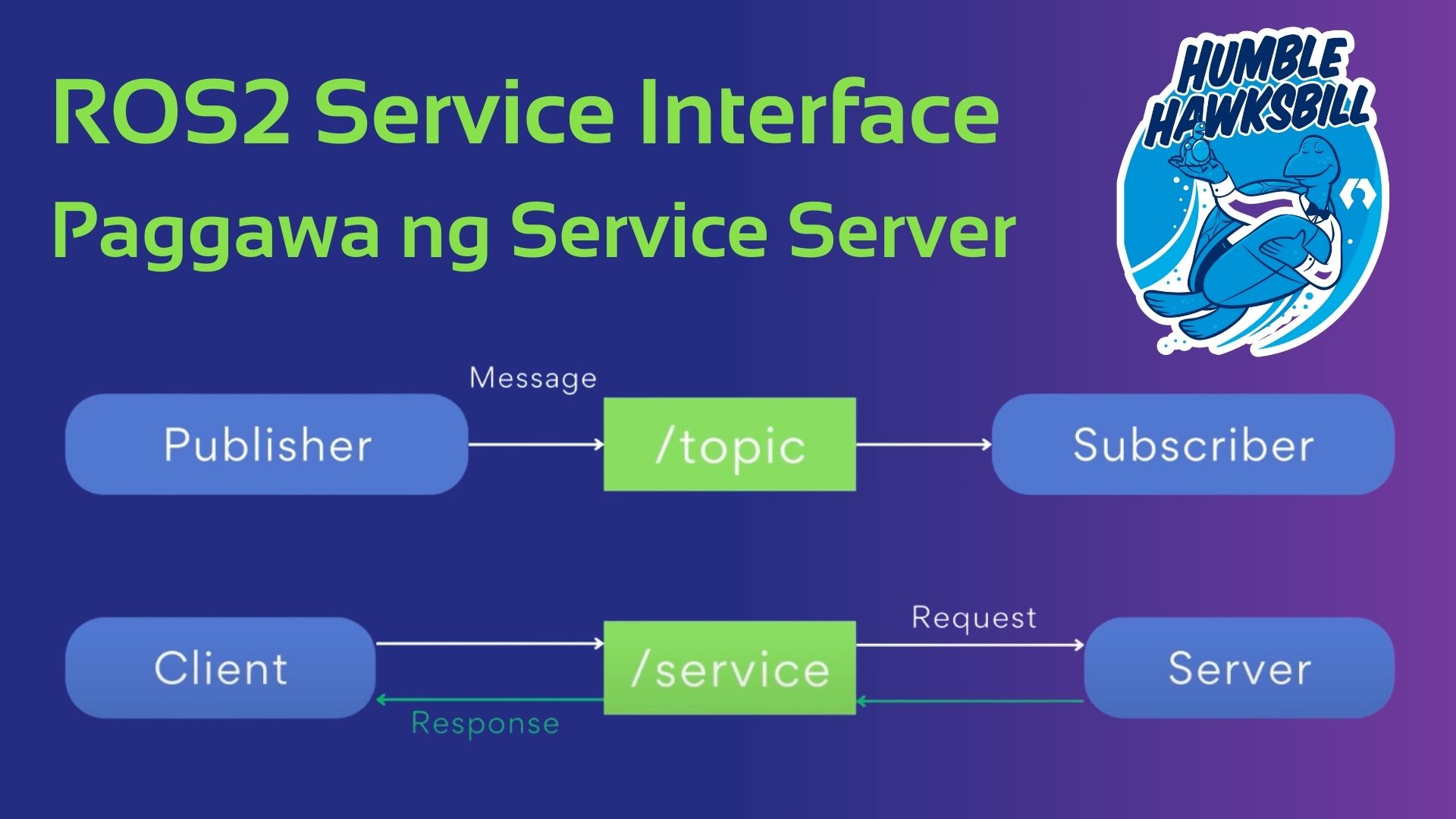
Kung ating aalalahanin, ang mga ROS2 messages ay naglalaman lamang ng isang lipon ng mga variable na maaari nating gamitin para sa ugnayang publisher-subscriber. At dahil sa ganitong istruktura, masasabing unidirectional lamang ang nagaganap na komunikasyon. Ang kahulugan nito ay walang interaksyon o feedback mechanism na nagaganap sa pagitan ng mga nodes. Ngayon, ang services naman ay siyang nagtataglay ng dalawang pangunahing fields — ang request at response.
