I install ROS 2 Foxy in Docker images, but It is similar at Local Ubuntu, too
If you are using the Ubuntu 20.04 image in a Docker environment, nothing will be installed.
In this case, you can go through several steps for initial setup and then install by following the ROS2 Foxy Install Document above.
If you want to learn more about ROS 2 and dive deeper into robotics, check out the Robotics Developer Masterclass, where you’ll master robotics development from scratch and get 100% job-ready to work at robotics companies.
1. Initial Setup:
If you’re using the Ubuntu 20.04 image in a Docker environment, run the following commands for initial setup: apt update
apt install sudo
For local installations, skip this step if sudo is already installed.
Here is really Important step, Binary Install Ros2 foxy. This is not by Source file. I will take more than 10 minutes. Desktop Install (Recommended): ROS, RViz, demos, tutorials. sudo apt install ros-foxy-desktop python3-argcomplete
ROS-Base Install (Bare Bones): Communication libraries, message packages, command line tools. No GUI tools. sudo apt install ros-foxy-ros-base python3-argcomplete
Install Development tools sudo apt install ros-dev-tools
If you clear all the step, You can use Ros2 Foxy
use this command to check cd /opt/ros/foxy
You can see /opt/ros/foxy folder.
If you want to check Ros2 is clearly install
4. Environment Setup:
Before Using Ros2 Foxy, You have to Environment setup.
In Document, source /opt/ros/foxy/setup.bash use this command, But by this way, You have to do this step all the time you close terminal.
So I recommend you write in ~/.bashrc file.
For this way, You have to install vim sudo apt install vim
If you successfully install Vim, use this command to open ~/.bashrc vi ~/.bashrc
You can see the file that write a lot of command, at the end of the file, Input i to change insert mode and write source /opt/ros/foxy/setup.bash
then use :wq command, save the file.
And use this command to source ~/.bashrc file source ~/.bashrc
Then You can use ROS2 Foxy, Without working on the source every time
5. Verification: To verify a successful installation, run an example:
Now, finally, we can check whether ROS2 is installed properly through one example.
You have to run two terminal.
At one terminal ros2 run demo_nodes_cpp talker
another Terminal ros2 run demo_nodes_py listener
You can see that messages are exchanged and the same result is shown. If this example runs well, you have performed a clean installation of ROS2 Foxy. Now you can freely use ROS2 Foxy.
To ensure stability, I’ll guide you through installing ROS2 Foxy on your Ubuntu 20.04 system. If you prefer watching a detailed video tutorial (in Korean), you can check this video below.
How to manipulate multiple parameters in ROS2 from the command line using parameter services
Overview
Parameters in ROS 2 can be get, set, listed, and described through a set of services for nodes that are already running. In fact, the well-known and convenient ros2 param command-line tool is a wrapper around these service calls that makes it easy to manipulate parameters from the command-line.
In this tutorial, you will learn how to manipulate multiple parameters in ROS2 from the command line using parameter services rather than ros2 param commands which can only work with one parameter at a time. You will get an introduction to using all of the parameter services via the CLI, not just SetParameters:
srv/GetParameterTypes
srv/DescribeParameters
srv/SetParametersAtomically
srv/GetParameters
srv/ListParameters
srv/SetParameters
Prerequisite:
Basic understanding of parameters
Familiarity with using the ros2 param command-line tool
Basic knowledge of services
If you want to learn more advanced ROS 2 topics, including parameters and more, in a practical, hands-on way, check out the course Intermediate ROS 2: https://app.theconstruct.ai/courses/113
Opening the rosject
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject for that: https://app.theconstruct.ai/l/6111a6de/
Just by copying the rosject (clicking the link above), you will have a setup already prepared for you.
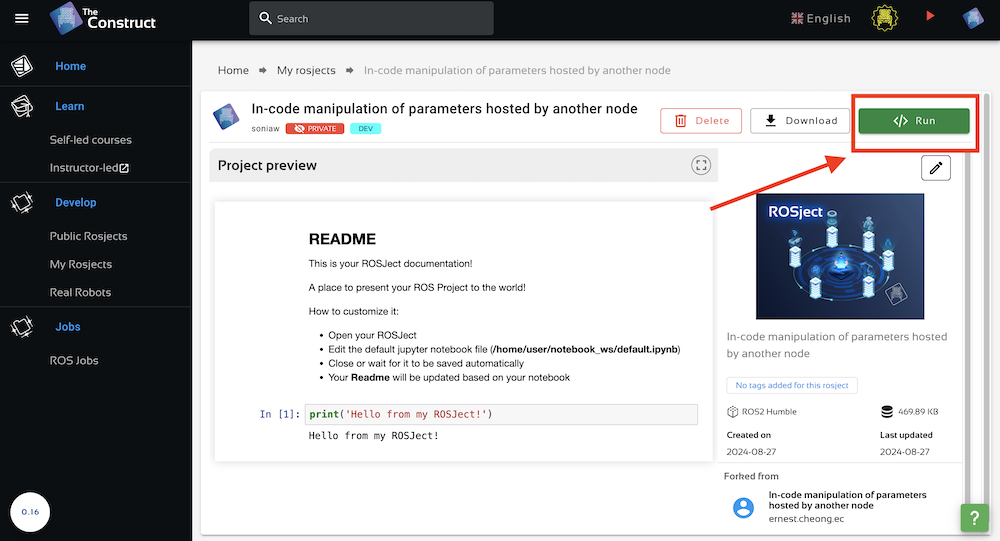
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject.
