In order to better understand ROS2 Interfaces, we need to have ROS2 installed in our system, and sometimes it is also useful to have some simulations. To make your life easier, we already prepared a rosject that you can use, with ROS2 already installed: https://app.theconstructsim.com/#/l/4a5c5215/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Learn ROS2 – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Let’s now head to the next section to really get some real practice.
ROS2 Interfaces overview
ROS2 Interfaces is a common language behind ROS2 messages, services, and actions.
Let’s start listing the interfaces. For that, let’s first open a terminal:
Open a new Terminal
After the terminal is open, you can list the interfaces with the command ros2 interface list. The output would be something similar to the following:
As you can see in the output above, the same command returned Messages, Actions, and Services.
Creating our first ROS2 Interface (a message)
If you are using the rosject provided at the beginning of this post, there is already a ROS2 Package called checking_interfaces on the /home/user/ros2_ws/src/checking_interfaces path. The package also already contains a message on the ~/ros2_ws/src/checking_interfaces/msg/NewMsg.msg path.
If you are not using the provided rosject, you can create a package with:
If you are using the rosject you do not need to create the message msg/NewMsg.msg, but for learning purposes, let’s see how to create it.
~/ros2_ws/src/checking_interfaces$ ls ~/ros2_ws/src/checking_interfaces$ ls msg/NewMsg.msg
cd ~/ros2_ws/src/checking_interfaces
mkdir msg
cd msg
touch NewMsg.msg
Then, paste the following content on the NewMsg.msg file:
bool check
int16 number
string text
If you are wondering how to know which types are accepted for the properties of the new message, the types available are:
ROS2 build-in-types
Type name
C++
Python
DDS type
bool
bool
builtins.bool
boolean
byte
uint8_t
builtins.bytes*
octet
char
char
builtins.str*
char
float32
float
builtins.float*
float
float64
double
builtins.float*
double
int8
int8_t
builtins.int*
octet
uint8
uint8_t
builtins.int*
octet
int16
int16_t
builtins.int*
short
uint16
uint16_t
builtins.int*
unsigned short
int32
int32_t
builtins.int*
long
uint32
uint32_t
builtins.int*
unsigned long
int64
int64_t
builtins.int*
long long
uint64
uint64_t
builtins.int*
unsigned long long
string
std::string
builtins.str
string
wstring
std::u16string
builtins.str
string
Compiling our ROS2 Interface
In order to compile our ROS2 Interface, we have to touch the ~/ros2_ws/src/checking_interfaces/CMakeLists.txt file. Again, if you are using the rosject we provided, everything is already prepared for you. For learning purposes, let’s open the file to modify it. Let’s start by opening the Code Editor:
Open the IDE – Code Editor
After the Code Editor is open, feel free to open the checking_interfaces/CMakeListst.txt file.
Around line 13 of the CMakeListst.txt file, we have to add the following lines:
The first line mentioned above includes the rosidl_default_generators package, which will be used to “compile” our message to make it available for Python and C++, so that our nodes can use the interface.
In the rosidl_generate_interfaces we add the name of the interface (message, service, or action) that we want to compile, which in this case is “msg/NewMsg.msg”.
After setting up the CMakeLists.txt file, you also have to set up the checking_interfaces/package.xml file. We have to add rosidl_default_generators as a build dependency, we also need to add the rosidl_default_runtime execution dependency, and we also need the rosidl_interface_packages “member of group”. In the end, the lines you would need to add are:
After saving the files, you can compile the interface with:
cd ~/ros2_ws/
colcon build --packages-select checking_interfaces
The package should compile with no errors:
...
This may be promoted to an error in a future release of colcon-core.
Starting >>> checking_interfaces
Finished <<< checking_interfaces [5.27s]
Summary: 1 package finished [5.87s]
After the package is compiled, we can now source the installation folder so that ROS can find what we have compiled so far:
source install/setup.bash
If we now list the interfaces again and search for our NewMsg, we should be able to find it:
ros2 interface list | grep New
# ...
checking_interfaces/msg/NewMsg
# ...
As we can see in the output above, we have a message called NewMsg.
Using the interface we just created
If we have just created the checking_interfaces/msg/NewMsg, we should be able to use it. We can check its definition with:
ros2 interface show checking_interfaces/msg/NewMsg
which shows the exact thing we defined in the NewMsg.msg file:
bool check
int16 number
string text
Let’s now create a publisher in a topic called /testing using this message:
Similar to when defining our message, we already have a service defined on ~/ros2_ws/src/checking_interfaces/srv/NewServiceMessage.srv, but we will be following the process for learning purposes in case you are not using the rosject we provided, or wants to learn with hands-on.
cd ~/ros2_ws/src/checking_interfaces
mkdir srv
cd srv
touch NewServiceMessage.srv
You can now open the NewServiceMessage.srv file with the Code Editor and paste the following content on it:
bool check
---
int16 number
string text
In order to compile the service interface, you have to open the CMakeLists.txt file again and add “srv/NewServiceMessage.srv” right after “msg/NewMsg.msg” that we added earlier around line 15 of our CMakeLists.txt file. The rosidl_generate_interfaces section of the file would be like:
As you can see so far, the same rosidl_generate_interfaces is used to compile Messages and Services.
You may have noticed that we have a line containing “—“ in the NewServiceMessage.srv file. These three “—” basically separate the Service Request from the Service Response.
The request will be “bool check“, and the fields used in a response will be “int16 number” and “string text“.
After saving the file changes, we can just compile the service interface in the same way that we compiled the message interface:
cd ~/ros2_ws/
colcon build --packages-select checking_interfaces
source install/setup.bash
If you now list the interfaces, you should be able to easily find our NewServiceMessage.
ros2 interface list | grep New
checking_interfaces/msg/NewMsg
checking_interfaces/srv/NewServiceMessage
Congratulations. You now know how to easily create ROS2 Interfaces. Please go ahead and try to create ROS2 Action Interfaces yourself, or you can also check the courses that we have listed at the end of this post.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
In this post, we will see how to get an RGB camera working in ROS2 and RVIZ2. You might already be used to doing this in ROS1 and RVIZ1, and it’s easy-peasy. In ROS2 however, it’s a bit tricky and you are about to learn how to break the codes.
Step 1: Grab a copy of the ROS Project containing the code
Click here to get your own copy of the project (PS: If you don’t have an account on the ROS Development Studio, you would need to create one. Once you create an account or log in, we will copy the project to your workspace).
That done, open the project using the Run button. This might take a few moments, please be patient.
You should now see a notebook with detailed instructions. This post includes a summary of these instructions and some other tips.