Ang request field ay siyang lipon ng mga variable na, mula sa client, ay kukunin ng isang server mula sa isang service, at siyang gagamitin upang makapgpabalik ng tinatawag na response. Maaari natin itong ihalintulad sa proseso ng pagtala natin ng order mula sa isang kainan. Tayo ang nagsisilbing mga client, ang mga staff ang silang itinuturing na service, at ang kainan naman ang mismong server. Bale, magpapadala tayo ng ating request — depende sa kung ano ang ating nais na kainin (request)– at ito naman ay ipapadala sa kusina (server) sa pamamagitan ng mga staff (service), at pagtapos nang lutuin ay siyang ibibigay sa atin (response).
Kung ating ihahalintulad ang arkitektura nito sa ugnayang publisher-subscriber, maituturing nating katimbang ng publisher ang service client na siyang nagpapadala ng mga message. At maituturing nating kahalintulad ng /topic ang /service na siyang nagsisilbing channel upang mapadala at matanggap ang mga ito. Ang pinakamalaking pinagkaiba lamang sa konteksto ng client-server na ugnayan ay ang pagkakaroon ng tinatawag na response. Sa publisher-subscriber, matapos na matanggap ng subscriber ang message mula sa topic, wala na itong ibinabalik na value para sa node na nagpadala ng naturang halaga na iyon; subalit, para naman sa client-server na ugnayan, magpapadala ng request ang client at ibabalik naman ng server ang response.
Ngayon at malinaw na sa atin ang konsepto ng Services at ang Client-Server na uganayan, halina’t gumawa tayo ng Server!
Unit 3: Paglikha at Paggamit ng ROS2 Service sa Pamamagitan ng Isang Service Server
1. Lumikha ng Workspaces folder na siyang maglalaman ng lahat ng ating workspaces
# In Terminal 1
user@user:~$ mkdir Workspaces
2. Sa loob nito, gumawa ng ating workspace folder – ros2_ws – at sa loob ng workspace folder na ito, gumawa ng isa pang ‘src’ folder na siyang maglalaman ng ating package na siyang papangalanang ‘simple_adder’
# In Terminal 1
user@user:~$ cd Workspaces
user@user:~/Workspaces$ mkdir ros2_ws
user@user:~/Workspaces$ cd ros2_ws
user@user:~/Workspaces/ros2_ws$ mkdir src
user@user:~/Workspaces/ros2_ws$ cd src
user@user:~/Workspaces/ros2_ws/src$ ros2 pkg create simple_adder --build-type ament_python --dependencies rclpy std_msgs example_interfaces
3. Buuin ang naturang workspace
user@user:~/Workspaces/ros2_ws$ colcon build
4. Sa loob nito, gawin natin ang ating server file – simple_adder_server.py – at gawin itong executable
user@user:~/Workspaces/ros2_ws$ cd src/simple_adder/simple_adder
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ touch simple_adder_server.py
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ chmod +x simple_adder_server.py
5. Source Code para sa simple_adder_server.py
#!/usr/bin/env python3
# Import necessary libraries | I-import ang mga kinakailangang library
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoInts
class SimpleAdderNode(Node):
def __init__(self):
super().__init__("simple_adder")
# Likhain ang server
self.server_ = self.create_service(AddTwoInts, "add_ints_service", self.callback_add_ints_service)
# Gumawa ng logger upang malaman kung gumagana na ang server
self.get_logger().info("Add Ints Server Currently Active!")