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
In order to interact with ROS2, we need a terminal.
Let’s open a terminal by clicking the Open a new terminal button.
Create a ROS2 python package with a simple node that has two parameters
Create a python package called python_parameters:
cd ~/ros2_ws/src/
ros2 pkg create --build-type ament_python python_parameters --dependencies rclpy
Create a python node called python_parameters_node.py:
cd ~/ros2_ws/
colcon build --packages-select python_parameters
Run the node
In one terminal, start the node:
source ~/ros2_ws/install/setup.bash
ros2 run python_parameters minimal_param_node
You should get something like this:
[INFO] [1713695285.349594469] [minimal_param_node]: I am me!
[INFO] [1713695285.349875641] [minimal_param_node]: You are you!
[INFO] [1713695286.337758113] [minimal_param_node]: I am me!
[INFO] [1713695286.338776447] [minimal_param_node]: You are you!
[INFO] [1713695287.337323765] [minimal_param_node]: I am me!
[INFO] [1713695287.338010397] [minimal_param_node]: You are you!
Setting a parameter using ros2 param set
In a different terminal, get a list of all parameters:
ros2 param list
You should see both my_parameter and your_parameter in the output:
The usual way to set parameters dynamically during runtime is to use the ros2 param set. For example we can modify the value of your_parameter to be 'a student':
ros2 param set /minimal_param_node your_parameter 'a student'
You can see that the value of your_parameter has changed:
[INFO] [1713695285.349594469] [minimal_param_node]: I am me!
[INFO] [1713695285.349875641] [minimal_param_node]: You are a student!
[INFO] [1713695286.337758113] [minimal_param_node]: I am me!
[INFO] [1713695286.338776447] [minimal_param_node]: You are a student!
[INFO] [1713695287.337323765] [minimal_param_node]: I am me!
[INFO] [1713695287.338010397] [minimal_param_node]: You are a student!
However if you want to set multiple parameters at once, you need to use the SetParameters service as shown in the following section.
Setting multiple parameters using SetParameters service type
Kill and restart the node to reset the parameter values before continuing onto this section.
Begin by listing all active services along with their types:
ros2 service list -t
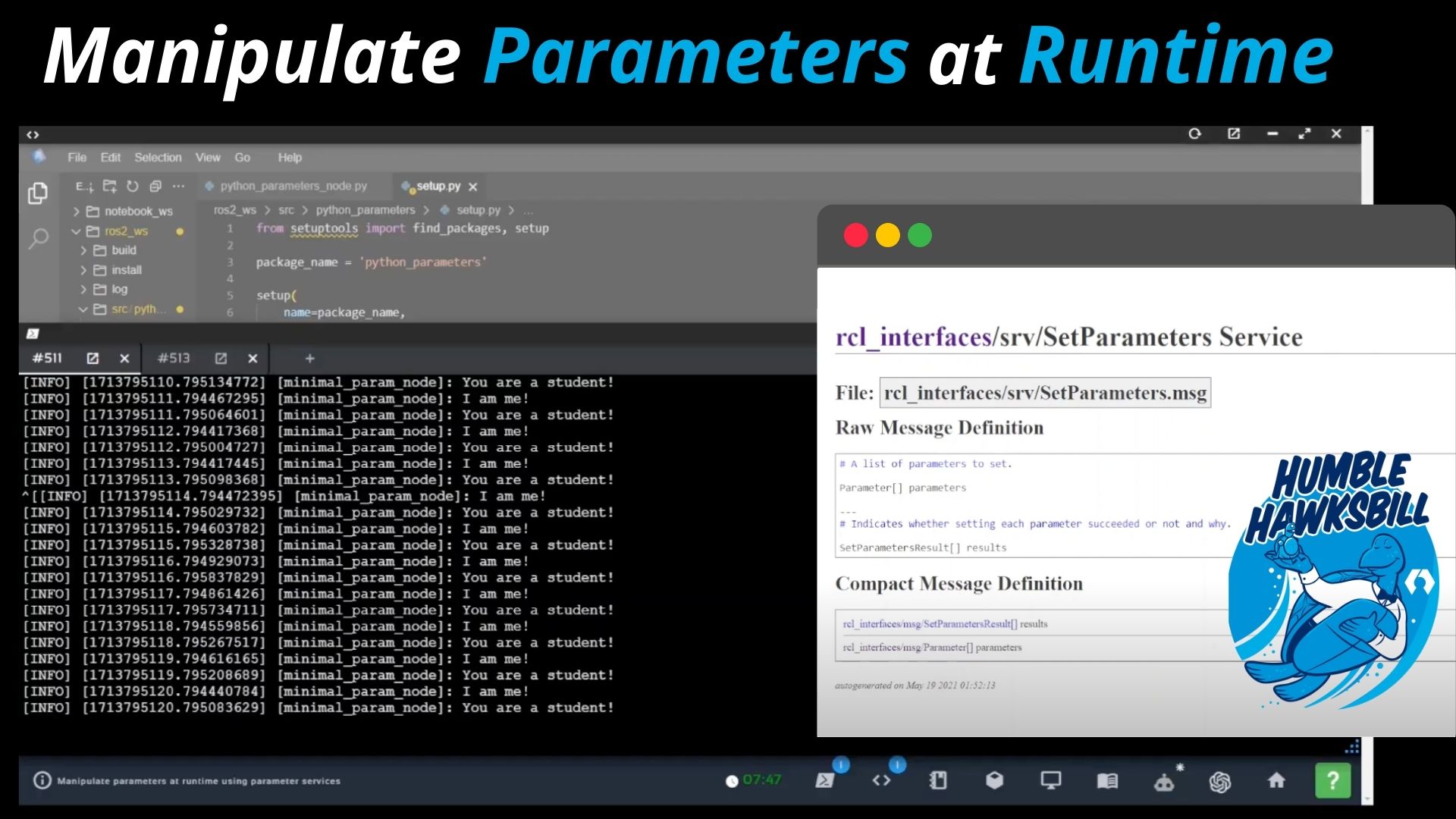
You should see 6 services including the one that we need named /minimal_param_node/set_parameters with type rcl_interfaces/srv/SetParameters:
ros2 interface show rcl_interfaces/srv/SetParameters