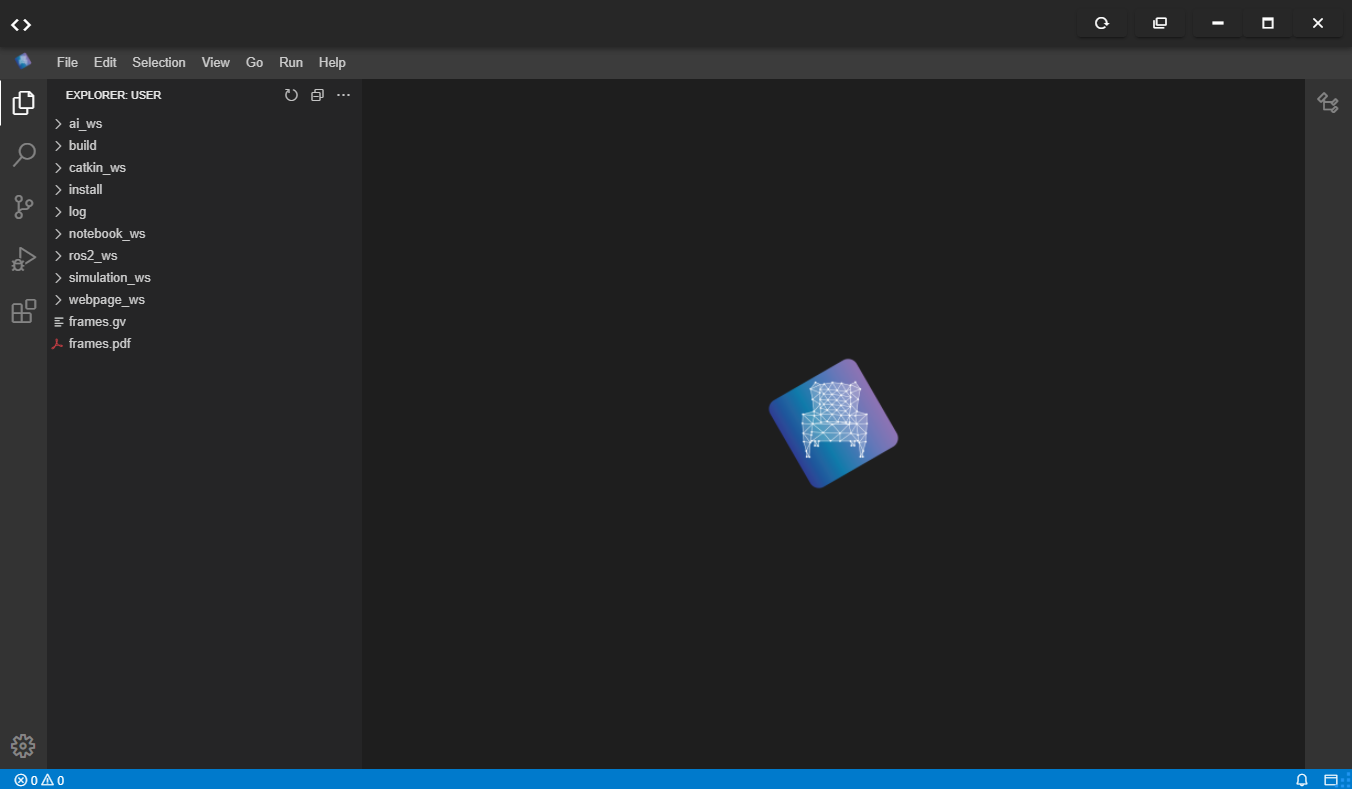
Step 2: Explore the source code using the IDE
Open the IDE by clicking on the icon as shown above. You should now see something similar to the image below:
All the files used in the simulation are in the ros2_ws/src directory. Explore the files. Double-click to open a file in the editor. You will refer back to some of the files later on.
Step 3: Study the main files needed to get an RGB camera working in ROS2 and RVIZ2
There are two main things you need to do to get this working:
Add the camera to the URDF file (and launch the URDF file) so we can have the camera in Gazebo
Create a robot state publisher node for the robot so we can visualize it in Rviz2
Let’s see these steps in details.
All the code for the simulation is in ros2_ws/src/box_bot/. Let’s examine the main files related to launching the camera, so you can understand how to implement yours.
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import os from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.conditions import IfCondition
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
pkg_box_bot_gazebo = get_package_share_directory('box_bot_gazebo')
pkg_box_bot_description = get_package_share_directory('box_bot_description')
# Start World
start_world = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_box_bot_gazebo, 'launch', 'start_world_launch.py'),
)
)
# Spawn the robot
spawn_robot_world = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_box_bot_description, 'launch', 'spawn_robot_launch_v3.launch.py'),
)
)
return LaunchDescription([
start_world,
spawn_robot_world
])
The launch file above does two things:
Spawns the world, by calling the launch file that spawns the world.
Spawns the robot, by calling the launch file that spawn the robot. This is where our interest lies. Let’s see how this is done, in the launch file ros2_ws/src/box_bot/box_bot_description/launch/spawn_robot_launch_v3.launch.py.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='true')
# Get the path to the URDF file
urdf = os.path.join(get_package_share_directory('box_bot_description'), 'robot/', 'box_bot.urdf')
assert os.path.exists(urdf), "Thebox_bot.urdf doesnt exist in "+str(urdf)
# Open the URDF file
with open(urdf, 'r') as infp:
robot_desc = infp.read()
return LaunchDescription([
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
Node(package='box_bot_description', executable='spawn_box_bot.py', arguments=[urdf], output='screen'),
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{'use_sim_time': use_sim_time, 'robot_description': robot_desc}],
arguments=[urdf]),
])
The launch file above does two things:
Creates a node that that spawns the box bot with the camera, taking the path to the URDF file as the argument. The node is implemented in the file spawn_bot_bot.py file. We’ll look at this file next.
Creates a node that publishes the robot state. It takes the URDF file string as a parameter. This will be used by Rviz2.
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import os
import sys
import rclpy
from gazebo_msgs.srv import SpawnEntity
def main(args=None):
rclpy.init(args=args)
node = rclpy.create_node('minimal_client')
cli = node.create_client(SpawnEntity, '/spawn_entity')
content = ""
if sys.argv[1] is not None:
with open(sys.argv[1], 'r') as content_file:
content = content_file.read()
req = SpawnEntity.Request()
req.name = "box_bot"
req.xml = content
req.robot_namespace = ""
req.reference_frame = "world"
while not cli.wait_for_service(timeout_sec=1.0):
node.get_logger().info('service not available, waiting again...')
future = cli.call_async(req)
rclpy.spin_until_future_complete(node, future)
if future.result() is not None:
node.get_logger().info(
'Result ' + str(future.result().success) + " " + future.result().status_message)
else:
node.get_logger().info('Service call failed %r' % (future.exception(),))
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
The file simply takes the URDF file passed to it and spawns the robot.
Now, let’s see the URDF file itself. The part that adds the camera is labelled Camera, somewhere in the middle of the file. Locate the file in the IDE:
Step 4: Launch the Simulation and Rviz2 to see the RGB camera
Open a web shell and run the following command:
user:~$ cd ~/ros2_wsuser:~/ros2_ws$ source install/setup.bash
user:~/ros2_ws$ ros2 launch box_bot_gazebo box_bot_launch.py
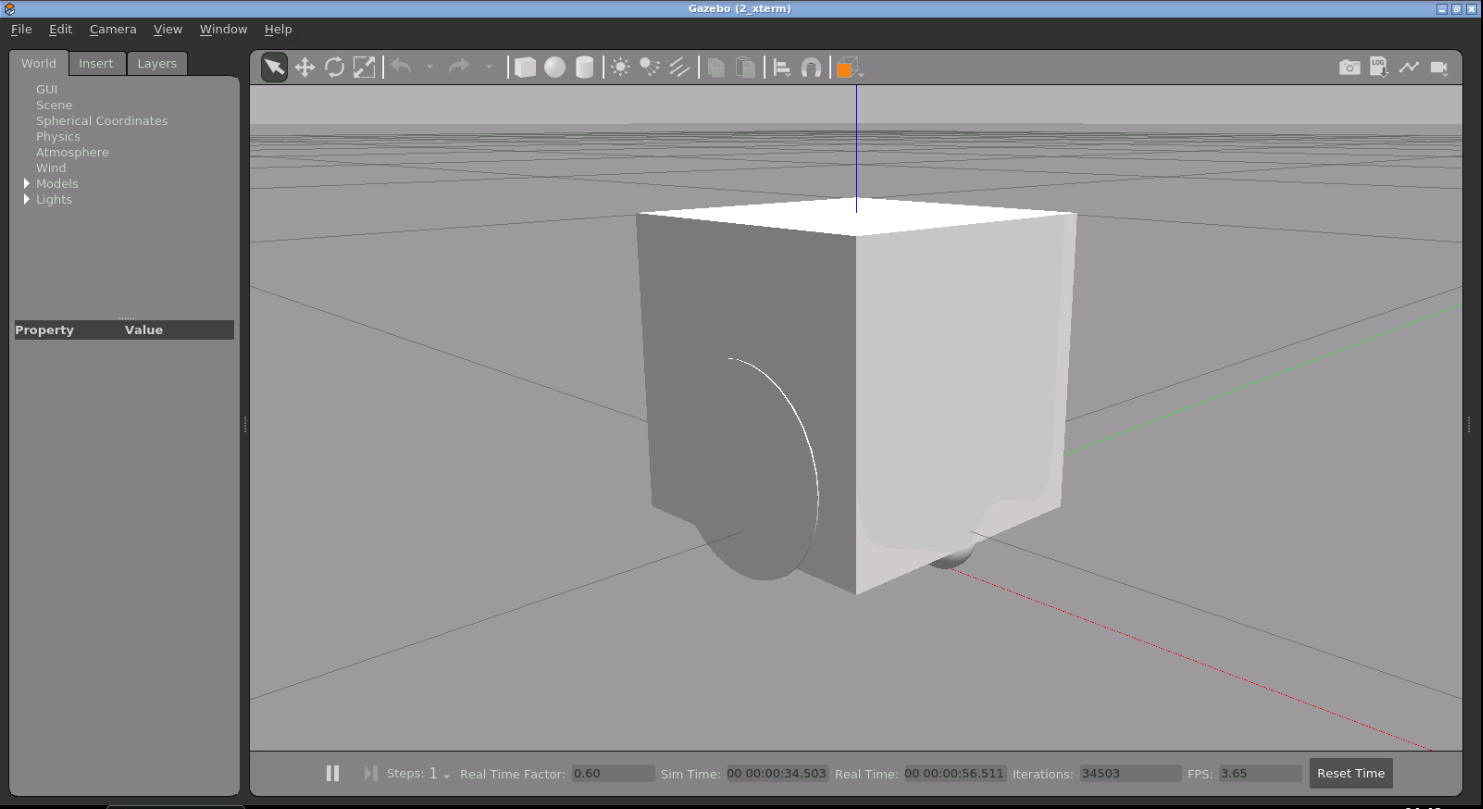
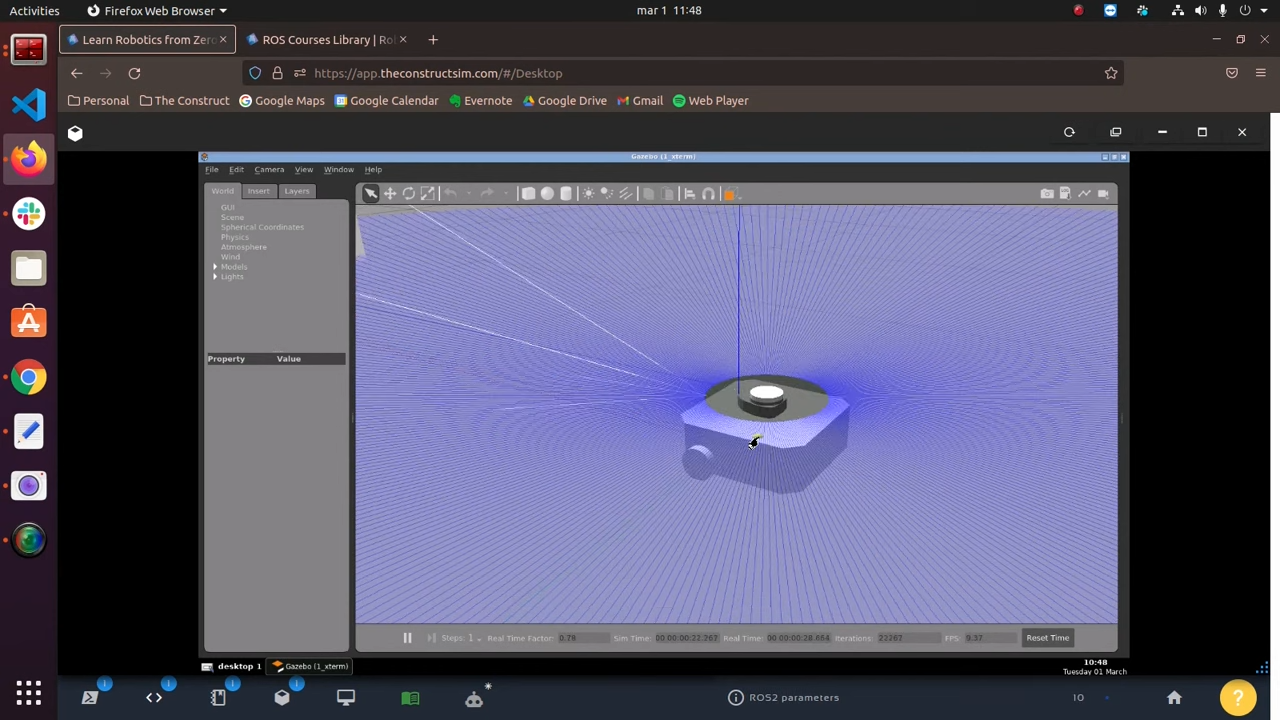
Open the Gazebo app (if it does not open automatically). You should see a simulation similar to this one:
Next, let’s launch Rviz2 to see the camera. In another web shell, type:
rviz2
Now open the graphical tools app (if it does not open automatically).
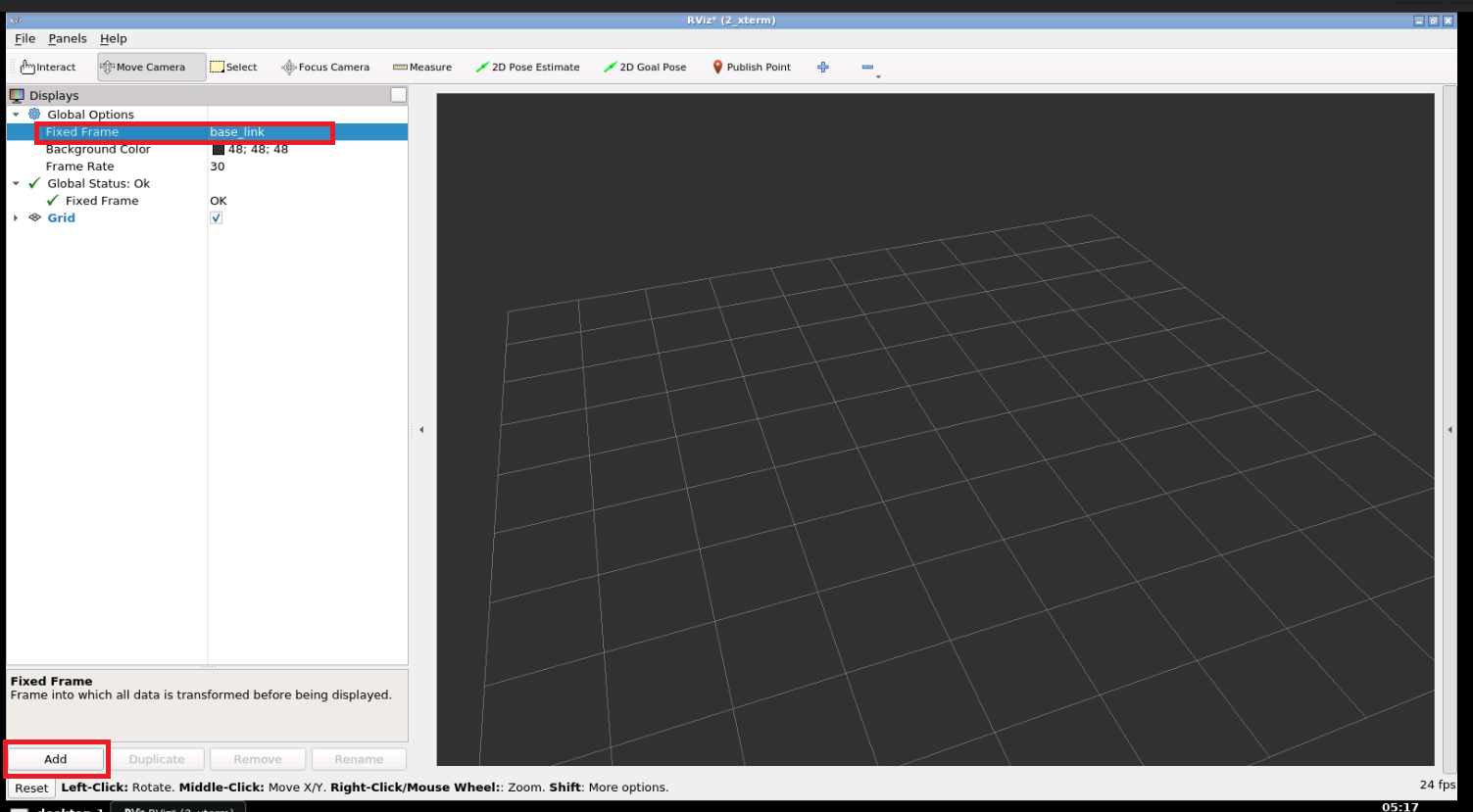
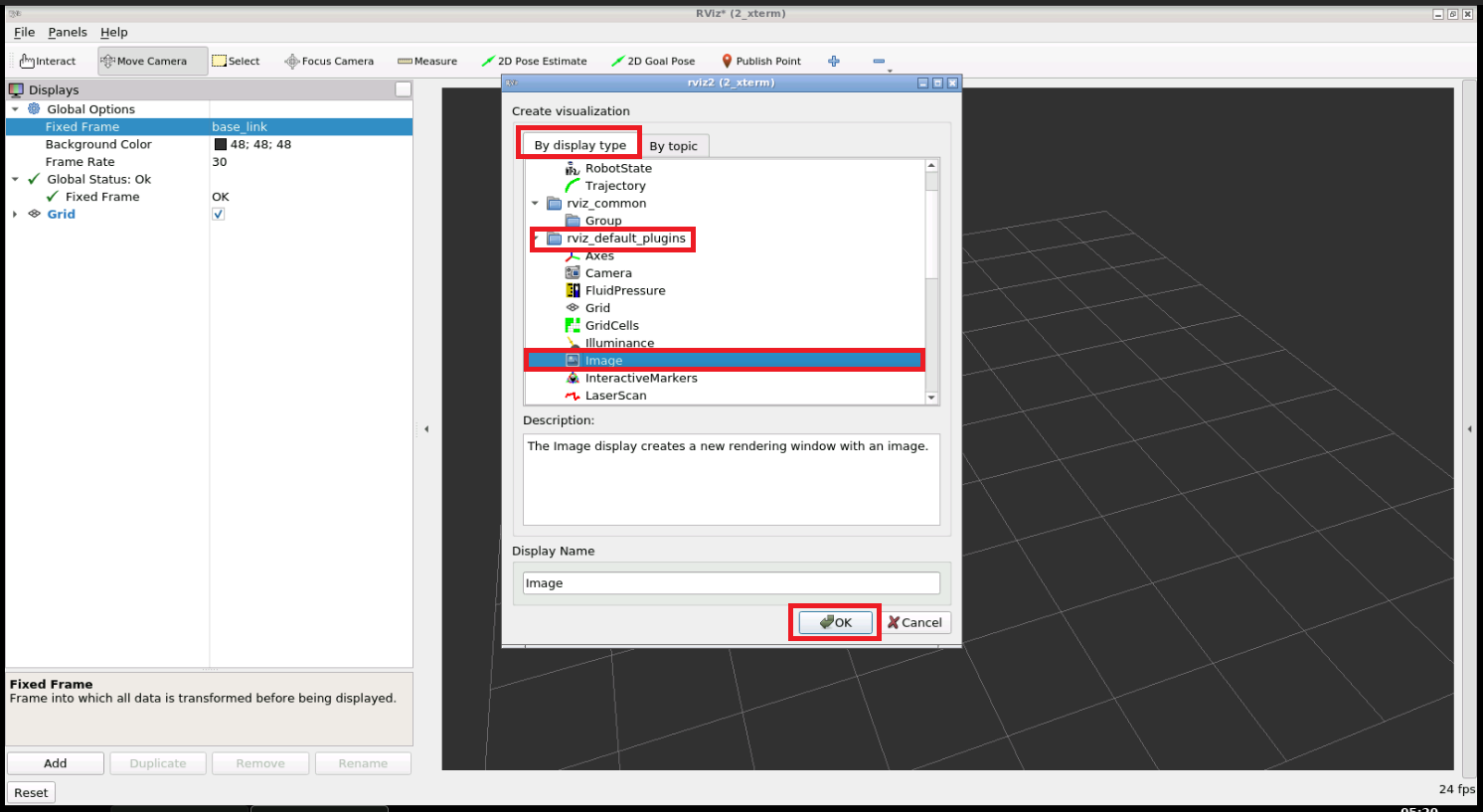
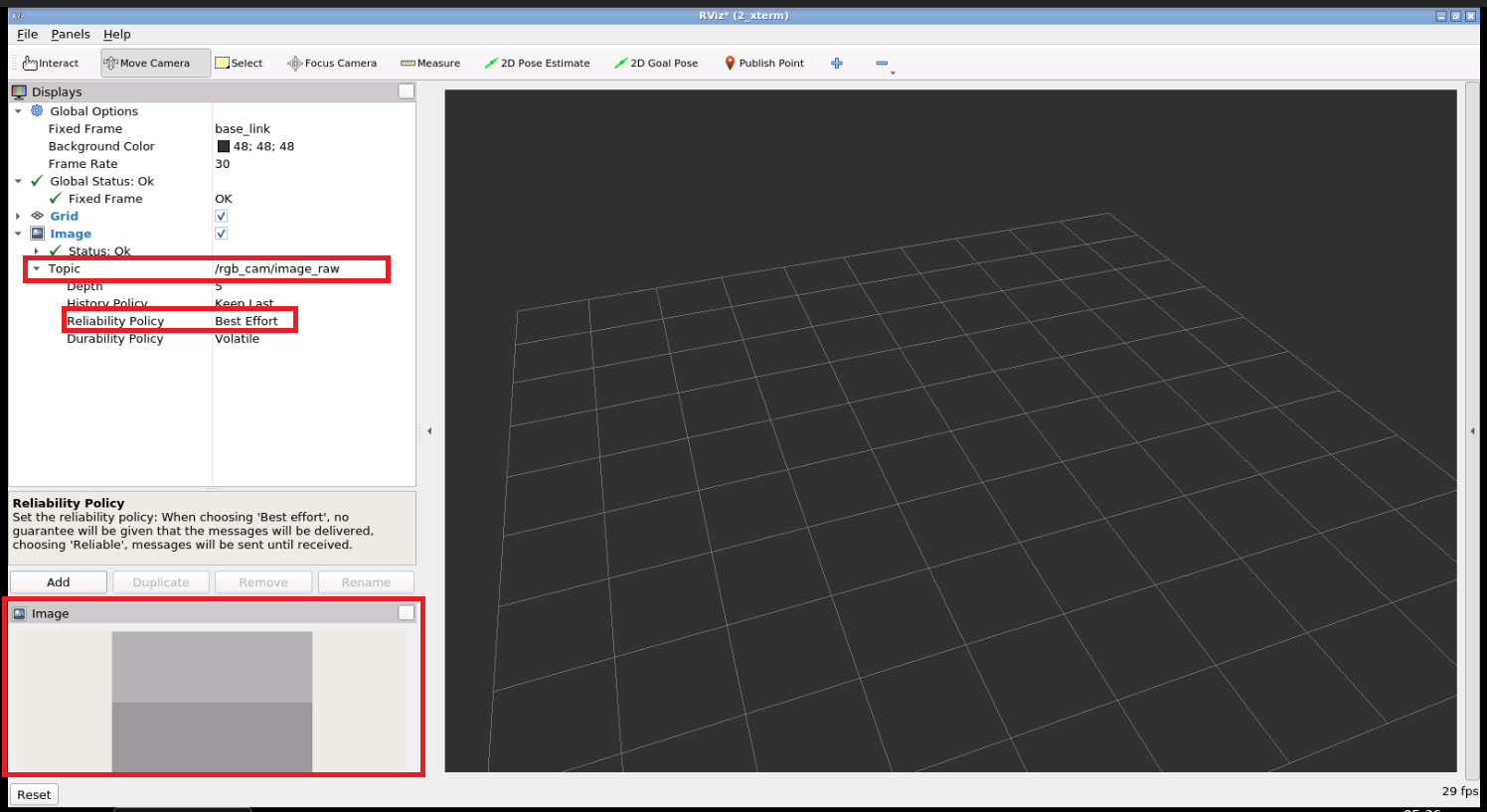
You should now see the Rviv2 window. Set the Fixed Frame to base_link and click Add to add an Image display.