# Ilikha ang callback para sa ginawang server. Dito mangyayari ang pagproproseso ng requests upang makapagpadala ng response
def callback_add_ints_service(self, request, response):
response.sum = request.a + request.b
self.get_logger().info("The sum of "+str(request.a)+" and "+str(request.b)+" is "+str(response.sum))
return response
def main(args=None):
rclpy.init(args=args)
node = SimpleAdderNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__=="__main__":
main()
6. I-install ang node sa loob ng setup.py
# Hanapin ang console scripts sa ilalim ng setup.py at idagdag ang mga ito:
"simple_adder_server=simple_adder.simpler_adder_server:main"
7. Muling buuin ang package
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ cd ../../../
user@user:~/Workspaces/ros2_ws$ colcon build --packages-select simple_adder --symlink-install
user@user:~/Workspaces/ros2_ws$ ros2 run simply_adder simple_adder_server
10. Sa isa pang terminal, i-source ang install/setup.bash ng naturang workspace
user@user:~$ cd Workspaces/ros2_ws
user@user:~/Workspaces/ros2_ws$ source install/setup.bash
11. Tawagin ang naturang server
user@user:~/Workspaces/ros2_ws$ ros2 service call add_ints_server example_interfaces/srv/AddTwoInts "{a: 5, b: 10}"
At ayan! Matagumpay tayong nakalikha ng Service Server at matawag ang service nito! Kapag tapos ka nang magsiyasat, maaarin mong pindutin ang “ctrl + c” upang patayin na ang naturang node. At diyan nagtatapos ang ating maikling gabay hinggil sa paggawa ng custom messages! Nawa’y may natutunan kayong bago na makatutulong sa inyong pag-aaral ng ROS!
Para sa iba pang mga ROSject na tulad nito, mangyaring bisitahin ang The Construct. Nag-aalok sila ng napakaraming praktikal na mga gabay sa ROS mula sa mga payak hanggang sa mga konseptong pangbihasa na!
Hanggang sa muli! Ito si Christian C. Anabeza, ang inyong FIlipino Robotics Ambassador!
This tutorial is created by Robotics Ambassador Christian
Unit 1 Introduksyon sa Kurso
– Buod –
Tinatayang Oras na Kakailanganin: 30 minuto
Mabuhay!
Sa maikling gabay na ito, ating dadaluban kung ano nga ba ang mga ROS2 Messages at paano natin magagamit ang mga ito sa ating paggawa ng mga robots.
Bilang gabay sa mga tatalakayin ng proyektong ito, sila ay nakalista bilang mga sumusunod:
1. Introduksyon sa Kurso 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian 2. Pagpapahayag ng Konsepto ng ROS2 Messages 3. Praktikal na Halimbawa: Paggawa ng Sariling Message at Paggamit nito sa uganayang publisher-subscriber
– Dulo ng Buod –
Unit 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian
Para sa kursong ito, tinataya ng may-akda na may kaalaman ka na sa pangunahing operasyong pang-terminal ng mga sistemang gumagana sa Ubuntu 22.04 LTS na OS at maging sa pangunahing nabigasyon and commands na ginagamit sa mga Linux terminals. Kung nais mo pang matuto ng mga programming fundamentals na kailangan para sa pag-aral ng ROS, mangyaring tumungo at tignan ang kursong Code Foundation for ROS Learning Path ng The Construct! Tiyak na matututunan mo ang lahat ng kailangan mong kaalaman upang masimulan mo na ang paggamit ng ROS!
At kung interesado ka na rin sa kung paano gumawa ng mga packages at nodes sa ROS2, mangyaring tignan mo na rin ang gabay na ito: How to Create Packages and Nodes in ROS2
Sa tutorial na ito, Gagamitin natin ang ROSject platform na handog ng TheConstruct! Subalit, kung nais niyong gumamit ng sariling virtual machine o computer, mangyaring gawing gabay ang OS-to-Distribution compatibilities na siyang ibinahagi ng opisyal na dokumentasyon ng ros.org para sa ROS2 Humble Hawksbill
* ROS2 Humble Hawksbill: PC o Virtual Machine na may Ubuntu 22.04 LTS
Unit 2: ROS2 Messages – Ano nga ba sila?