The result is this:
# A list of parameters to set.
Parameter[] parameters
string name
ParameterValue value
uint8 type
bool bool_value
int64 integer_value
float64 double_value
string string_value
byte[] byte_array_value
bool[] bool_array_value
int64[] integer_array_value
float64[] double_array_value
string[] string_array_value
---
# Indicates whether setting each parameter succeeded or not and why.
SetParametersResult[] results
bool successful
string reason
This means we need to send a list of parameters each with a name and value. So our service call should look something like this:
ros2 service call /minimal_param_node/set_parameters rcl_interfaces/srv/SetParameters "{parameters: [{name: 'my_parameter', value: {type: 4, string_value: 'a teacher'}}, {name: 'your_parameter', value: {type: 4, string_value: 'a student'}}]}"
Here, we want to set the my_parameter value to ‘a teacher’ and the your_parameter value to ‘a student’. Note that each value contains a type that we specify using an enumerator integer. In this case, we used 4 to specify the type as a string.
As a result of running the service call, the terminal running the node should look like this
[INFO] [1713695815.623062990] [minimal_param_node]: I am a teacher!
[INFO] [1713695815.623966588] [minimal_param_node]: You are a student!
[INFO] [1713695816.623087905] [minimal_param_node]: I am a teacher!
[INFO] [1713695816.624100118] [minimal_param_node]: You are a student!
[INFO] [1713695817.622963432] [minimal_param_node]: I am a teacher!
[INFO] [1713695817.623739529] [minimal_param_node]: You are a student!
Note that this service only modifies parameters that succeed in being set. For example if you give an incorrect type, then it will not be modified. In the following service call, my_parameter is specified incorrectly as an integer type using 2, whilst your_parameter is correctly specified as a string. Kill and restart the node first to reset the parameter values before running:
ros2 service call /minimal_param_node/set_parameters rcl_interfaces/srv/SetParameters "{parameters: [{name: 'my_parameter', value: {type: 2, string_value: 'a teacher'}}, {name: 'your_parameter', value: {type: 4, string_value: 'a student'}}]}"
As you can see, only your_parameter has changed:
[INFO] [1713748978.412585151] [minimal_param_node]: I am me!
[INFO] [1713748978.413301978] [minimal_param_node]: You are a student!
[INFO] [1713748979.413749236] [minimal_param_node]: I am me!
[INFO] [1713748979.414882976] [minimal_param_node]: You are a student!