Expand the Image display, then expand the Topic property. Select the /rgb_cam/image_raw topic and set the Reliability to Best Effort. There you go!
Step 5: Consolidate your learning
Do you understand how to get an RGB camera working in ROS2 and RVIZ2? Are you able to implement a camera in your own simulation? If not, please go over the post again and maybe watch the video below? Let us know what worked for you in the comments.
Extra Step: Watch the video to see the sights and sounds version how to get an RGB camera working in ROS2 and RVIZ2
Did you like this post? Do you have any questions about the explanations? Whatever the case, please leave a comment on the comments section below, so we can interact and learn from each other.
If you want to learn about other ROS2 topics, please let us know in the comments area and we will do a video or post about it.
As we can see on https://docs.ros.org/en/foxy/Concepts/About-Tf2.html, tf2 is the transform library for ROS2. It maintains the relationship between coordinate frames in a tree structure buffered in time and lets the user transform points between any two coordinate frames at any desired point in time.
Creating a rosject
In order to learn TF2 hands-on, we need to have a system with ROS installed. We are going to use The Construct (https://app.theconstructsim.com/) for this tutorial, but if you have ROS2 installed on your own computer, you should be able to do ~everything on your own computer, except this creating a rosject part.
Let’s start by opening The Construct (https://www.theconstruct.ai/) and logging in. You can easily create a free account if you still don’t have one.
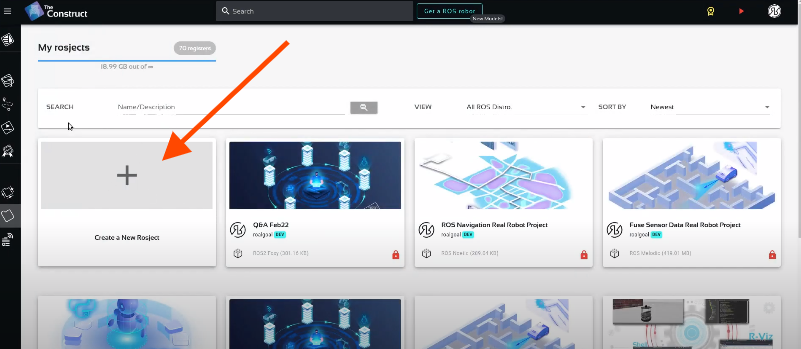
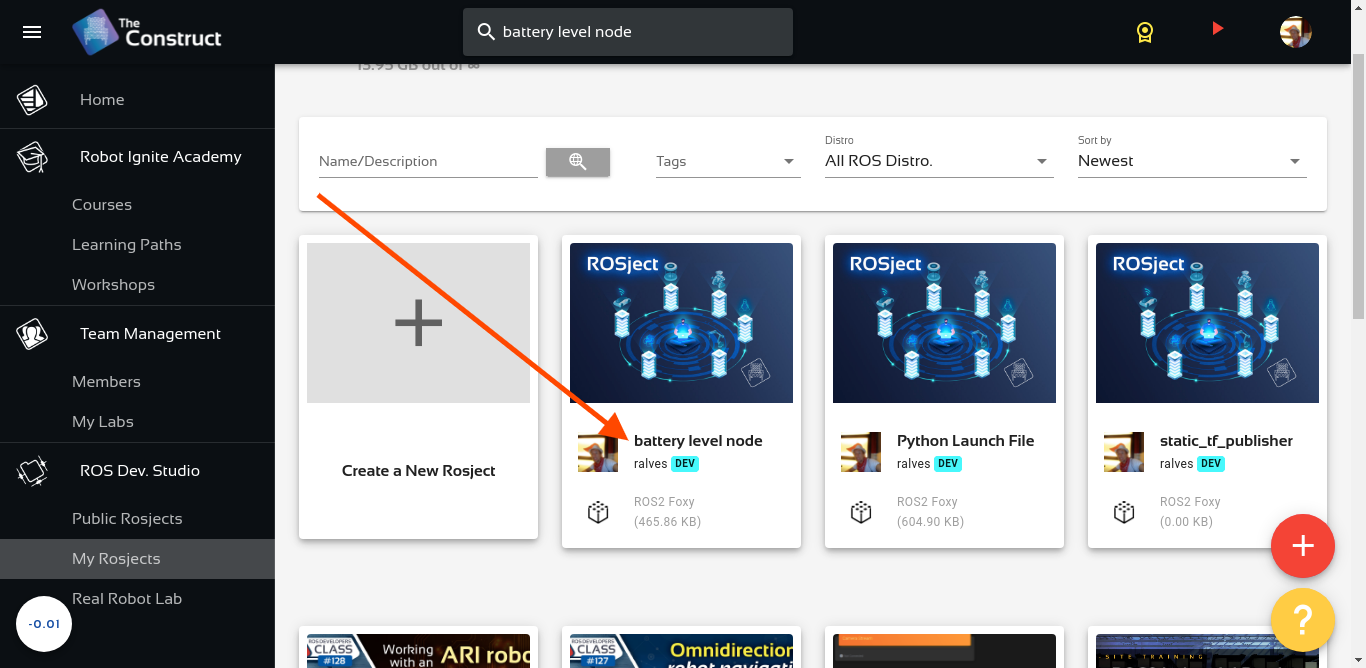
Once inside, if you did not decide to use the existing rosject, let’s click My Rosjects on the left side and then, Create a new rosject.
Create a new rosject
Let’s select ROS2 Foxyfor the ROS Distro of the rosject, let’s name the rosject as you want. You can leave the rosject public. You should see the rosject you just created in your rosjects list (the name is certainly different from the example below that was added just for learning purposes)
If you mouse over the recently created rosject, you should see a Run button. Just click that button to launch the rosject.
Creating a ROS2 Python package
After pressing the Run button, you should now have the rosject open. Now, it’s time to create a ROS2 Python package if you had to create your own rosject. If you used the rosject we shared at the beginning of this post, you don’t need to create the package. To create the package, let’s start by opening a terminal:
Open a new Terminal
Now, in this first terminal, let’s run the following command to create our package named tf2_examples:
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_python --node-name my_node tf2_examples
If everything went fine, the output should be as follows:
As we can see in the logs, we already have a node called ./tf2_examples/tf2_examples/my_node.py and a ./tf2_examples/setup.py.
Preparing our python package to have launch files
In order to be able to have launch files in our package, we need to modify the ~/ros2_ws/src/tf2_examples/setup.py file.
We have basically to import glob and modify the data_files variable. To make our life easier, I’m going to paste here the full content of the setup.py file after our modifications (bear in mind that if you used the rosject provided at the beginning, the file will already contain the correct code):
On The Construct, we do not always have all packages required for all purposes. For this TF2 demonstration, we need to have some packages. Lets install them by running the following commands in a second terminal:
If you have used the rosject we provided at the beginning, you already have the my_node.py with a Frame Publisher set.