Sa kasalukuyan ay dapat pamilyar na tayo sa konsepto ng mga topics sa ROS2. Kung ating babalikan ang naging halimbawa noong nakaraan, ang mga ROS2 topics ay siyang mga nagsisilbing lagusan ng impormasyon kung saan maaari itong gamitin ng mga subscriber para mapatakbo ang isang feature ng robot. Ngayon naman’y ating dadaluban ang isa sa mga mahalagang aspeto ng mga ito at ito ang mga messages!
Sa ROS2, may tatlong pangunahing uri ng interface — ang messages, services, at actions. Sa gabay na ito, ating tatalakayin ang mga messages. Sa madaling salita, ang mga dokumentong ito ang siyang naglalaman ng mga variables na gagamitin ng ating robot o program hinggil sa pagpapagana ng naturang feature. Isang magandang halimbawa na nito ay ang Twist() message na gamit natin upang bigyan ng velocities and ating turtlesim.
Kung ating sisiyasatin ang laman ng Twist() message type, ito ang ating masisilayan: Vector3 linear Vector3 angular
At sa loob ng bawat Vector, ito naman ang laman nila:
Ibigsabihin nito ay mayroong tatlong posibleng velocities na pwedeng ipublish gamit ang message na ito. Ang mga linear velocities ay siyang tumutkoy sa paharap at palikod, pagilid, at pataas na galaw ng robot; habang ang mga angular naman ay tinatawag na pitch, yaw, at roll. Para sa mga groundbot, ang madalas gamitin na angular velocity ay ang yaw; habang para sa mga robot na panghimpapawid ay ginagamit ang anim na yan dahil mas marami ang kanilang Degrees of Freedom (DoF).
Ngayon, kung ating papansinin ang pagsulat ng mga messages sa ROS2, masasabi nating napakasimple ng kanilang istruktura. Ang tanging kailangan lamang na ilagay ay yung klase ng variable at yung pangalan nito — at hinggil naman sa pagpapangalan, dapat ay masimulan lamang ito sa kapital ng letra at ang file extension ay ‘.msg’.
<variable type> <variable name>
Ngayon at alam na natin kung ano sila, halina’t ating simulan ang paggawa at paggamit ng ating mga customized na ROS2 messages!
Unit 3: Paggawa ng Sariling Message at Paggamit nito sa Uganayang Publisher-Subscriber
Bilang panimula, tayo muna ay gumawa ng ating Workspaces folder na siyang maglalaman ng lahat ng ating workspace para sa ROS2.
# Sa Terminal 1
user:~$ mkdir Workspaces
Matapos niyan ay gumawa tayo ng workspace na ating papangalanang sample_ws. Mangyaring patakbuhin na rin ang ‘colcon build’ pagkatapos sa loob nito.
# Sa Terminal 1
user:~/Workspaces$ mkdir sample_ws
user:~/Workspaces$ colcon build
Para sa gabay na ito, gagawa tayo ng dalawang packages — una ay ating tatawaging ‘my_interface_pkg’ na siyang maglalaman ng ating custom message at ang isa naman ay ating tatawagin ‘use_custom_interface_pkg’ kung saan natin gagawin ang mga publisher at subscriber na gagamit ng ating nagawang interface.
Ngayon ay ating unahin muna ang ‘my_interface_pkg’
# Sa Terminal 1
user:~/Workspaces$ cd sample_ws
user:~/Workspaces/sample_ws$ mkdir src
user:~/Workspaces/sample_ws$ cd src
user:~/Workspaces/sample_ws/src$ ros2 pkg create my_interface_pkg --build-type ament_cmake --dependencies std_msgs rclcpp
Isang mahalagang konseptong alalahanin ay sa tuwing gagawa ng package para sa mga interfaces ay dapat na ament_cmake ang build type ng mga ito at nakadepende sa rclcpp. Subalit para sa paggawa ng nodes ay malaya tayong pumili kung nais nating gumamit ng python o cpp na environment.
Kasunod ng paggawa ng package ay gumawa tayo ng folder na ating papangalanang ‘msg’ sa loob ng my_interface_pkg. Mula rito ay gumawa na rin tayo ng ating message file na ating papangalanang ‘Numbers.msg’
# Sa Terminal 1
user:~/Workspaces/sample_ws/src$ cd my_interface_pkg
user:~/Workspaces/sample_ws/src/my_interface_pkg$ mkdir msg
user:~/Workspaces/sample_ws/src/my_interface_pkg$ cd msg
user:~/Workspaces/sample_ws/src/my_interface_pkg/msg$ touch Numbers.msg
Mangyaring kopyahin ang naturang code sa ilalim na siyang magiging laman ng Numbers.msg
int32 a
int32 b
Tumungo sa CMakeList.txt na file at idagdag ang sumusunod na mga linya:
cmake_minimum_required(VERSION 3.8)
project(my_interface_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(std_msgs REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rosidl_default_generators REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Numbers.msg"
)
ament_package()
Ngayon naman ay tumungo sa package.xml at idagdag ang mga sumusunod na sipi ng code:
Siguraduhing na-save ang lahat ng mga file at i-compile ang naturang package
# Terminal 1
user:~/Workspaces/sample_ws/src/my_interface_pkg/msg$ cd ../../../
user:~/Workspaces/sample_ws$ colcon build
Ngayon naman ay tumungo tayo sa paggawa ng publisher at subscriber na gagamit ng ating custom message.
Una, gumawa ng python package na ating papangalanang ‘use_custom_interface_pkg’
# Sa Terminal 1
user:~/Workspaces/sample_ws$ cd src
user:~/Workspaces/sample_ws/src$ ros2 pkg create use_custom_interface_pkg --build-type ament_python --dependencies rclpy std_msgs geometry_msgs my_interface_pkg
Para sa ating mga codes, atin itong ilalagay sa loob ng /use_custom_interface_pkg/use_custom_interface_pkg na directory at papangalanan natin ang publisher at subscriber bilang sumusunod:
Matapos i-code ang mga ito, mangyaring muling i-compile ang kabuuan ng ‘sample_ws’. At ngayon, atin nang patakbuhin ang ating mga nagawang node na gumagamit ng ating custom message!
# Sa Terminal 1
user:~/Workspaces/sample_ws/src/use_custom_interface_pkg/cd use_custom_interface_pkg$ cd ../../../
user:~/Workspaces/sample_ws$ colcon build
Para sa bahaging ito, i-source ang terminal 2 and 3 para sa sample_ws
# Sa Terminal 2 at 3
user:~$ cd Workspaces/sample_ws
user:~/Workspaces/sample_ws$ source install/setup.bash
Patakbuhin ang publisher at subscriber sa Terminal 2 at 3
# Sa Terminal 2
user:~/Workspaces/sample_ws$ ros2 run use_custom_interface_pkg custom_publisher
# Sa Terminal 3
user:~/Workspaces/sample_ws$ ros2 run use_custom_interface_pkg custom_subscriber
Ganito dapat ang lalabas sa iyong pagpapatakbo:
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=3, b=8, sum=11
[INFO] [1711264604.204593546] [custom_subscriber]: Received Numbers: a=3, b=5, sum=8
[INFO] [1711264604.187348953] [custom_subscriber]: Received Numbers: a=2, b=3, sum=5
[INFO] [1711264604.237378829] [custom_subscriber]: Received Numbers: a=4, b=4, sum=8
[INFO] [1711264604.142367827] [custom_subscriber]: Received Numbers: a=1, b=6, sum=7
...
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=7, b=9, sum=16
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=3, b=1, sum=4
At ayan!
Matagumpay nating nagawa ang ating custom message sa ROS2 at magamit ang mga ito sa publisher at subscriber! Kapag tapos ka nang magsiyasat, maaarin mong pindutin ang “ctrl + c” upang patayin na ang naturang node at maging ang simulation. At diyan nagtatapos ang ating maikling gabay hinggil sa paggawa ng custom messages! Nawa’y may natutunan kayong bago na makatutulong sa inyong pag-aaral ng ROS!
Para sa iba pang mga ROSject na tulad nito, mangyaring bisitahin ang The Construct. Nag-aalok sila ng napakaraming praktikal na mga gabay sa ROS mula sa mga payak hanggang sa mga konseptong pangbihasa na!
Hanggang sa muli! Ito si Christian C. Anabeza, ang inyong Filipino ROSbotics Ambassador!