[INFO] [1713748980.413437082] [minimal_param_node]: I am me!
[INFO] [1713748980.414682416] [minimal_param_node]: You are a student!
Calling other parameter services
Kill and restart the node to reset the parameter values before continuing onto this section.
SetParametersAtomically
This attempts to set the given list of parameter values just like SetParameters. However if any parameter fails to be set, then none of them are set.
Sending the same request from before where my_parameter was set to the wrong type results in none of the parameters being modified.
ros2 service call /minimal_param_node/set_parameters_atomically rcl_interfaces/srv/SetParametersAtomically "{parameters: [{name: 'my_parameter', value: {type: 2, string_value: 'a teacher'}}, {name: 'your_parameter', value: {type: 4, string_value: 'a student'}}]}"
This service call (where both types are correct) successfully sets both values.
ros2 service call /minimal_param_node/set_parameters_atomically rcl_interfaces/srv/SetParametersAtomically "{parameters: [{name: 'my_parameter', value: {type: 4, string_value: 'a teacher'}}, {name: 'your_parameter', value: {type: 4, string_value: 'a student'}}]}"
GetParameters
This service call returns a list of parameter values.
ros2 service call /minimal_param_node/get_parameters rcl_interfaces/srv/GetParameters "{names: ['my_parameter', 'your_parameter']}"
GetParameterTypes
This service call returns a list of parameter types.
ros2 service call /minimal_param_node/get_parameter_types rcl_interfaces/srv/GetParameterTypes "{names: ['my_parameter', 'your_parameter']}"
DescribeParameters
This service call returns a list of parameter descriptors.
ros2 service call /minimal_param_node/describe_parameters rcl_interfaces/srv/DescribeParameters "{names: ['my_parameter', 'your_parameter']}"
ListParameters
This service call returns a list of available parameters given an optional list of parameter prefixes. In this case it returns a list of all parameters starting with ‘my’ and ‘your’.
ros2 service call /minimal_param_node/list_parameters rcl_interfaces/srv/ListParameters "{prefixes: ['my', 'your']}"
Now you know how to manipulate parameters at runtime
Congratulations. You now have a basic understanding of parameters.
To learn more advanced topics about ROS 2, have a look at the course below:
Sa maikling gabay na ito, ating dadaluban nang pahapyaw ang konsepto ng ROS2 Services at kung paano gumawa ng Service Server.
Bilang gabay sa mga tatalakayin ng proyektong ito, sila ay nakalista bilang mga sumusunod:
1. Introduksyon sa Kurso 2. Pagpapahayag ng Konsepto ng ROS2 Services 3. Paglikha at Paggamit ng ROS2 Service sa Pamamagitan ng Isang Service Server
– Dulo ng Buod –
Unit 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian
Para sa kursong ito, tinataya ng may-akda na may kaalaman ka na sa pangunahing operasyong pang-terminal ng mga sistemang gumagana sa Ubuntu 22.04 LTS na OS at maging sa pangunahing nabigasyon and commands na ginagamit sa mga Linux terminals. Kung nais mo pang matuto ng mga programming fundamentals na kailangan para sa pag-aral ng ROS, mangyaring tumungo at tignan ang kursong Code Foundation for ROS Learning Path ng The Construct! Tiyak na matututunan mo ang lahat ng kailangan mong kaalaman upang masimulan mo na ang paggamit ng ROS!
At kung interesado ka na rin sa kung paano gumawa ng mga packages at nodes sa ROS2, mangyaring tignan mo na rin ang gabay na ito: How to Create Packages and Nodes in ROS2
Sa tutorial na ito, Gagamitin natin ang ROSject platform na handog ng TheConstruct! Subalit, kung nais niyong gumamit ng sariling virtual machine o computer, mangyaring gawing gabay ang OS-to-Distribution compatibilities na siyang ibinahagi ng opisyal na dokumentasyon ng ros.org para sa ROS2 Humble Hawksbill
* ROS2 Humble Hawksbill: PC o Virtual Machine na may Ubuntu 22.04 LTS
Unit 2: ROS2 Services
Noong nakaraan, ating tinalakay ang kalikasan ng iba’t-ibang interfaces na maaari nating gamitin sa ROS2, partikular na ang mga mesages. Ngayon, atin namang tatalakayin ang konsepto ng mga Services!
Bilang panguna, ano nga ba ang mga ROS2 Services?