If you created a rosject manually, however, you need to manually replace the content of my_node.py with the following content taken from the official ROS2 Tutorials:
from geometry_msgs.msg import TransformStamped
import rclpy
from rclpy.node import Node
from tf2_ros import TransformBroadcaster
import tf_transformations
from turtlesim.msg import Pose
class FramePublisher(Node):
def __init__(self):
super().__init__('turtle_tf2_frame_publisher')
# Declare and acquire `turtlename` parameter
self.declare_parameter('turtlename', 'turtle')
self.turtlename = self.get_parameter(
'turtlename').get_parameter_value().string_value
# Initialize the transform broadcaster
self.br = TransformBroadcaster(self)
# Subscribe to a turtle{1}{2}/pose topic and call handle_turtle_pose
# callback function on each message
self.subscription = self.create_subscription(
Pose,
f'/{self.turtlename}/pose',
self.handle_turtle_pose,
1)
def handle_turtle_pose(self, msg):
t = TransformStamped()
t2 = TransformStamped()
# Read message content and assign it to
# corresponding tf variables
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'world'
t.child_frame_id = self.turtlename
# turtle/drone
t2.header.stamp = self.get_clock().now().to_msg()
t2.header.frame_id = self.turtlename
t2.child_frame_id = 'drone'
# Turtle only exists in 2D, thus we get x and y translation
# coordinates from the message and set the z coordinate to 0
t.transform.translation.x = msg.x - (11.08888/2)
t.transform.translation.y = msg.y - (11.08888/2)
t.transform.translation.z = 0.0
t2.transform.translation.x = -0.5
t2.transform.translation.y = 0.0
t2.transform.translation.z = 1.0
# For the same reason, turtle can only rotate around one axis
# and this why we set rotation in x and y to 0 and obtain
# rotation in z axis from the message
q = tf_transformations.quaternion_from_euler(0, 0, msg.theta)
t.transform.rotation.x = q[0]
t.transform.rotation.y = q[1]
t.transform.rotation.z = q[2]
t.transform.rotation.w = q[3]
t2.transform.rotation.x = 0.0
t2.transform.rotation.y = 0.0
t2.transform.rotation.z = 0.0
t2.transform.rotation.w = 1.0
# Send the transformation
self.br.sendTransform(t)
self.br.sendTransform(t2)
def main():
rclpy.init()
node = FramePublisher()
try:
rclpy.spin(node)
except KeyboardInterrupt:
pass
rclpy.shutdown()
If you check carefully the code of my_node.py, you can see that around line 24 we start a TF Broadcaster:
# Initialize the transform broadcaster
self.br = TransformBroadcaster(self)
we then create a subscriber to a /turtle{1}{2}/pose topic and call handle_turtle_pose method when messages arrive on this topic. I highly recommend you have a look at the comments and the code of the handle_turtle_pose to better understand it. It not only makes you exercise your brain but also makes you better understand things by yourself.
Creating a launch file
Now that we have our code in place, we need a launch file. If you remember well, the setup.py file is already prepared for launch files. We now need to create the launch files. Bear in mind that if you are using the rosject we provided at the beginning of the post, this launch folder and its python file already exist.
Assuming you created a rosject manually, let’s create a launch folder using the terminal:
cd ~/ros2_ws/src/tf2_examples
mkdir launch
cd launch
touch tf2_example.launch.py
If you just created the tf2_example.launch.py file, it may be empty. If that is the case, just copy the following content to it:
If you are wondering why you need to compile the workspace if we are using only python, not C++, the answer is: we need to compile so that ROS2 can copy the launch files to the common share folder of the workspace.
Launching the turtle simulation using ros2 launch files
Now that our package is compiled and everything in place, let’s launch the launch file we just created:
cd ~/ros2_ws/
source install/setup.bash
ros2 launch tf2_examples tf2_example.launch.py
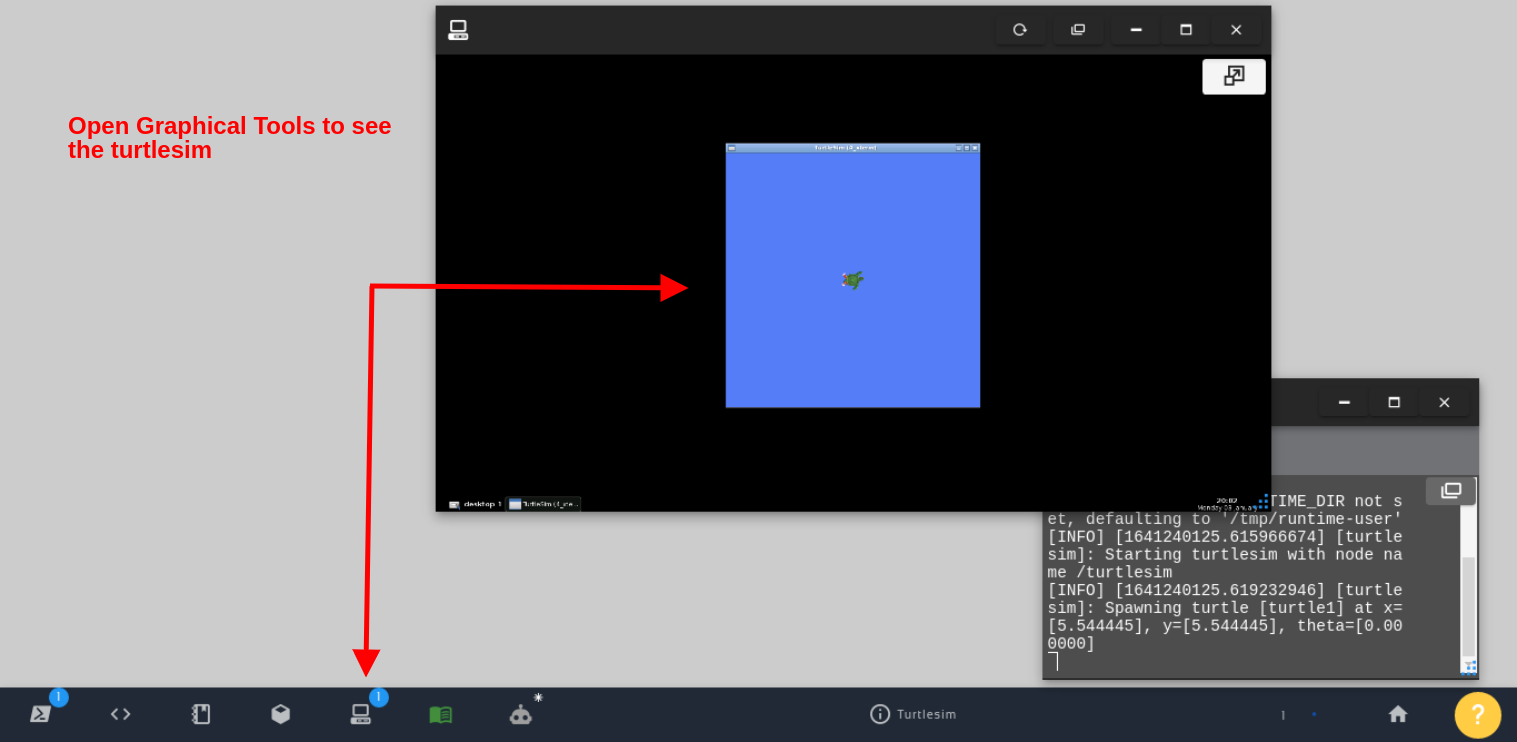
You should now have a simulation window that should have opened automatically with the turtlesim simulation on it.
If the simulation do not show automatically to you, you can just open the Graphical Tools:
Open Graphical Tools to see the turtlesim
If we now open a third terminal, we should be able to see our nodes there after typing ros2 node list:
ros2 node list
/broadcaster1
/sim
Open RViz2
Now that we have our simulation and our broadcaster running, we need RViz2 to see the frames.
Let’s open it running the following command in the third terminal:
ros2 run rviz2 rviz2
If rviz2 does not show automatically to you, you can just open the Graphical Tools as before.
