ROS2 parameters are great for configurable nodes that you can adapt to your robot configuration simply by changing a configuration file or a launch file. However, if we just implemented the basics you will have to re-run your node each time you change a parameter. You can’t change the parameter on-the-fly and have it updated in the robot. But by adding a callback function that updates the variables in our code, it is possible to do a live parameter update while a program is running, removing the need for a tedious node restart. Learn how to do it in this post.
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/53e75e28/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn how to enable live parameter updates (C++) – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Starting the simulation
After having opened the rosject, let’s start a simulation. For that, let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Once inside the terminal, let’s run the commands below:
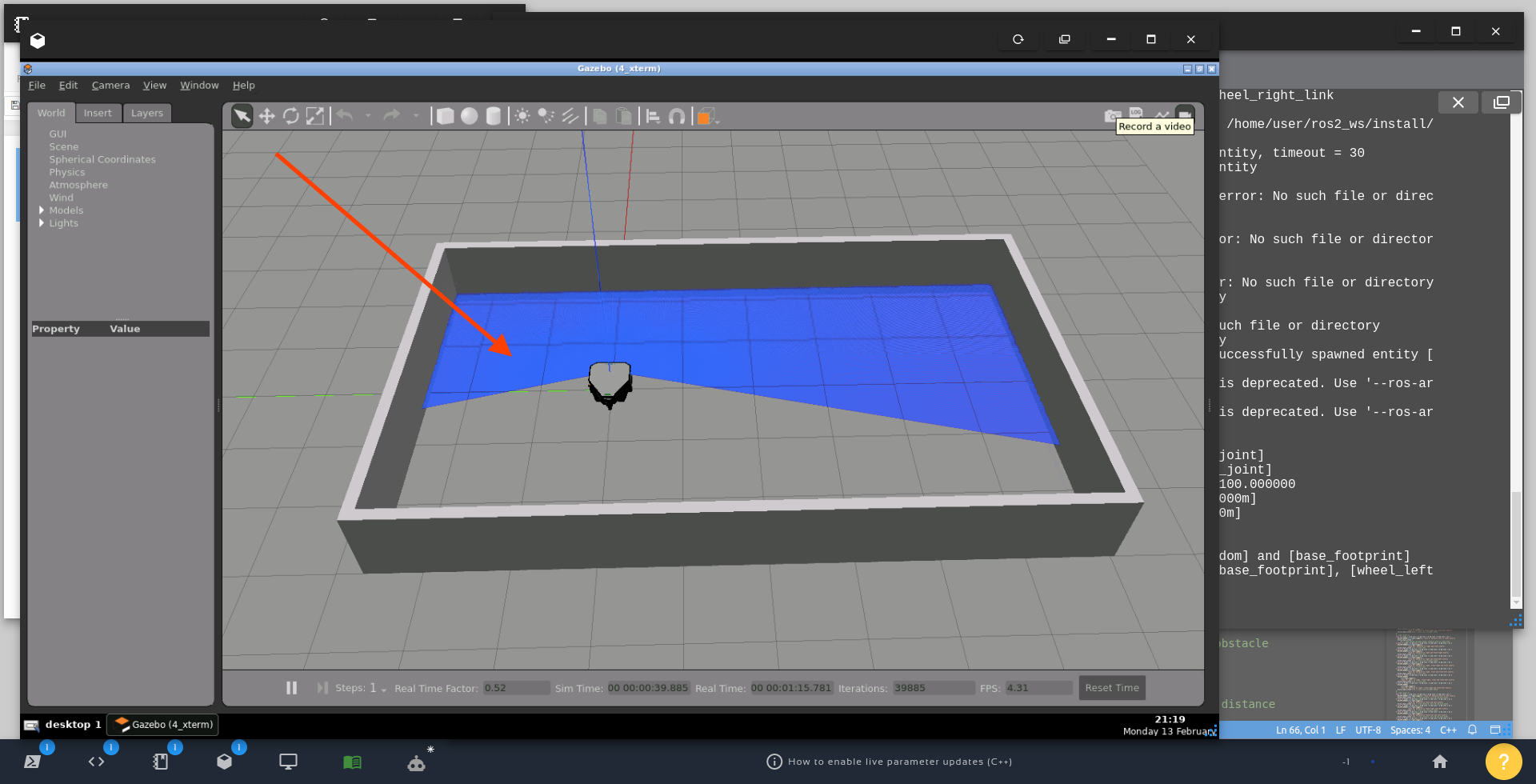
If everything went well, you should have a simulation loaded and opened automatically in a few seconds. The simulation will open from a top view, but you can use the mouse to move the simulation to a different perspective.
How to enable live parameter updates (C++)
Understanding the problem
Below is an example node in which we have only implemented the barebone basics of parameters in ROS2.
Let’s see it in action and see how it behaves, especially when we update its parameter values.
In a second terminal, let’s run the node for Obstacle Avoidance.
source ~/ros2_ws/install/setup.bash
ros2 run rule_based_obstacle_avoidance obstacle_avoidance
If you watch the simulation for a while, you will see that when the robot detects the wall, it rotates and moves forward until it detects another wall, and repeats the process.