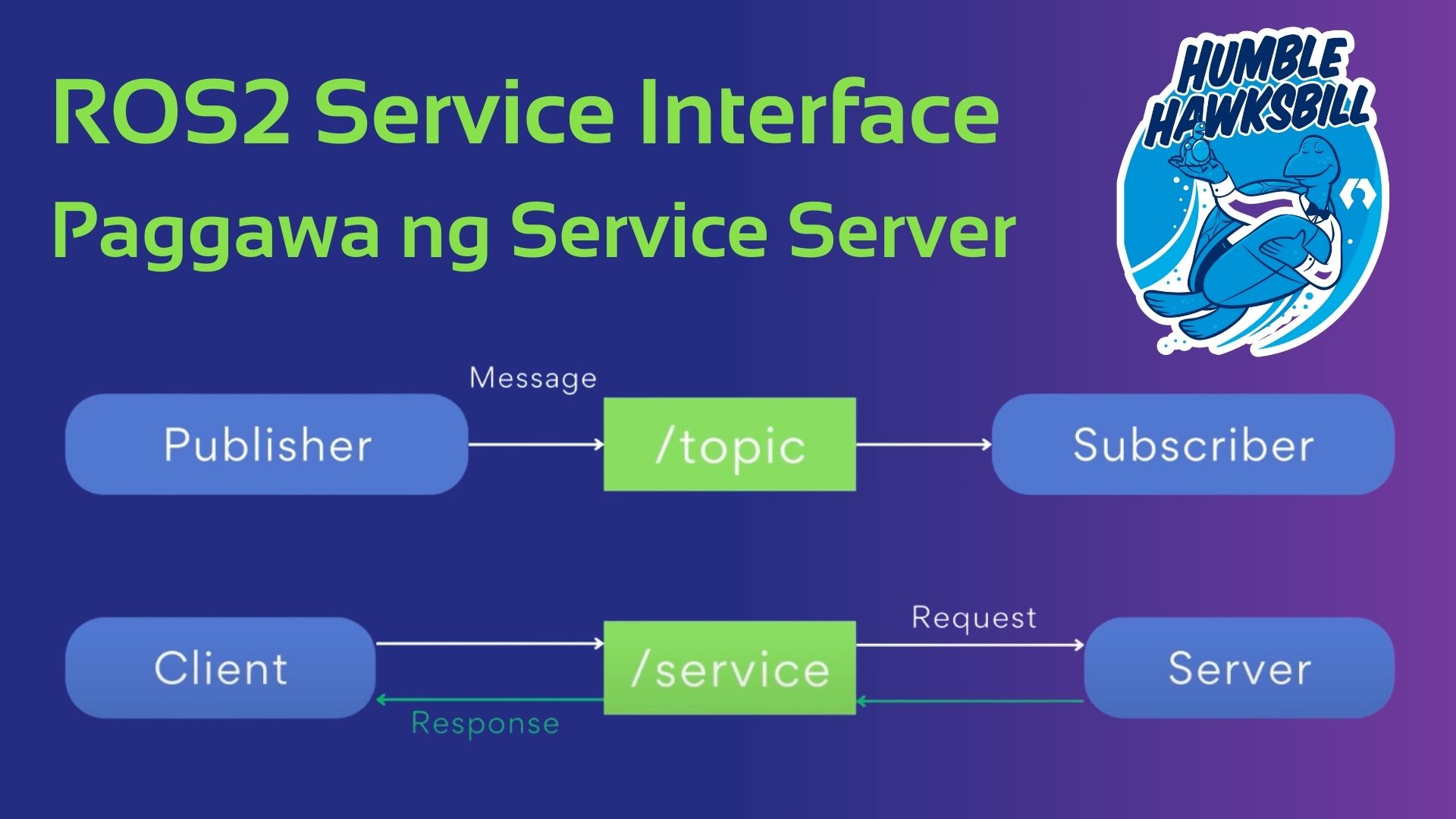
Kung ating aalalahanin, ang mga ROS2 messages ay naglalaman lamang ng isang lipon ng mga variable na maaari nating gamitin para sa ugnayang publisher-subscriber. At dahil sa ganitong istruktura, masasabing unidirectional lamang ang nagaganap na komunikasyon. Ang kahulugan nito ay walang interaksyon o feedback mechanism na nagaganap sa pagitan ng mga nodes. Ngayon, ang services naman ay siyang nagtataglay ng dalawang pangunahing fields — ang request at response.
Ang request field ay siyang lipon ng mga variable na, mula sa client, ay kukunin ng isang server mula sa isang service, at siyang gagamitin upang makapgpabalik ng tinatawag na response. Maaari natin itong ihalintulad sa proseso ng pagtala natin ng order mula sa isang kainan. Tayo ang nagsisilbing mga client, ang mga staff ang silang itinuturing na service, at ang kainan naman ang mismong server. Bale, magpapadala tayo ng ating request — depende sa kung ano ang ating nais na kainin (request)– at ito naman ay ipapadala sa kusina (server) sa pamamagitan ng mga staff (service), at pagtapos nang lutuin ay siyang ibibigay sa atin (response).