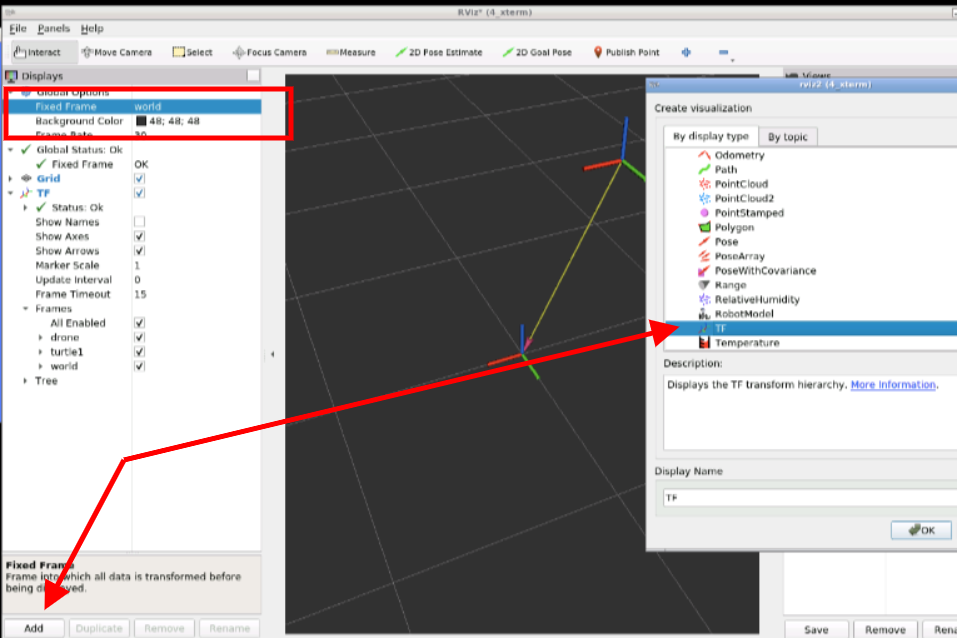
Assuming RViz is running, remember to set the fixed frame (on the top left side) to world. You also have to click the Add button on the bottom left to add TF:
RViz add TF
After having added the TF panel in RViz, you should see the frames as it happens in the center of the image above.
Moving the robot using the keyboard
Now that we have our simulation running, rviz running, and our TF panel added, we can move our robot to better understand the TFs.
TIP: In the Graphical Tools window, to see the Turtlesim and the TFs at the same time, you can put move the turtlesim panel to the left, and put RViz on the right side.
Ok, we can now open a fourth terminal and run the turtle_teleop_key node that allows us to move the robot using the keyboard:
ros2 run turtlesim turtle_teleop_key
You should now have the instructions to move the robot around:
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. 'F' to cancel a rotation.
'Q' to quit.
By pressing the arrow keys, you can see that the robot moves, and at the same time we can see the frames in RViz.
If you look carefully, in RViz we see not only the frames for the turtle and the world, but we also have a drone frame.
We did that to simulate that we have a drone following the turtle at a fixed distance. I would recommend you have a look again at the handle_turtle_pose method defined in the my_node.py to better understand it.
In the code of handle_turtle_pose, we see that the drone is 0.5 meters behind the turtle and 1 meter above:
Whenever we receive a position from the turtle, we are publishing the position of the drone based on the position of the turtle.
Checking the position of the turtle related to the world using the command line
We saw that we can do a lot of tf2-related things using Python.
It is worth mentioning that we can also use the command line to check the position/distance of the turtle with relation to the world.
ROS2 has a package named tf2_ros with many executables and one of them is tf2_echo. We can know the position of the turtle with the following command:
ros2 run tf2_ros tf2_echo world turtle1
The output should be similar to the following:
At time 1649109418.661570822
- Translation: [-2.552, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
At time 1649109419.668374440
- Translation: [-2.552, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
At time 1649109420.660446225
- Translation: [-2.552, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
You can also check the position of the drone related to the position of the robot:
ros2 run tf2_ros tf2_echo turtle1 drone
You can see that the translation is exactly as set in the my_node.py file (half meters behind, 1 meter above):
- Translation: [-0.500, 0.000, 1.000]
If you are wondering whether or not you can know the position of the drone related to the world, you can know it also just change the parameters passed to the tf2_echo node:
ros2 run tf2_ros tf2_echo world drone
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Today we will be learning ROS_DOMAIN_ID, something new in ROS2 that works on top of DDS, the communication layer.
What it really does? It basically allows you to isolate two or more ROS environments in the same physical network.
Each DOMAIN_ID would allow you to have around 120 nodes.
Creating a rosject
In order to learn ROS_DOMAIN_ID with hands-on, we need to have a system with ROS installed. We are going to use The Construct (https://app.theconstructsim.com/) for this tutorial, but if you have ROS2 installed on your own computer, you should be able to do ~everything on your own computer, except this creating a rosject part.
Let’s start by opening The Construct (https://www.theconstruct.ai/) and logging in. You can easily create a free account if you still don’t have one.
Once inside, let’s click My Rosjects on the left side and then, Create a new rosject.
Create a new rosject
Let’s select ROS2 Foxyfor the ROS Distro of the rosject, let’s name the rosject as you want. You can leave the rosject public. You should see the rosject you just created in your rosjects list (the name is certainly different from the example below that was added just for learning purposes)
If you mouse over the recently created rosject, you should see a Run button. Just click that button to launch the rosject.
Running a publisher on ROS_DOMAIN_ID=0
Assuming that you have clicked the Run button and have your rosject running, let’s now create a publisher using the terminal. For that, let’s start by opening a terminal.
Open a new Terminal
Now, let’s run the following command to run create a publisher in the first terminal:
ros2 topic pub -r 1 /string_topic std_msgs/String "{data: \"Hello from my domain\"}"
We should have the following output:
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='Hello from my domain')
publishing #2: std_msgs.msg.String(data='Hello from my domain')
publishing #3: std_msgs.msg.String(data='Hello from my domain')
publishing #4: std_msgs.msg.String(data='Hello from my domain')
publishing #5: std_msgs.msg.String(data='Hello from my domain')
publishing #6: std_msgs.msg.String(data='Hello from my domain')
publishing #7: std_msgs.msg.String(data='Hello from my domain')
...
If you look carefully at the command that we typed, we are basically creating a topic called string_topic with std_msgs/String data type and we are publishing Hello from my domain every 1 second.
Running a ROS2 Subscriber on ROS_DOMAIN_ID=0
If we open a second terminal, we can see the topics by typing ros2 topic list and we should be able to see our string_topic:
user:~$ ros2 topic list
/parameter_events
/rosout
/string_topic
We can also subscribe to that topic and see what is being published there with ros2 topic echo /string_topic, which should output:
user:~$ ros2 topic echo /string_topic
data: Hello from my domain
---
data: Hello from my domain
---
data: Hello from my domain
---
Up to now we did not setup any ROS_DOMAIN_ID, but we are running on Domain 0 (zero).
How do we know this? Because when we do not set any ROS_DOMAIN_ID, the default value is zero.
If we list the processes and grep for ros-domain, we can also see that the default ID is 0.
Let’s list the processes in a third terminal and search for ros-domain with the following command
ps -ax| grep ros-domain
We should see –ros-domain-id 0 at the end of the command line used to launch the ros2_daemon, which is launched automatically when you run your first ros2 command.
Now, let’s go to the first terminal, stop the current publisher by pressing CTRL+C, and let’s relaunch the publisher but now setting the ROS_DOMAIN_ID=1.
ROS_DOMAIN_ID=1 ros2 topic pub -r 1 /string_topic std_msgs/String "{data: \"Hello from my 2ND domain\"}"
You should see that the publisher is running as expected:
publisher: beginning loop
publishing #1: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #2: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #3: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #4: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #5: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #6: std_msgs.msg.String(data='Hello from my 2ND domain')
publishing #7: std_msgs.msg.String(data='Hello from my 2ND domain')
...
But if we check the output of the subscriber in the second terminal, we see that the messages stopped coming.
We are not receiving the new messages in the second terminal, and the reason for that is simple: the subscriber is on ROS_DOMAIN_ID=0, and the publisher is on ROS_DOMAIN_ID=1. They are basically on different ROS Networks, that is why they do not see each other.
If we now stop the subscriber by pressing CTRL+C on the second terminal, we can run it again but on ROS_DOMAIN_ID=1 to see the messages being published:
ROS_DOMAIN_ID=1 ros2 topic echo /string_topic
We should see now that the messages are correctly coming:
data: Hello from my 2ND domain
---
data: Hello from my 2ND domain
---
data: Hello from my 2ND domain
...