The node name is obstacle_avoidance_node (you can check it in a third terminal by running: ros2 node list)
Now, let’s list the parameters of the node in a third terminal:
Now, still in the third terminal, let’s check the value of the safety_distance parameter:
ros2 param get /obstacle_avoidance_node safety_distance
The output we should have got should be the following:
Double value is: 1.5
Now, let’s set the parameter to a new value:
ros2 param set /obstacle_avoidance_node safety_distance 1.0
The expected output is:
Set parameter successful
Ok, so far so good. But with the new value, we expect the robot to get closer to the wall before turning around because now the safe distance was set from 1.5 meters to 1.0. The problem is that the robot is not considering the new value that we just set.
We can follow the same idea to try to make the robot move faster. Let’s check the current velocity of the robot:
ros2 param get /obstacle_avoidance_node linear_x_velocity
The output we should have got should be the following:
Double value is: 0.2
If we increase the speed:
ros2 param set /obstacle_avoidance_node linear_x_velocity 0.5
The expected output is:
Set parameter successful
The parameter was reported as successfully set, yet the robot does not move faster, because it still uses the value loaded when the node started.
In the current code, parameter values are fixed. As such, every time a parameter value changes, the parameter value in the code stays the same even though you may have expected it to update based on the latest value set.
In order to solve this, we must add a parameter callback function to your code so that the variable in the code gets the freshest data.
Before moving to the next section, please kill the simulation and all nodes running by pressing Ctrl+C on all terminals.
Solution: Add a parameter callback method
Alright, have you closed all programs by pressing CTRL+C on all terminals?
If you check around line 45 on that file, you will find the “private:” section, where we define the private variables of our class, something like the following:
Now, above that “private:” section, around line 38, let’s add the following code to instantiate a ParameterEventHandler, providing the current ROS node to use to create the required subscriptions:
Below the param_subscriber_ we have to set a callback method, in this case, a lambda function:
// Set a callback for this node's parameter, "linear_x_velocity"
auto callback_linear_x = [this](const rclcpp::Parameter &p) {
RCLCPP_INFO(this->get_logger(),
"callback_linear_x: Received an update to parameter \"%s\" "
"of type %s: \"%f\"",
p.get_name().c_str(), p.get_type_name().c_str(),
p.as_double());
linear_x_velocity_ = p.as_double();
};
Then we set “callback_linear_x” as the callback to invoke whenever linear_x_velocity is updated. We store the handle that is returned by “add_parameter_callback“; otherwise, the callback will not be properly registered.
Now that our package has been rebuilt and sourced, let’s launch the simulation again:
ros2 launch neo_simulation2 simulation.launch.py
The simulation should have been opened just like before, but now we will see the parameters affecting the simulation in “real-time”.
Before changing the parameters, let’s also launch the Obstacle Avoidance node, just like before, using the second terminal:
ros2 run rule_based_obstacle_avoidance obstacle_avoidance
You should see the robot approaching the wall, and turning around when getting close to it.
Changing the x velocity using ROS 2 Parameters
Ok, now that the robot is moving, let’s retrieve again the current value of the linear x velocity using the third terminal:
ros2 param get /obstacle_avoidance_node linear_x_velocity
Just like before, the expected output is:
Double value is: 0.2
Now let’s change that value:
ros2 param set /obstacle_avoidance_node linear_x_velocity 1.0
We expect a successful output:
Set parameter successful
If you look at the simulation now, you should see that when the robot is moving forward (not turning around), it moves really faster. So, as we can see, we are now able to make ROS2 Parameters be reflected “instantly”.
This opens up really many different possibilities.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, we will have a look at the ros2_persist_parameter_server package by the GitHub user fujitatomoya. With this package, you can have parameters saved to the disk. This way they are not lost when the machine is powered off or reset. The package we are going to use can be found at:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
You might already know that in ROS 2, all parameters are node-specific. A far less discussed aspect of parameters is their non-persistent nature. Non-persistent parameters are those parameters whose values are not saved to the disk. They are lost when the machine is powered off or reset.
In this post, we will have a look at the ros2_persist_parameter_server package aforementioned. We would like to thank Tomoya Fujita for making it Open Source.
Opening the rosject
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/51ef510a/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Get the ros2_persist_parameter_server package and compile it
After having opened the rosject, let’s close the ros2_persist_parameter_server package. For that, let’s open a terminal by clicking the Open a new terminal button.
Open a new Terminal
Once inside the terminal, let’s run the commands below:
Still in the first terminal, let’s run the parameter server, specifying where to save the parameters using the “-f” parameter:
ros2 run parameter_server server -f /home/user/ros2_ws/persistent_parameters.yaml
Now, let’s set a ROS2 parameter using the following command in a second terminal:
ros2 param set /parameter_server persistent.some_int 81
We should see the following output:
Set parameter successful
One thing worth noticing in the command above is the “persistent.” prefix in the some_int parameter. The parameters need that prefix in order to be saved automatically in the /home/user/ros2_ws/persistent_parameters.yaml file.
We can now set more parameters, which should also be successfully set:
ros2 param set /parameter_server persistent.a_string Konnichiwa
ros2 param set /parameter_server persistent.pi 3.14159265359
ros2 param set /parameter_server persistent.some_lists.some_integers 81,82,83,84
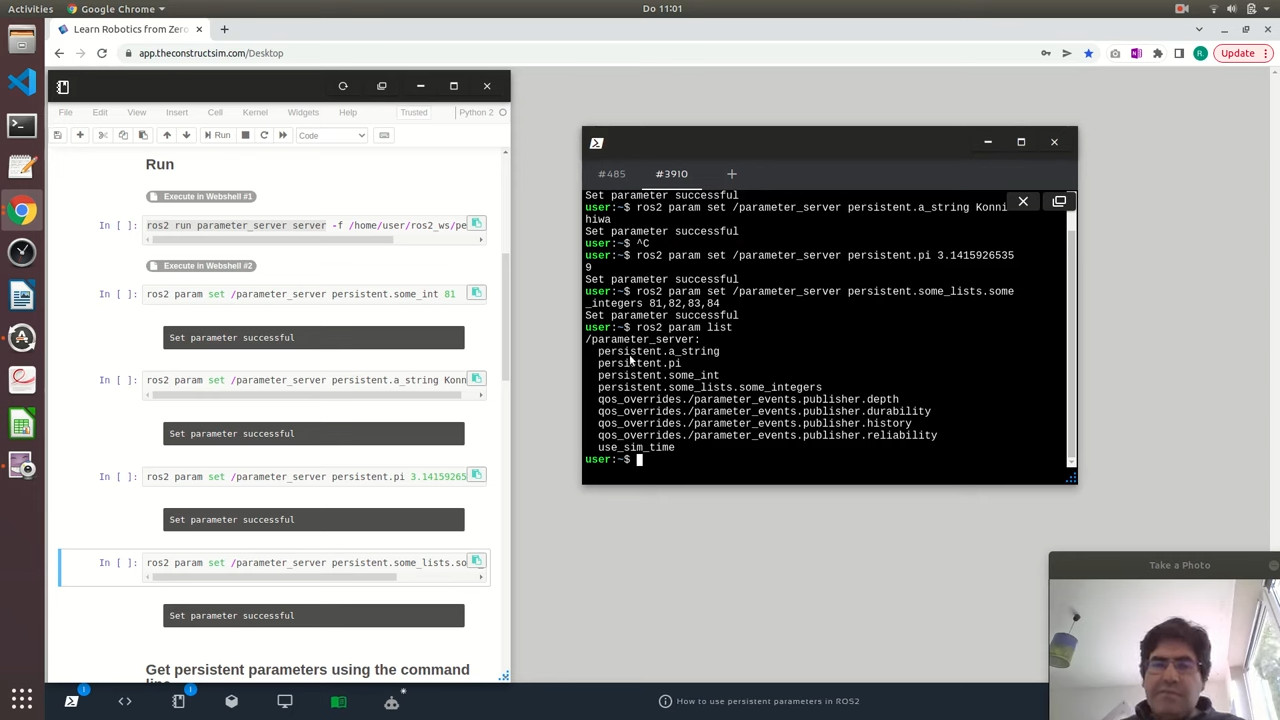
After the parameters are set, we can list them using the following command:
ros2 param list
How to use persistent parameters in ROS2
We can also retrieve the persistent.pi parameter, for example, just in case you want to be really sure that it is there:
ros2 param get /parameter_server persistent.pi
You can now kill the node running in the first terminal by pressing CTRL+C. You can also make sure there are no nodes running by running:
ros2 node list
Now, let’s start the node again to see that the parameters are loaded:
ros2 run parameter_server server -f /home/user/ros2_ws/persistent_parameters.yaml
And again, in another terminal you can list the parameters again, to confirm that the parameters from the previous “session” were successfully loaded:
ros2 param list
ros2 param get /parameter_server persistent.pi
Get those persistent parameters programmatically from another node
Alright. We have saved the parameters but they are related to a node that does nothing “nothing”. We need to be able to use those values in a ROS 2 node that really does some hard work.
In ROS 2, parameters are available via service interfaces. We could implement a service client ourselves and retrieve the parameters associated with any individual node. However, we could also use the rclpcpp library includes this functionality built in.
The rclcpp library implements the classes SyncParametersClient and AsyncParametersClient on which you can call functions like get_parameters that will handle the service calls to retrieve values about one or more parameters.
Let’s create another package called my_app_node using a third terminal (make sure you still have the server running in the first terminal):
You can now open the ~/ros2_ws/src/my_app_node/src/my_app_node.cpp file using the Code Editor to paste some content on it. You can open the Code Editor by clicking on the second link of the bottom bar:
Open the IDE – Code Editor
Once the Code Editor is open, you should be able to see the ros2_ws folder (ROS2 workspace) and navigate to the my_app_node.cpp file we just created.
After having the file open, let’s past the following content to it to read the value of the persistent.a_string variable:
#include "rclcpp/rclcpp.hpp"
class MyAppNode : public rclcpp::Node
{
public:
MyAppNode() : Node("my_app_node")
{
parameters_client =
std::make_shared(this, "/parameter_server");
parameters_client->wait_for_service();
auto parameters_future = parameters_client->get_parameters(
{"persistent.a_string"},
std::bind(&MyAppNode::callbackParamServer, this, std::placeholders::_1));
}
void callbackParamServer(std::shared_future<std::vector> future)
{
auto result = future.get();
auto param = result.at(0);
RCLCPP_INFO(this->get_logger(), "Got persistent parameter: %s", param.as_string().c_str());
}
private:
std::shared_ptr parameters_client;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared());
rclcpp::shutdown();
return 0;
}
You can now save the file by pressing CTRL+S.
Let us now open the CMakeLists.txt file found at ~/ros2_ws/src/my_app_node. Below the existing dependency find_package(ament_cmake REQUIRED), add the following lines:
We can now compile our package using the commands below:
cd ~/ros2_ws/
colcon build
source install/setup.bash
ros2 run my_app_node my_app_node
If everything went well, you should see the value of persistent.a_string printed.
Congratulations!!! You now know how to persist ROS 2 Parameters, and retrieve them programmatically using a ROS 2 Node.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, you will learn how to introspect ROS 2 executables by identifying publishers and subscribers in the executables. This answers this question posted on ROS Answers.
“Hey, do I have to install ros2 first?” Absolutely not! We will be using The Construct to get access to virtual machines pre-installed with ROS.
Click here to copy the ROS2 TurtleBot3 sandbox packages. Once copied, click the red RUN button to launch the packages in a virtual machine. Please be patient while the environment loads.
PS: You will need to login or create an account to copy the packages.
You might also want to try this on a local PC if you have ros2 and some executables installed. However, please note that we cannot support local PCs and you will have to fix any errors you run into on your own. The rest of the instruction assumes that you are working on The Construct; please adapt them to your local PC and ros2 installation.
Step 2: Explore the source code of an ament_python package
You can know what topics are being used by an executable (that is, introspect it) without running it by checking its source code, looking for publishers and subscribers.
Now head over to the Code Editor to make to explore the source code of the packages you just copied.
Open the Code Editor
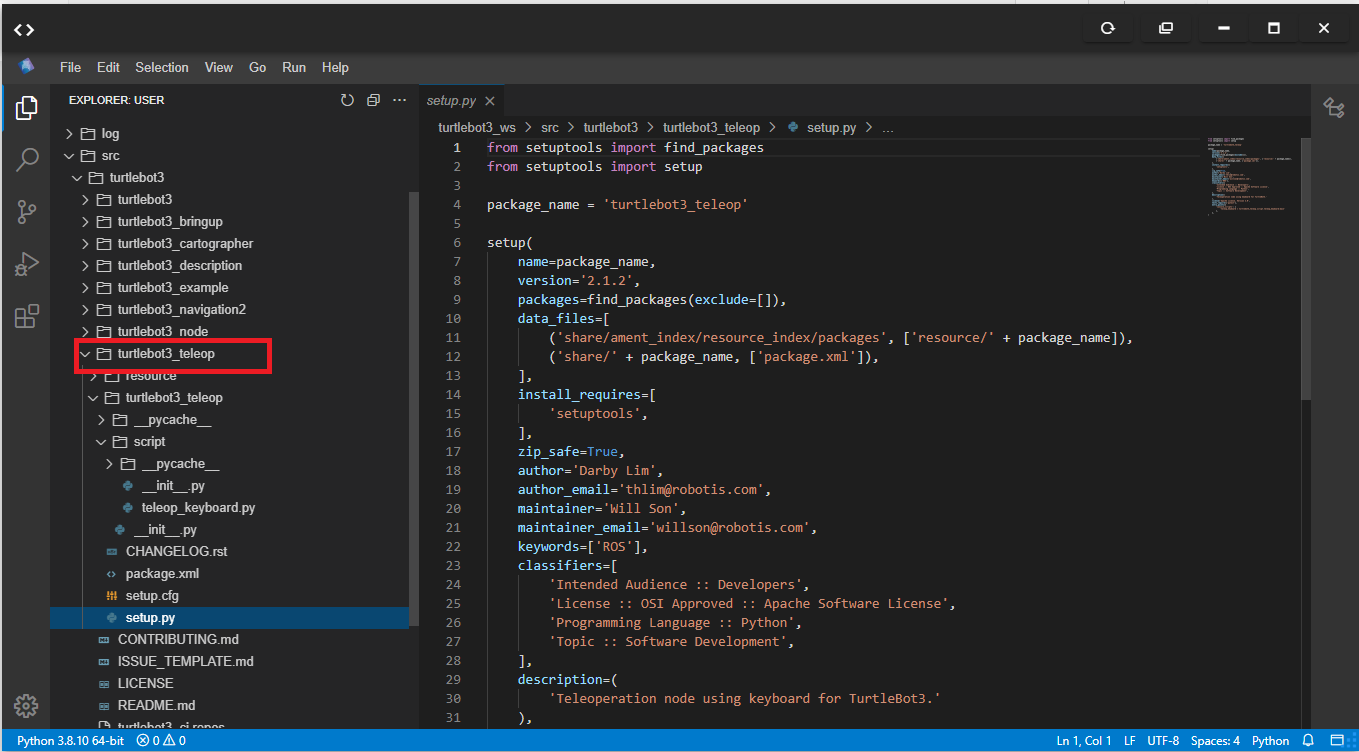
First, we look at the turtlebot3_teleop package.
turtlebot3_teleop package
Let’s look for the executable file for this package. We can find that in the setup.py file.
Looking at the entry_points part of the file, and then the console_scripts, we find the executable file is in the turtlebot3_teleop/script/teleop_keyboard.py file. Let’s find the publishers and/subscribers for this executable.
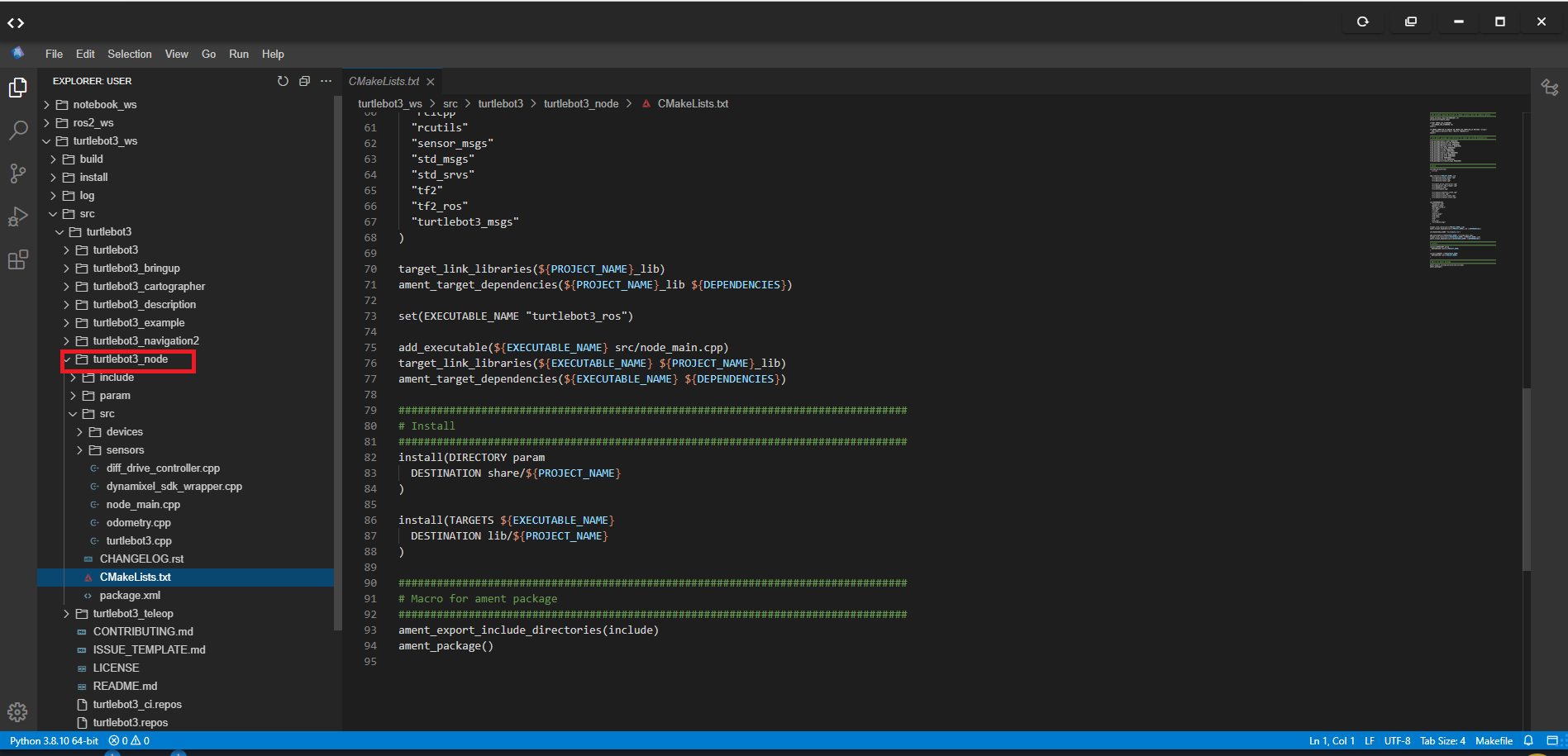
So we see that the main executable is src/node_main.cpp. Let’s examine it.
turtlebot3_node/src/node_main.cpp
// Copyright 2019 ROBOTIS CO., LTD.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
// Author: Darby Lim
#include <rcutils/cmdline_parser.h>
#include <rclcpp/rclcpp.hpp>
#include <chrono>
#include <memory>
#include <string>
#include "turtlebot3_node/diff_drive_controller.hpp"
#include "turtlebot3_node/turtlebot3.hpp"
void help_print()
{
printf("For turtlebot3 node : \n");
printf("turtlebot3_node [-i usb_port] [-h]\n");
printf("options:\n");
printf("-h : Print this help function.\n");
printf("-i usb_port: Connected USB port with OpenCR.");
}
int main(int argc, char * argv[])
{
setvbuf(stdout, NULL, _IONBF, BUFSIZ);
if (rcutils_cli_option_exist(argv, argv + argc, "-h")) {
help_print();
return 0;
}
rclcpp::init(argc, argv);
std::string usb_port = "/dev/ttyACM0";
char * cli_options;
cli_options = rcutils_cli_get_option(argv, argv + argc, "-i");
if (nullptr != cli_options) {
usb_port = std::string(cli_options);
}
rclcpp::executors::SingleThreadedExecutor executor;
auto turtlebot3 = std::make_shared<robotis::turtlebot3::TurtleBot3>(usb_port);
auto diff_drive_controller =
std::make_shared<robotis::turtlebot3::DiffDriveController>(
turtlebot3->get_wheels()->separation,
turtlebot3->get_wheels()->radius);
executor.add_node(turtlebot3);
executor.add_node(diff_drive_controller);
executor.spin();
rclcpp::shutdown();
return 0;
}
There’s no reference to a publisher or subscriber in this file, but it references some other files. Let’s look at the turtlebot3_node/turtlebot3.cpp file referenced on line 25.
Success! We see the /cmd_vel is also referenced on line 313. Can you find other files linked to the main file and it’s linked files, where other topics are referenced?
Step 4: Check your learning
Do you understand how to introspect ROS 2 executables? If you don’t know it yet, please go over the post again, more carefully this time.
(Extra) Step 5: Watch the video to understand how to introspect ROS 2 executables
Here you go:
Feedback
Did you like this post? Do you have any questions about how to introspect ROS 2 executables? Please leave a comment in the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS2 topics, please let us know in the comments area and we will do a video or post about it.
ROS2, the improved version of ROS (ROS1), is quickly becoming the standard for developing robotics applications.
In this post, we will take a look at how to build a local Debian package out of a ROS 2 package that you have in your system. Private Debian packages (*.deb files) are easy to share, install, upgrade and uninstall without you having to share any source code.
You can easily install them with sudo dpkg -i pkg-name.deb, for example.
It is highly recommended that you follow the previous posts of this series:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/5142d6f5/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Let’s start by compiling the ros2_draw_squares package that is inside the ~/ros2_ws/src folder. In order to do that, we need a terminal. You can open one by clicking the Open a new terminal button.
Open a new Terminal
Once the terminal is open, we can compile the package using the following commands:
cd ~/ros2_ws
colcon build
source install/setup.bash
Starting the simulation
Before showing the process of creating the Debian file, let’s see it in action first through a robot simulation.
Let’s start by exporting the GAZEBO_MODEL_PATH variable to the location of the turtlebot3 model files, so that the Gazebo Simulator can show the robot properly:
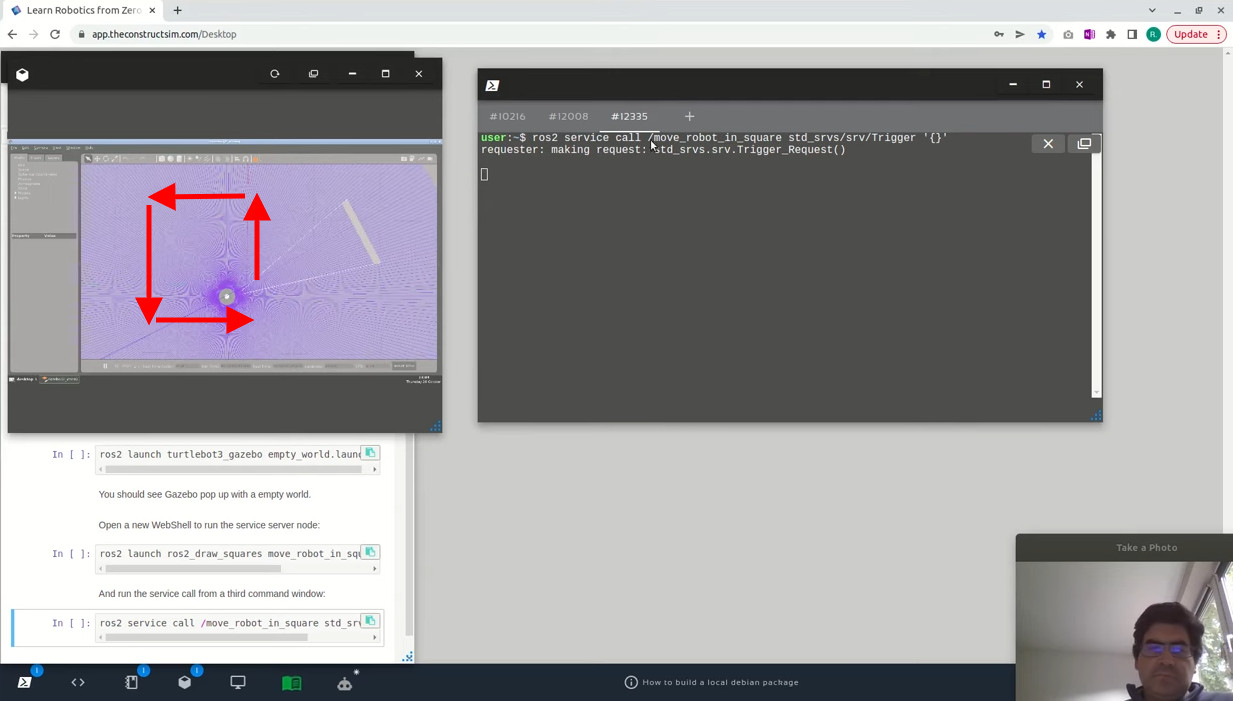
And from a third terminal, we can run the service move_robot_in_square.
ros2 service call /move_robot_in_square std_srvs/srv/Trigger '{}'
If everything went ok, in the simulation window you should have seen the Turtlebot robot moving in a square-like format.
Turblebot robot moving in a square-like format
Alright, we already saw the package in action. Now let us see the process of converting it into a Debian file.
Feel free to kill the existing simulation by pressing CTRL+C in the three terminals.
What is a Debian package and what is it used for?
A .deb file in essence it’s a very simple and easy way of distributing software in Debian-based Linux distributions. You can think of it as a file similar to a .tar file which is a format used to store multiple files in one single file. Using a Debian package we can install a ROS2 package in our environment without having to have the source files.
So for instance the example project contains the following files and directories:
The Debian file will consist of only one single file.
Deb files also hold metadata about the software they provide. By the use of metadata, Debian packaging handles the installation, removal, and dependencies of packages.
In the context of robotics, Debian files provide a convenient way to deploy and remotely manage robotic software on real robots. This includes installing, updating, and removing packages through an SSH (Secure Shell) connection, for example.
Get the building dependencies
After having stopped everything by pressing CTRL+C in the three terminals, the next thing we need to do is to actually install the building tools needed by running the following commands in the first terminal:
This will install the tools python3-bloompython3-rosdep, fakeroot, and dh-make packages.
Since this can take a while to install, you just have to wait a bit for it to finish.
Check the ROS2 package dependencies
All of the dependencies of the package should be properly declared in the package.xml file of the ROS 2 package.
Still in the first terminal, let’s see the dependencies that we have for our package:
cat ~/ros2_ws/src/ros2_draw_squares/package.xml
We just have to make sure all package dependencies are listed using the correct dependency tag. If when creating your own package you are not sure what kind of dependency a package is, you can use <depend> tag to specify that the dependency is a build, export, and execution one.
Initialize rosdep
Let’s initialize rosdep. That can still be done in the first terminal:
sudo rosdep init
You might see the following error if rosdep has already been initialized in the past:
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
Don't worry. This error message can be ignored since it has no effect whatsoever.
Create a Debian installable package
In order to creat the Debian package, let's start by moving to your package root directory, which is the directory that contains the package.xml file (using the first terminal):
cd ~/ros2_ws/src/ros2_draw_squares
After that, let’s use the bloom-generate command:
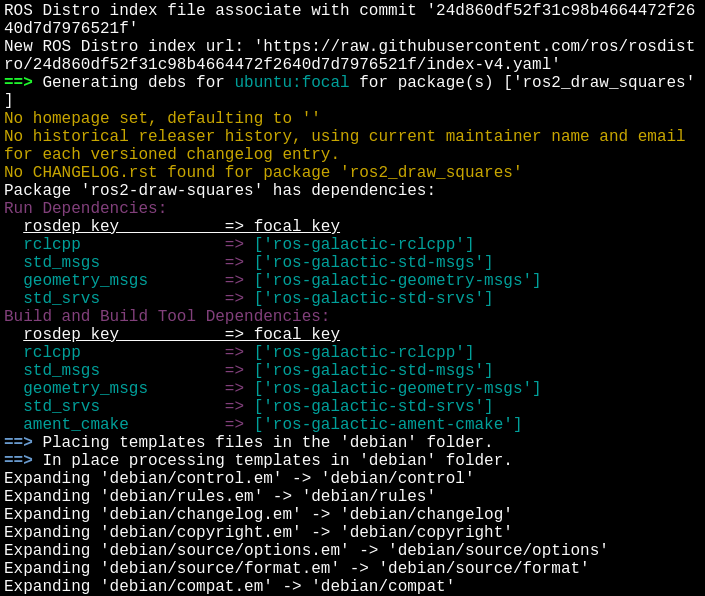
bloom-generate rosdebian
The expected output is something similar to the following:
bloom-generate rosdebian output
If for whatever reason you get an error message like the one below:
Could not resolve rosdep key
This means that rosdep could not find that particular package dependency. Verify if the package must be indexed in the rosdistro by creating a PR.
After successfully running the above command, you should get a directory named debian in the current directory, which contains the compiled files and rules required to create the Debian file. The “ls” command output should be like this:
CMakeLists.txt README.md debian include launch package.xml src
Use the following command to create a Debian package:
fakeroot debian/rules binary
We should see something similar to the following animation:
fakeroot expected output
After a while, the command should finish with no errors.
The command we just executed should have created a .deb file in the directory that is one level above. We can check it with:
cd ..
ls
Which should show us the following:
Debian file created
Install a ROS2 package from a local Debian installable file
Alright, our Debian file has been successfully generated.
Let us install this Debian package on our own machine by using the package management program called dpkg:
This will install the Debian package (including unpacking and configuring) onto the file system of the hard disk.
dpkg install output
After having installed the Debian package, it is ready to be used in our environment. Let’s find out where the package got installed. To do so we first need to get the package name:
Once we have the name, we can display where the files in the deb package got installed to:
dpkg -L ros-galactic-ros2-draw-squares
We can see that this package is now installed in the same location where the main ROS 2 installation is located.
Finally, in case you want to uninstall this package, we can easily do it also with dpkg:
sudo dpkg -P ros-galactic-ros2-draw-squares
And if you want to take it further from here, you can even create your own apt repository to host your private ROS2 .deb packages, but that’s a story for another time.
Congratulations on reaching the end of this tutorial. We hope this post was really helpful to you.
If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Before anything else, in case you want to use the logo above on your own robot or computer, feel free to download it for free and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we already prepared a rosject with a simulation for that: https://app.theconstructsim.com/l/50fbfe47/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 Topics vs Service vs Action – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Opening the Code Editor
Now that the rosject is open, let’s open the Code Editor by clicking on the second link:
Open the IDE – Code Editor
Once the Code Editor is open, you should be able to see that we have a ros2_ws folder (ROS2 workspace)
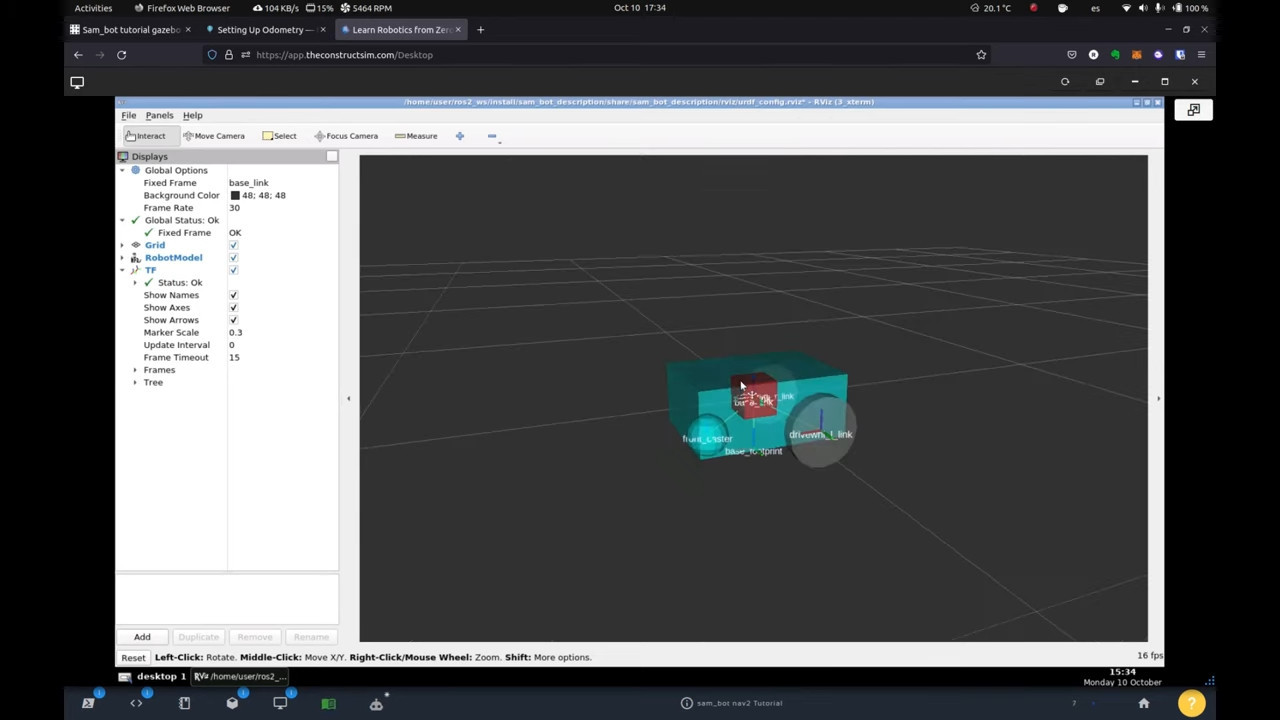
The sam_bot_description.urdf file
Now that you have the Code Editor open, let’s have a look at the file that contains the robot description. The file is inside the ros2_ws folder. The full path is:
As we saw in the overview, the question asked in ROS Answers was saying that the robot wheels were not working. That happened probably because the person forgot to add something to the URDF file.
Now, go to the terminal you have open and run the following command to run the simulation:
ros2 launch sam_bot_description display.launch.py
If everything went well, you should have Gazebo as well as RViz open, like in the image below (If the Graphical Tools don’t open automatically, just click click the 4th and 5th buttons on the bottom left bar to Open Gazebo and Open the Graphical Tools):
You can also see the Gazebo simulation by clicking the 4th icon named Open Gazebo. There you will see that the wheels are in place.
Well, that is pretty much it.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:










![[ROS2 Q&A] How to spawn robot from sam_bot nav2 tutorial #237](https://www.theconstruct.ai/wp-content/uploads/2022/11/How-to-spawn-robot-from-sam_bot-nav2-tutorial.jpeg)