Kung ating ihahalintulad ang arkitektura nito sa ugnayang publisher-subscriber, maituturing nating katimbang ng publisher ang service client na siyang nagpapadala ng mga message. At maituturing nating kahalintulad ng /topic ang /service na siyang nagsisilbing channel upang mapadala at matanggap ang mga ito. Ang pinakamalaking pinagkaiba lamang sa konteksto ng client-server na ugnayan ay ang pagkakaroon ng tinatawag na response. Sa publisher-subscriber, matapos na matanggap ng subscriber ang message mula sa topic, wala na itong ibinabalik na value para sa node na nagpadala ng naturang halaga na iyon; subalit, para naman sa client-server na ugnayan, magpapadala ng request ang client at ibabalik naman ng server ang response.
Ngayon at malinaw na sa atin ang konsepto ng Services at ang Client-Server na uganayan, halina’t gumawa tayo ng Server!
Unit 3: Paglikha at Paggamit ng ROS2 Service sa Pamamagitan ng Isang Service Server
1. Lumikha ng Workspaces folder na siyang maglalaman ng lahat ng ating workspaces
# In Terminal 1
user@user:~$ mkdir Workspaces
2. Sa loob nito, gumawa ng ating workspace folder – ros2_ws – at sa loob ng workspace folder na ito, gumawa ng isa pang ‘src’ folder na siyang maglalaman ng ating package na siyang papangalanang ‘simple_adder’
# In Terminal 1
user@user:~$ cd Workspaces
user@user:~/Workspaces$ mkdir ros2_ws
user@user:~/Workspaces$ cd ros2_ws
user@user:~/Workspaces/ros2_ws$ mkdir src
user@user:~/Workspaces/ros2_ws$ cd src
user@user:~/Workspaces/ros2_ws/src$ ros2 pkg create simple_adder --build-type ament_python --dependencies rclpy std_msgs example_interfaces
3. Buuin ang naturang workspace
user@user:~/Workspaces/ros2_ws$ colcon build
4. Sa loob nito, gawin natin ang ating server file – simple_adder_server.py – at gawin itong executable
user@user:~/Workspaces/ros2_ws$ cd src/simple_adder/simple_adder
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ touch simple_adder_server.py
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ chmod +x simple_adder_server.py
5. Source Code para sa simple_adder_server.py
#!/usr/bin/env python3
# Import necessary libraries | I-import ang mga kinakailangang library
import rclpy
from rclpy.node import Node
from example_interfaces.srv import AddTwoInts
class SimpleAdderNode(Node):
def __init__(self):
super().__init__("simple_adder")
# Likhain ang server
self.server_ = self.create_service(AddTwoInts, "add_ints_service", self.callback_add_ints_service)
# Gumawa ng logger upang malaman kung gumagana na ang server
self.get_logger().info("Add Ints Server Currently Active!")
# Ilikha ang callback para sa ginawang server. Dito mangyayari ang pagproproseso ng requests upang makapagpadala ng response
def callback_add_ints_service(self, request, response):
response.sum = request.a + request.b
self.get_logger().info("The sum of "+str(request.a)+" and "+str(request.b)+" is "+str(response.sum))
return response
def main(args=None):
rclpy.init(args=args)
node = SimpleAdderNode()
rclpy.spin(node)
rclpy.shutdown()
if __name__=="__main__":
main()
6. I-install ang node sa loob ng setup.py
# Hanapin ang console scripts sa ilalim ng setup.py at idagdag ang mga ito:
"simple_adder_server=simple_adder.simpler_adder_server:main"
7. Muling buuin ang package
user@user:~/Workspaces/ros2_ws/src/simple_adder/simple_adder$ cd ../../../
user@user:~/Workspaces/ros2_ws$ colcon build --packages-select simple_adder --symlink-install
user@user:~/Workspaces/ros2_ws$ ros2 run simply_adder simple_adder_server
10. Sa isa pang terminal, i-source ang install/setup.bash ng naturang workspace
user@user:~$ cd Workspaces/ros2_ws
user@user:~/Workspaces/ros2_ws$ source install/setup.bash
11. Tawagin ang naturang server
user@user:~/Workspaces/ros2_ws$ ros2 service call add_ints_server example_interfaces/srv/AddTwoInts "{a: 5, b: 10}"
At ayan! Matagumpay tayong nakalikha ng Service Server at matawag ang service nito! Kapag tapos ka nang magsiyasat, maaarin mong pindutin ang “ctrl + c” upang patayin na ang naturang node. At diyan nagtatapos ang ating maikling gabay hinggil sa paggawa ng custom messages! Nawa’y may natutunan kayong bago na makatutulong sa inyong pag-aaral ng ROS!
Para sa iba pang mga ROSject na tulad nito, mangyaring bisitahin ang The Construct. Nag-aalok sila ng napakaraming praktikal na mga gabay sa ROS mula sa mga payak hanggang sa mga konseptong pangbihasa na!
Hanggang sa muli! Ito si Christian C. Anabeza, ang inyong FIlipino Robotics Ambassador!
Dans ce tutoriel, nous allons voir comment utiliser ROSLibjs avec ROS2 pour tirer parti de la puissance de ROS dans des applications web et JavaScript. Nous allons mettre en place un exemple simple d’une page HTML utilisant ROSLibjs pour communiquer avec un système ROS2. L’objectif du tutoriel sera d’utiliser un publisher et un subscriber depuis notre page web pour interagir avec un turtlebot3 simulé dans Gazebo.
Prérequis: Utiliser une installation ROS2 avec Gazebo
ROS2
Vous pouvez vous connecter au site TheConstruct pour acceder à des machines virtuelles préconfigurées avec une installation ROS. Ce tutoriel est realisé avec ROS Humble.
# pour installer tous les packages du turtlebot3# remplacez humble par votre distro ROS2cd~/ros2_wscolconbuildsourceinstall/setup.bashsudoapt-getinstallros-humble-turtlebot3*# n'oubliez pas d'exporter le modèle de Turtlebot3 que vous souhaitez utiliserexportTURTLEBOT3_MODEL=waffle_pi
Nous allons ensuite lancer la simulation du turtlebot3 dans gazebo. Le turtlebot3 va publier les topics que nous allons utiliser dans le tutoriel.
Partie 1: Concepts
rosbridge_suite (https://github.com/RobotWebTools/rosbridge_suite) avec le node rosbridge-server fournit un serveur WebSocket qui donne accès aux fonctionnalités de ROS pour des programmes non-ROS. WebSocket est un protocole de communication qui permet une communication bidirectionnelle entre les clients et les serveurs à travers une connexion unique et durable. Des clients roslib ont été développés dans differents languages de programmation (Python, Rust, Java, Javascript). rosbridge_server permet donc une intégration entre ROS avec un large éventail de technologies, notamment des applications Web, des appareils mobiles, des environnements de simulation. Dans ce tutoriel nous allons apprendre à utiliser roslibjs qui permet d’interagir avec l’ecosystème ROS en utilisant Javascript. Nous allons créer ensemble une interface web simple permettant d’interagir avec un robot simulé sur Gazebo.
Partie 2: Implémentation
Nous allons dans un premier temps créer une page web index.html dans le dossier webpage_ws. Cette page web html execute du javascript pour utiliser ROSlibjs et déclarer notre publisher et notre subscriber:
<!DOCTYPE html>
<htmllang="en"><head><metacharset="UTF-8"><metaname="viewport"content="width=device-width, initial-scale=1.0"><title>ROS2ROSLIBjsexample</title><linkrel="stylesheet"type="text/css"href="style.css"></head><body><h1>ROS2ROSLIBjsexample</h1><divclass="container"><!-- Inputs pour publier le message Twist sur le topic cmd_vel -->
<div><labelfor="linearSpeed">LinearSpeed:</label><inputtype="number"id="linearSpeed"step="0.1"value="0"><labelfor="angularSpeed">AngularSpeed:</label><inputtype="number"id="angularSpeed"step="0.1"value="0"><!-- Appelle la fonction submitInputsTwist qui va publier un Twist message -->
<buttononclick="submitInputsTwist()">PublishTwist</button></div><!-- Zone de texte pour afficher les messages reçu par le subscriber d'odom -->
<div><h2>ReceivedOdometry</h2><textareaid="odometryData"readonly></textarea></div><!-- Joystick pour controler le robot en publiant sur cmd_vel -->
<divid="joyDiv"style="width:200px;height:200px;margin-bottom:20px;"></div></div><!-- Pour importer roslibjs -->
<scriptsrc="https://s3.eu-west-1.amazonaws.com/rosject.io/js/roslib.min.js"></script><!-- La repository github du joystick https://github.com/bobboteck/JoyStick -->
<scriptsrc="https://github.com/bobboteck/JoyStick/releases/download/v2.0.0/joy.min.js"></script><!-- Javascript -->
<script>//Ondéclarenotreclientvarros=newROSLIB.Ros();varrosbridgeUrl='ws://localhost:9090';//Remplacerlocalhost:9090parl'url rosbridge_server URL (et ne pas ajouter:port)//ConnecteauROS2environmentros.on('connection',function(){console.log('Connected to ROS1 environment.');});//Gérerlescasdedéconnectionros.on('error',function(error){console.error('Error connecting to ROS1 environment:',error);});ros.on('close',function(){console.log('Connection to ROS1 environment closed.');});//Déclarelesvariablequipermettentd'interagir avec les topics ROSvartwistTopic=newROSLIB.Topic({ros:ros,name:'/cmd_vel',messageType:'geometry_msgs/Twist'});varodometryTopic=newROSLIB.Topic({ros:ros,name:'/odom',messageType:'nav_msgs/Odometry'});//SubscribeautopicodometdéfinitlafonctioncallbackodometryTopic.subscribe(function(message){console.log(message)//Changelavaleurdelatexteareaaveclemessagereçudepuisletopicdocument.getElementById('odometryData').value=JSON.stringify(message,null,2);});functionpublishTwist(linearSpeed,angularSpeed){//DeclareleTwistmessagepourpouvoirpublierlesvaleursenentréedelafonctionvartwist=newROSLIB.Message({linear:{x:linearSpeed,y:0,z:0},angular:{x:0,y:0,z:angularSpeed}});//PublieleTwistmessagesurletopiccmd_veltwistTopic.publish(twist);}//ConnecteauROS2environmentros.connect(rosbridgeUrl);//LafonctionappelléelorsquePublishTwistestcliquéfunctionsubmitInputsTwist(){//RécupèrelesvaleursdesinputspourlinearSpeedetangularSpeedvarlinearSpeed=parseFloat(document.getElementById('linearSpeed').value);varangularSpeed=parseFloat(document.getElementById('angularSpeed').value);publishTwist(linearSpeed,angularSpeed);}//Declarelejoystickpourpublierlesdonnéessurcmd_velvarJoy1=newJoyStick('joyDiv',{},function(stickData){//RécupèrelesvaleursdesaxesdujoysticksletangularSpeed=-stickData.x/50;letlinearSpeed=stickData.y/50;//DeclareleTwistmessagepourpouvoirlepubliervartwist=newROSLIB.Message({linear:{x:linearSpeed,y:0,z:0},angular:{x:0,y:0,z:angularSpeed}});//PublieleTwistmessagesurletopiccmd_veltwistTopic.publish(twist);});</script></body></html>
Pour résumer le code ci-dessus:
On écrit notre page HTML qui va servir d’interface utilisateur.
Dans notre Javascript, on crée le client websocket ROSLib et on crée les fonctions qui seront appelées pour differents évenements de la websocket (connection, error, close).
On déclare ensuite les variables qui vont nous permettre d’interagir avec les topics.
On subscribe au topic /odom et on modifie la valeur du textarea odometryData dans le callback.
On crée la fonction publishTwist qui est appelée lorsque le bouton Publish Twist est appelé, elle permet de publier les valeurs.
On déclare le joystick et on appelle la fonction publishTwist pour publier sur le topic cmd_vel les valeurs des axes du joysticks.
Vous pouvez également ajouter le fichier CSS style.css:
Nous allons voir dans la partie suivante comment l’ouvrir en utilisant notre environnement de développement.
Partie 3: Tester le système
Pour tester l’interface exemple du tutoriel, vous devez dans un premier temps lancer la simulation du turtlebot3 avec la commande suivante dans un premier terminal:
Les prochaines étapes sont seulement pour faire fonctionner l’exemple dans un rosject de theConstuct. Dans un nouveau terminal, vous devez lancer un server python pour hoster la page web via l’installation de theConstruct:
python3-mhttp.server7000
Ouvrez un terminal et lancez les commandes suivantes:
# pour obtenir l'url de la page web htmlwebpage_address# pour obtenir l'adresse de la websocket fournit par l'installation theConstructrosbridge_address
Vous devrez utiliser l’adresse websocket rosbridge_address dans la variable rosbridgeUrl du code.
Si vous effectuez le tutoriel sur votre machine locale, vous pouvez ouvrir directement votre page html avec votre navigateur et l’adresse de la websocket ws://0.0.0.0:9090 (port par defaut utilisé par le node rosbridge_server).
Vous pouvez maintenant ouvrir l’interface créée precedemment en ouvrant le ficher index.html dans votre navigateur. Vous devriez obtenir le résultat suivant:
Dans la textarea, vous pouvez voir l’odometry du robot mis à jour à chaque message reçu. Vous devriez pouvoir également pouvoir déplacer le turtlebot3 en utilisant les textes inputs ou le joystick pour publier sur le cmd_vel.
Feedback
Cet article vous a plu ? Avez-vous des questions sur ce qui est expliqué ? Quoi qu’il en soit, n’hésitez pas à laisser un commentaire dans la section des commentaires ci-dessous, afin que nous puissions interagir et apprendre les uns des autres.
Si vous souhaitez en savoir plus sur d’autres sujets liés à ROS, faites-le nous savoir dans l’espace commentaires et nous ferons une vidéo ou un article à ce sujet.
Topics: ROS Q&A | ros2