ROS2 topic list on different ROS_DOMAIN_IDs
So far we learned that the ros2 topic pub and ros2 topic echo commands can use different domains, but it is worth mentioning that the ROS_DOMAIN_ID thing is not restricted only to these two commands. Any ROS2 command should respect this ROS_DOMAIN_ID.
If in the second terminal we stop the subscriber with CTRL+C and run ros2 topic list , we will not see the string_topic there:
ros2 topic list
/parameter_events
/rosout
But if we set the ROS_DOMAIN_ID to 1, we will see the string_topic topic there:
ROS_DOMAIN_ID=1 ros2 topic list
/parameter_events
/rosout
/string_topic
All right! We could go on with more examples, but I think you should now have understood how ROS_DOMAIN_ID works.
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses:
Before we start really using ROS2 parameters, let’s understand key points about them:
Parameters in ROS2 are implemented/attached to/served by each node individually, as opposed to the parameter server associated with roscore in ROS1, therefore, when the node dies, so do its parameters. This is easier to understand if you already know that in ROS2 we do not have roscore.
Parameters can be loaded at the node startup or while the node is running
Having this in mind, our life now understanding ROS2 params is going to become easier.
Opening the rosject
In order to learn how to load and retrieve ROS2 Parameters, we need to have ROS installed in our system, and it is also useful to have some simulations. We already prepared a rosject with a simulation for that: https://app.theconstructsim.com/#/l/4875b2e0/.
You can download the rosject on your own computer if you want to work locally, but just by copying the rosject (clicking the link), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject.
Learn ROS2 Parameters – Run rosject
After pressing the Run button, you should have the rosject loaded. Let’s now head to the next section to really get some real practice.
Launching the turtlebot simulation with ROS2
In order to launch the simulation, let’s start by opening a new terminal:
Open a new Terminal
After having the first terminal open, let’s run the following commands to launch a simulation:
Wait some seconds until the simulation is loaded. If for any reason the simulation does not load and you see error messages like the following:
[INFO] [1649093592.180346898] [spawn_entity]: Waiting for service /spawn_entity
[ERROR] [1649093597.566604708] [spawn_entity]: Service %s/spawn_entity unavailable. Was Gazebo started with GazeboRosFactory?
[ERROR] [1649093597.567565097] [spawn_entity]: Spawn service failed. Exiting.
[ERROR] [spawn_entity.py-4]: process has died [pid 1007, exit code 1, cmd '/opt/ros/galactic/lib/gazebo_ros/spawn_entity.py -entity waffle_pi -file /home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/turtlebot3_waffle_pi/model.sdf -x 0.0 -y 0.0 -z 0.01 --ros-args']
you can just abort the current command by pressing CTRL+C in the terminal, then run the last command “ros2 launch turtlebot3_gazebo empty_world.launch.py” again.
If everything loaded fine, you should have a Turtlebot Waffle PI simulation running:
Turtlebot Waffle PI – How to use ROS2 parameters
Checking ROS2 Topics to ensure the simulation is ok
Now that our simulation is running, we can check the topics just to make sure everything loaded as expected.
For that, let’s open a second terminal and type the following command:
ros2 topic list
If you see the following list of topics, then everything has loaded fine:
If you look carefully in the list of topics, we have the topic /cmd_vel. We are going to use it to send velocity commands to the robot using ROS parameters.
Understanding the parameter_tests package
So far so good. It is now time to check the structure of our workspace. Let’s start by opening our Code Editor:
Open the IDE – Code Editor
After having the IDE open, under ros2_ws/src you should find a package named parameter_tests.
Inside that package, there is also a folder named parameter_tests with a file named parameter_tests_node.py. Please click on that file to open it and analyze its code.
The code is the following:
import rclpy
import rclpy.node
from rcl_interfaces.msg import ParameterDescriptor
from geometry_msgs.msg import Twist
class VelParam(rclpy.node.Node):
def __init__(self):
super().__init__('param_vel_node')
self.timer = self.create_timer(0.1, self.timer_callback)
self.publisher = self.create_publisher(Twist, 'cmd_vel', 10)
self.msg = Twist()
param_descriptor = ParameterDescriptor(
description='Sets the velocity (in m/s) of the robot.')
self.declare_parameter('velocity', 0.0, param_descriptor)
# self.add_on_set_parameters_callback(self.parameter_callback)
def timer_callback(self):
my_param = self.get_parameter('velocity').value
self.get_logger().info('Velocity parameter is: %f' % my_param)
self.msg.linear.x = my_param
self.publisher.publish(self.msg)
def main():
rclpy.init()
node = VelParam()
rclpy.spin(node)
if __name__ == '__main__':
main()
If you check the main function, we are basically starting the ROS node, instantiating an object of our VelParam class, and spinning that node.
On the VelParam, one of the most important parts is where we define the param_descriptor. That param descriptor is what we use to set a parameter called velocity and define its initial value as 0.0.
Every certain amount of time (0.1 sec) the timer_callback method is called.
If we now check that timer_callback method, we see that it basically reads the velocity parameter and uses it to publish a velocity to the /cmd_vel.
Running the parameter_tests_node node
Now that we understand what our node does, it is time to run it.
For that, let’s open a third terminal and run the following command:
ros2 run parameter_tests param_vel
You should see constant messages like the following:
[INFO] [1649095105.555241669] [param_vel_node]: Velocity parameter is: 0.000000
[INFO] [1649095105.559028822] [param_vel_node]: Velocity parameter is: 0.000000
[INFO] [1649095105.583306104] [param_vel_node]: Velocity parameter is: 0.000000
...
We see that the initial value of the velocity parameter is 0 (zero).
Checking ROS Parameters using the terminal
Ok, so far we see everything is working, and we were are able to set and retrieve the ROS Param using Python.
Now let’s list the parameters to identify our velocity param. Let’s open a third terminal and type ros2 param list. The output should be similar to the following:
The node we are interested in is the param_vel_node. In the output above, we can easily identify our velocity param there:
user:~$ ros2 param list
/param_vel_node:
use_sim_time
velocity
the use_sim_time is a parameter that comes in every node.
Moving the robot using ROS Parameter
That that we have the param_vel_node with the velocity param, we can easily set a value to that parameter with the following command:
ros2 param set /param_vel_node velocity 0.2
After running this command, you should see that the robot started moving.
If you also check the terminal where we launched our node, it should say the current value or our parameter:
[INFO] [1649096658.093696410] [param_vel_node]: Velocity parameter is: 0.200000
[INFO] [1649096658.181101399] [param_vel_node]: Velocity parameter is: 0.200000
[INFO] [1649096658.281628131] [param_vel_node]: Velocity parameter is: 0.200000
Remember that you can easily set the parameter to 0.0 again to stop the robot:
ros2 param set /param_vel_node velocity 0.0
Dumping ROS Parameters into a YAML file (YAML format)
Now that we saw that we can easily move the robot back and forth using ROS parameters, in case you need to somehow dump the parameters, you can easily do it with:
cd ~/ros2_ws/src/parameter_tests/config
ros2 param dump /param_vel_node
The command will generate a file named ./param_vel_node.yaml with the following content (after we have set the velocity to 0.0 again):
Loading ROS Parameters when running Node using YAML files
All right, so far we have learned how to set parameters using Python and using the command line directly through ros2 param set. Now the time has come to also learn how to launch a node and set the parameters from a YAML file.
Before we do that, feel free to change the velocity value in the param_vel_node.yaml file.
Please, go to the second terminal where you launched the node and press CTRL+C to kill it. The simulation should be kept running.
Now, launch the node again, but now loading the parameters from the YAML file using the following command:
ros2 run parameter_tests param_vel --ros-args --params-file /home/user/ros2_ws/src/parameter_tests/config/param_vel_node.yaml
Based on the logs that are printed on the screen, you should be able to see that the parameters were correctly loaded from the YAML file.
Loading ROS Parameters using launch files directly
Up to now, we were launching our node using ros2 run, but if you are familiar with ROS, you may know that we can also use ros2 launch to launch ROS2 nodes.
If you check carefully the rosject, you will find a launch file under the following path:
Congratulations, you now know all the basics about ROS Parameters in ROS2.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our youtube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses: