Cách khai báo tọa độ cho robot để di chuyển trong không gian Gazebo và RViz
Cách tạo câu lệnh để điều khiển robot di chuyển với gói Nav2
Cách sử dụng Nav2 trên RViz để tạo đường đi cho robot
Phần 1: https://www.theconstruct.ai/lam-sao-de-mo-phong-nhieu-robot-su-dung-nav2-trong-khong-gian-gazebo-voi-ros2-humble-phan-1-ros2-vietnamese-tutorial/
Ở phần 1 của blog “Làm sao để mô phỏng nhiều robots trên Gazebo với Nav2” chúng ta đã tạo thành công gọi được robots trên môi trường Gazebo và Rviz. Tiếp theo, ở phần 2 chúng ta sẽ được làm quen với gói Navigation ROS2. Có thể mọi người đã quen với việc sử dụng Nav2 với một robot nhưng với nhiều robots thì sẽ sử dụng như thế nào. Vì vậy, blog này sẽ giới thiệu với các bạn 2 cách để điều khiển robot với câu lệnh và click chuột.
Khởi động rosject
Như mọi lần rosject sẽ là công cụ hoàn hảo cho việc thực hiện project này, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
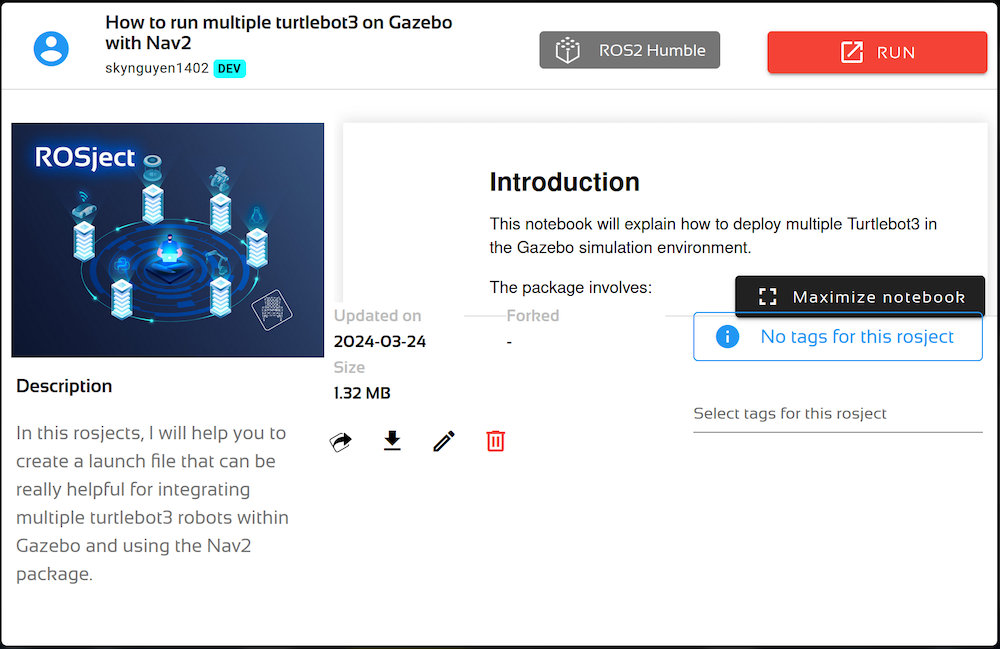
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2pGt7Ge
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Khởi động và chạy mô phỏng Gazebo
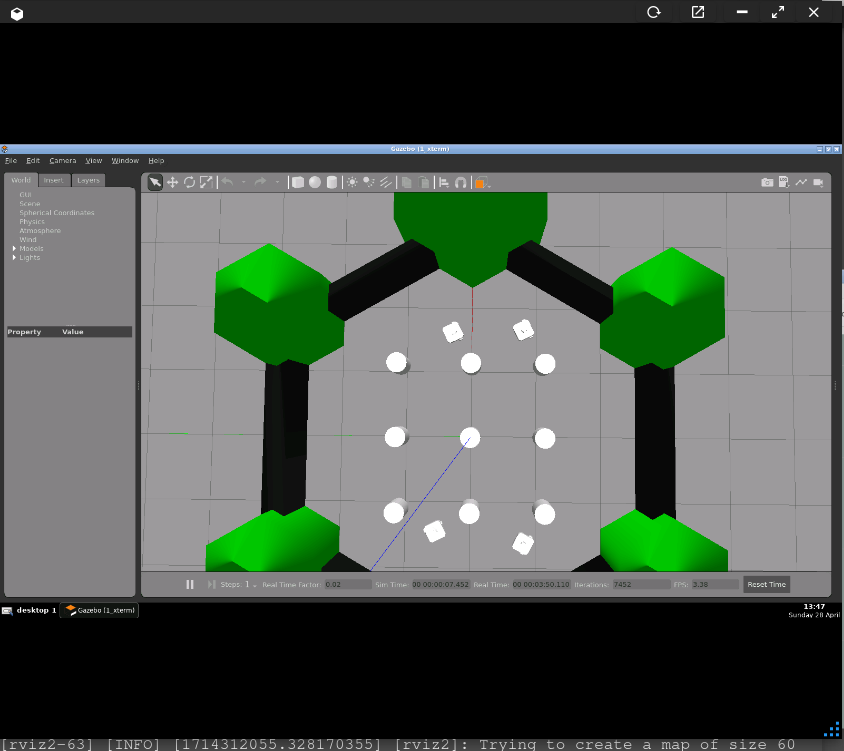
Sau khi thực hiện theo hướng như phần 1, sau đây các bạn chỉ cần chạy launch file vào môi trường Gazebo và Rviz bằng câu lệnh sau. Bên cạnh đó, cửa sổ RViz có thể bật tắt bằng cách sử dụng chế độ enable_rviz:
Ở đây các bạn cần chú ý cho mình chức năng enable_drive:=True . Khi các bạn chọn True đồng nghĩa với việc các bạn sẽ điều khiển tất cả các robots cùng một lúc ví dụ như hình ở dưới. Các robot sẽ tự động di chuyển đến đích theo vị trí các bạn chọn sẵn. Cho nên khi các bạn muốn điều khiển một robot nào trong số các robot có trong môi trường. Các bạn cần phải lựa chọn enable_drive:=False
https://flic.kr/p/2pMW58B
https://flic.kr/p/2pMQtHy
Cách di chuyển robot với Nav2 Goal trên Rviz
Nếu các bạn đã quen thuộc với Rviz thì các bạn sẽ thấy rằng Rviz cũng cấp cho chúng ta rất nhiều công cụ bổ ích trong đó bao gồm cả Navigation. Lệnh khởi chạy (launch) cài đặt pose ban đầu bằng việc sử dụng topic /initialpose. Bên dưới thanh công cụ của Rviz các bạn sẽ thấy kí hiệu mũi tên màu xanh với tên gọi là Nav2 Goal.
https://flic.kr/p/2pMWNNc
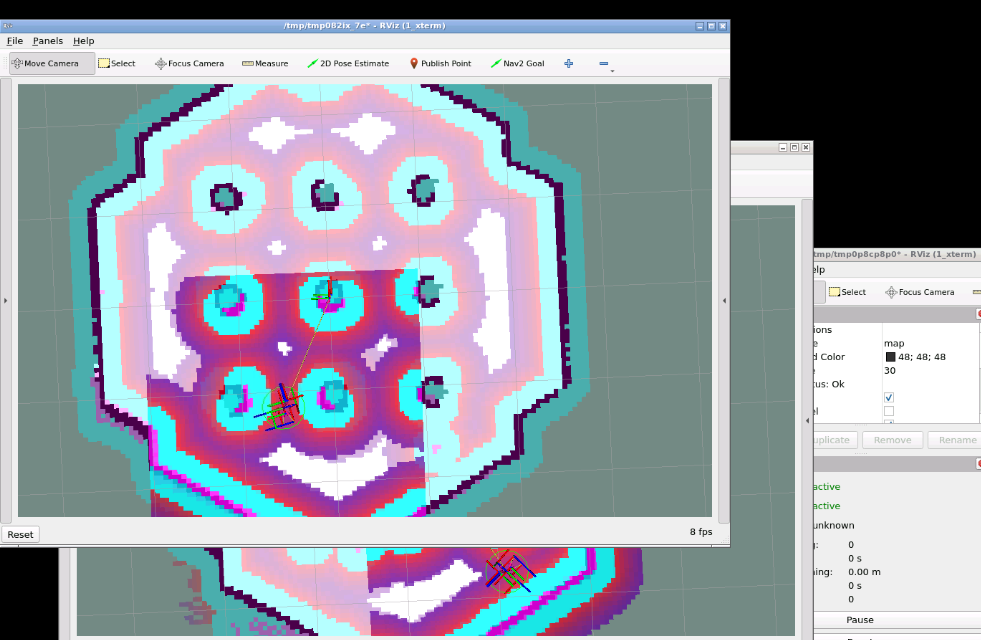
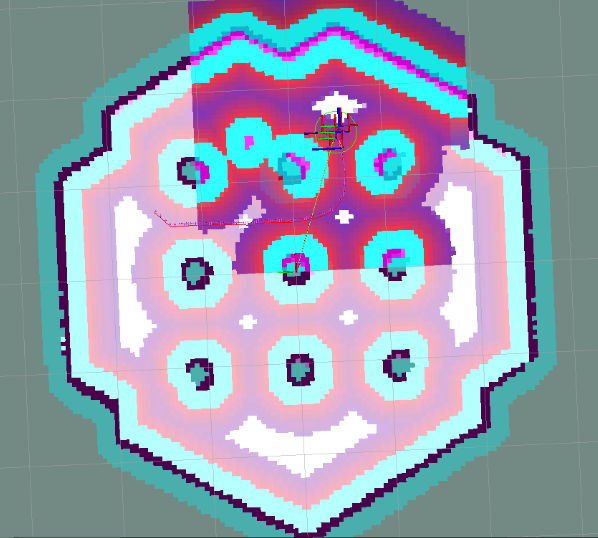
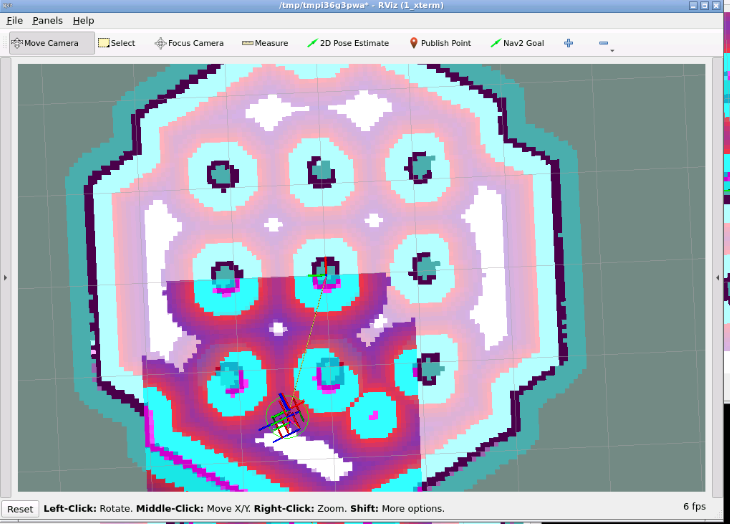
Khi các bạn click vào nút này, các bạn có thể lựa chọn bất kỳ điểm nào trên môi trường RViz bao gồm cả hướng của điểm đến. Với lựa chọn này Nav2 package sẽ giúp bạn tạo ra đường đi phù hợp cho robot. Bạn cũng có thể thay thế Nav2 package bằng một thuật toán xây dựng đường đi cho robot như RRT*, A*,… phù hợp với project của bạn. Sau khi thành công chọn điểm, đường đi của robot sẽ xuất hiện như đường chỉ màu hồng ở hình bên dưới đây.
https://flic.kr/p/2pMQtHo
https://flic.kr/p/2pMW58G
Cách tạo command line để di chuyển robot với Nav2
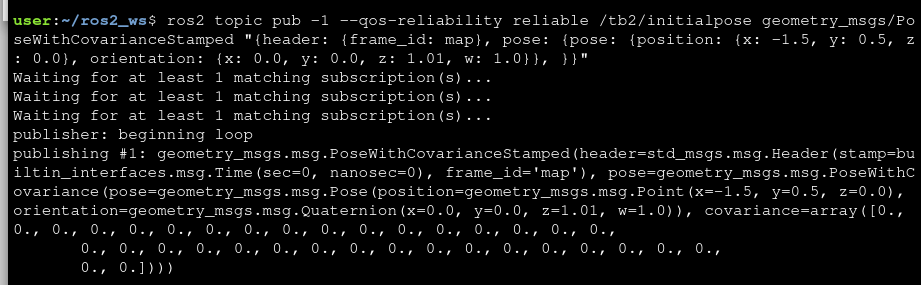
Bên cạnh đó, mình sẽ giới thiệu cho bạn một lựa chọn khác đó là thiết lập điểm xuất phát và điểm đến bằng câu lệnh thay vì chọn rviz. Với điểm khởi đầu bạn có thể khởi tạo bằng câu lệnh:
Những điều bạn cần lưu ý khi khởi tạo câu lệnh cho vị trí bắt đầu. Đầu tiên các bạn cần chọn robot nào để di chuyển, ở đây mình chọn robot 2 tương ứng với topic /tb2/initialpose sau đó là khai báo tọa độ của điểm với đầy đủ các thông tin như câu lệnh mình để trên.
Sau khi nhập câu lệnh thành công bạn sẽ thấy thông báo như hình bên dưới.
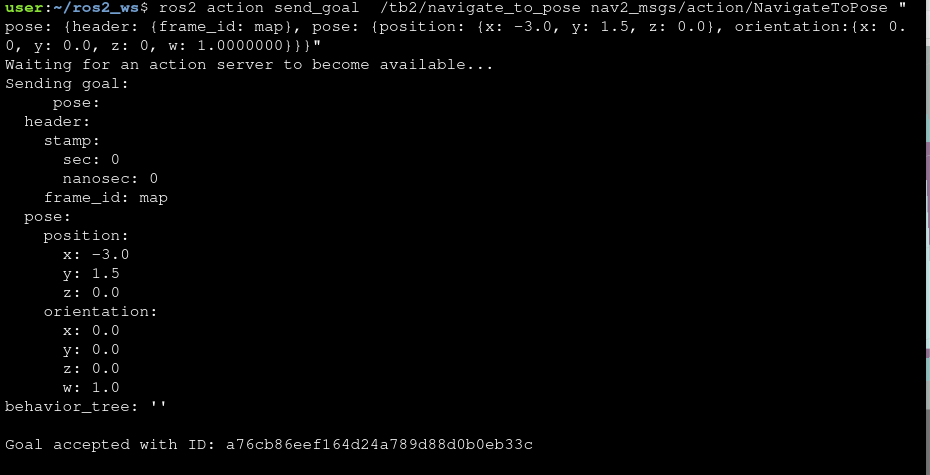
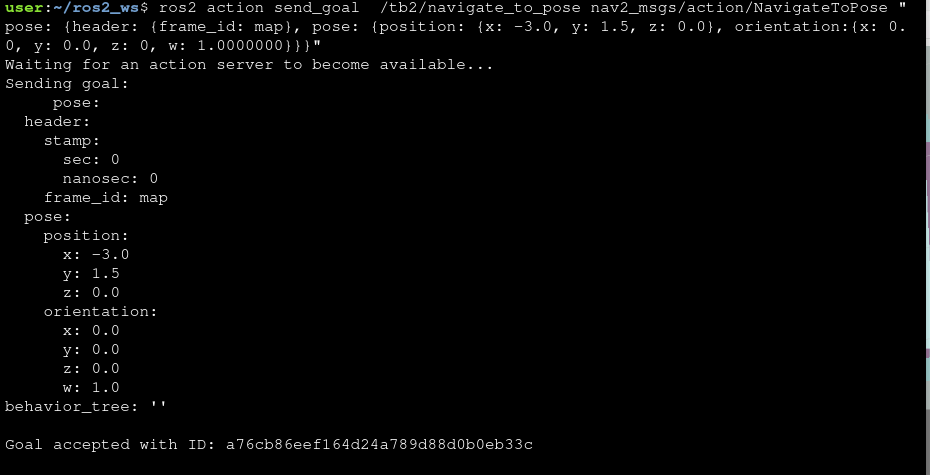
Tương tự như câu lệnh khởi tạo điểm xuất phát, điểm đến các bạn cũng cần khai báo đầy đủ thông tin và với cú pháp action send_goal . Một điều nữa bạn cần lưu ý là khi bạn chọn điểm kết thúc cho robot bạn cần phải cẩn thận tránh những điểm trùng với chướng ngại vật hoặc tọa độ mà robot không thể di chuyển tới được. Điều này là một trong những bất tiện khi các bạn sử dụng câu lệnh đòi hỏi bạn phải nắm rõ vị trí của robot. Nếu nhập sai bạn sẽ thấy thông báo như hình bên dưới.
https://flic.kr/p/2pMUUYV
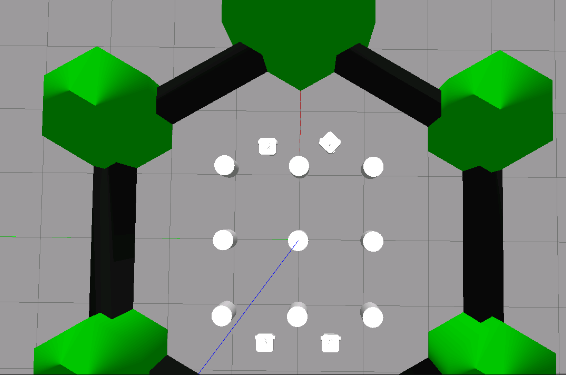
Còn đây là khi bạn nhập đúng câu lệnh, lúc này bạn sẽ thấy robot di chuyển không chỉ trong Gazebo mà còn ở Rviz.
https://flic.kr/p/2pMW58X
https://flic.kr/p/2pMWNPK
Đến đây là kết thúc phần 2 của blog này, với 2 phần tuy không dài nhưng các bạn cũng có thể biết được một số thông tin bổ ích với Navigation2. Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.
Nếu các bạn chưa biết cách tạo package trong ros2 như thế nào thì các bạn có thể xem lại video hướng dẫn tạo package của mình trước đây nhé.
Tạo một file subscriber
Tiếp theo, chúng ta sẽ tạo một file tên là simple_subscriber.py trong thư mục subscriber_pkg ở trong package subscriber_pkg mà chúng ta vừa tạo.
Tiếp theo, các bạn hãy copy những dòng code sau vào file simple_subscriber.py
import rclpy
# import the ROS2 python libraries
from rclpy.node import Node
# import the LaserScan module from sensor_msgs interface
from sensor_msgs.msg import LaserScan
# import Quality of Service library, to set the correct profile and reliability to read sensor data.
from rclpy.qos import ReliabilityPolicy, QoSProfile
class SimpleSubscriber(Node):
def __init__(self):
# Here you have the class constructor
# call super() in the constructor to initialize the Node object
# the parameter you pass is the node name
super().__init__('simple_subscriber')
# create the subscriber object
# in this case, the subscriptor will be subscribed on /scan topic with a queue size of 10 messages.
# use the LaserScan module for /scan topic
# send the received info to the listener_callback method.
self.subscriber = self.create_subscription(
LaserScan,
'/scan',
self.listener_callback,
QoSProfile(depth=10, reliability=ReliabilityPolicy.RELIABLE)) # is the most used to read LaserScan data and some sensor data.
def listener_callback(self, msg):
# print the log info in the terminal
self.get_logger().info('I receive: "%s"' % str(msg))
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
simple_subscriber = SimpleSubscriber()
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(simple_subscriber)
# Explicity destroy the node
simple_subscriber.destroy_node()
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
File simple_subscriber.py này chứa nội dung của một node subscriber đơn giản. Các bạn chưa cần hiểu những dòng code này, mình sẽ giải thích ở phần sau. Chúng ta sẽ tiếp tục các bước tiếp theo để chạy thử code xem nó làm được gì trước nhé.
Tạo file launch
Đầu tiên, chúng ta sẽ tạo một thư mục launch ở trong package subscriber_pkg đang làm việc bằng lệnh sau:
cd ~/ros2_ws/src/subscriber_pkg
mkdir launch
Tiếp theo, ta sẽ tạo một file launch tên là subscriber_pkg_launch_file.launch.py và chuyển nó sang chế độ executable để chạy node subscriber:
cd ~/ros2_ws/src/subscriber_pkg/launch
touch subscriber_pkg_launch_file.launch.py
chmod +x subscriber_pkg_launch_file.launch.py
Các bạn copy các dòng code sau vào trong file launch vừa mới tạo:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='subscriber_pkg',
executable='simple_subscriber',
output='screen'),
])
Chỉnh sửa file setup.py
Tiếp theo, các bạn hãy chỉnh sửa file setup.py để thiết lập các file vừa tạo với hệ thống package:
Nếu node hoạt động bình thường thì Terminal sẽ hiển thị nội dung message mà subscriber đọc được.
Giải thích code tạo subscriber
Quy trình hoạt động
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
simple_subscriber = SimpleSubscriber()
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin(simple_subscriber)
# Explicity destroy the node
simple_subscriber.destroy_node()
# shutdown the ROS communication
rclpy.shutdown()
Đầu tiên, hệ thống sẽ khởi tạo giao tiếp ROS2
rclpy.init(args=args)
Khai báo và khởi tạo node subscriber
simple_subscriber = SimpleSubscriber()
Tạm dừng việc thực thi chương trình, chờ yêu cầu hủy node (ctrl+c)
rclpy.spin(simple_subscriber)
Hủy node
simple_subscriber.destroy_node()
Tắt hệ thống giao tiếp ROS2
rclpy.shutdown()
Tạo class SimpleSubscriber
Phần code này cũng tương tự như khi tạo một class trong python thông thường với hàm khởi tạo __init__ và các hàm chức năng khác. Trong đó quan trọng nhất là các lệnh sau để thực hiện các chức năng liên quan tới ROS:
Khởi tạo một node có tên là 'simple_subscriber'
super().__init__('simple_subscriber')
Phần quan trọng nhất của code là mục tạo subscriber cho topic /scan sử dụng LaserScan message:
Ngoài ra, trong lệnh này chúng ta cũng thực hiện hai việc:
Khai báo hàm callback self.listener_callback cho subscriber. Mỗi lần subscriber này đọc được một message mới từ topic /scan thì hàm callback này sẽ được thực hiện. Hàm self.listener_callback trong node chúng ta tạo chỉ thực hiện một hành động đơn giản là in nội dung message mà subscriber đọc được ra Terminal.
Định nghĩa QoSProfile – Quality of Service của topic. Hiện tại thì các bạn chưa cần hiểu QoS là gì và chỉ cần biết rằng các thiết lập QoS của topic publisher và subscriber phải phù hợp với nhau. Nếu chúng không phù hợp thì giao tiếp giữa subscriber và puplisher sẽ không hoạt động.
Các bạn có thể xem QoSProfile của topic /scan bằng lệnh sau:
ros2 topic info /scan -v
Vậy là trong bài viết này mình đã hướng dẫn các bạn cách tạo một topic subscriber cơ bản và các bước chạy thử. Chúc các bạn thực hành thành công.
This tutorial is created by Robotics Ambassador Christian
Unit 1 Introduksyon sa Kurso
– Buod –
Tinatayang Oras na Kakailanganin: 30 minuto
Mabuhay!
Sa maikling gabay na ito, ating dadaluban kung ano nga ba ang mga ROS2 Messages at paano natin magagamit ang mga ito sa ating paggawa ng mga robots.
Bilang gabay sa mga tatalakayin ng proyektong ito, sila ay nakalista bilang mga sumusunod:
1. Introduksyon sa Kurso 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian 2. Pagpapahayag ng Konsepto ng ROS2 Messages 3. Praktikal na Halimbawa: Paggawa ng Sariling Message at Paggamit nito sa uganayang publisher-subscriber
– Dulo ng Buod –
Unit 1.1 Mga Pangangailangan sa Kurso at mga Sanggunian
Para sa kursong ito, tinataya ng may-akda na may kaalaman ka na sa pangunahing operasyong pang-terminal ng mga sistemang gumagana sa Ubuntu 22.04 LTS na OS at maging sa pangunahing nabigasyon and commands na ginagamit sa mga Linux terminals. Kung nais mo pang matuto ng mga programming fundamentals na kailangan para sa pag-aral ng ROS, mangyaring tumungo at tignan ang kursong Code Foundation for ROS Learning Path ng The Construct! Tiyak na matututunan mo ang lahat ng kailangan mong kaalaman upang masimulan mo na ang paggamit ng ROS!
At kung interesado ka na rin sa kung paano gumawa ng mga packages at nodes sa ROS2, mangyaring tignan mo na rin ang gabay na ito: How to Create Packages and Nodes in ROS2
Sa tutorial na ito, Gagamitin natin ang ROSject platform na handog ng TheConstruct! Subalit, kung nais niyong gumamit ng sariling virtual machine o computer, mangyaring gawing gabay ang OS-to-Distribution compatibilities na siyang ibinahagi ng opisyal na dokumentasyon ng ros.org para sa ROS2 Humble Hawksbill
* ROS2 Humble Hawksbill: PC o Virtual Machine na may Ubuntu 22.04 LTS
Unit 2: ROS2 Messages – Ano nga ba sila?
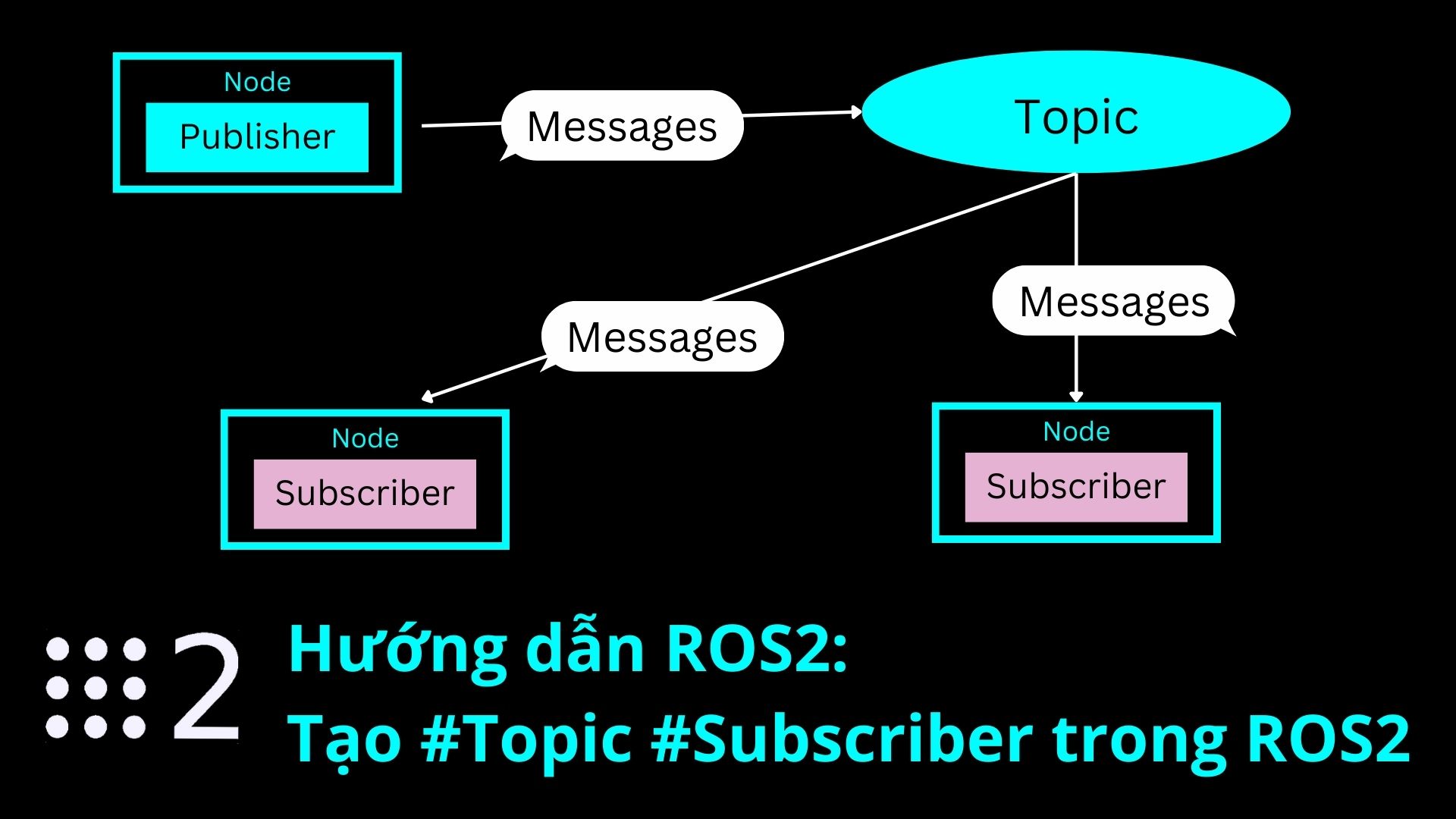
Sa kasalukuyan ay dapat pamilyar na tayo sa konsepto ng mga topics sa ROS2. Kung ating babalikan ang naging halimbawa noong nakaraan, ang mga ROS2 topics ay siyang mga nagsisilbing lagusan ng impormasyon kung saan maaari itong gamitin ng mga subscriber para mapatakbo ang isang feature ng robot. Ngayon naman’y ating dadaluban ang isa sa mga mahalagang aspeto ng mga ito at ito ang mga messages!
Sa ROS2, may tatlong pangunahing uri ng interface — ang messages, services, at actions. Sa gabay na ito, ating tatalakayin ang mga messages. Sa madaling salita, ang mga dokumentong ito ang siyang naglalaman ng mga variables na gagamitin ng ating robot o program hinggil sa pagpapagana ng naturang feature. Isang magandang halimbawa na nito ay ang Twist() message na gamit natin upang bigyan ng velocities and ating turtlesim.
Kung ating sisiyasatin ang laman ng Twist() message type, ito ang ating masisilayan: Vector3 linear Vector3 angular
At sa loob ng bawat Vector, ito naman ang laman nila:
Ibigsabihin nito ay mayroong tatlong posibleng velocities na pwedeng ipublish gamit ang message na ito. Ang mga linear velocities ay siyang tumutkoy sa paharap at palikod, pagilid, at pataas na galaw ng robot; habang ang mga angular naman ay tinatawag na pitch, yaw, at roll. Para sa mga groundbot, ang madalas gamitin na angular velocity ay ang yaw; habang para sa mga robot na panghimpapawid ay ginagamit ang anim na yan dahil mas marami ang kanilang Degrees of Freedom (DoF).
Ngayon, kung ating papansinin ang pagsulat ng mga messages sa ROS2, masasabi nating napakasimple ng kanilang istruktura. Ang tanging kailangan lamang na ilagay ay yung klase ng variable at yung pangalan nito — at hinggil naman sa pagpapangalan, dapat ay masimulan lamang ito sa kapital ng letra at ang file extension ay ‘.msg’.
<variable type> <variable name>
Ngayon at alam na natin kung ano sila, halina’t ating simulan ang paggawa at paggamit ng ating mga customized na ROS2 messages!
Unit 3: Paggawa ng Sariling Message at Paggamit nito sa Uganayang Publisher-Subscriber
Bilang panimula, tayo muna ay gumawa ng ating Workspaces folder na siyang maglalaman ng lahat ng ating workspace para sa ROS2.
# Sa Terminal 1
user:~$ mkdir Workspaces
Matapos niyan ay gumawa tayo ng workspace na ating papangalanang sample_ws. Mangyaring patakbuhin na rin ang ‘colcon build’ pagkatapos sa loob nito.
# Sa Terminal 1
user:~/Workspaces$ mkdir sample_ws
user:~/Workspaces$ colcon build
Para sa gabay na ito, gagawa tayo ng dalawang packages — una ay ating tatawaging ‘my_interface_pkg’ na siyang maglalaman ng ating custom message at ang isa naman ay ating tatawagin ‘use_custom_interface_pkg’ kung saan natin gagawin ang mga publisher at subscriber na gagamit ng ating nagawang interface.
Ngayon ay ating unahin muna ang ‘my_interface_pkg’
# Sa Terminal 1
user:~/Workspaces$ cd sample_ws
user:~/Workspaces/sample_ws$ mkdir src
user:~/Workspaces/sample_ws$ cd src
user:~/Workspaces/sample_ws/src$ ros2 pkg create my_interface_pkg --build-type ament_cmake --dependencies std_msgs rclcpp
Isang mahalagang konseptong alalahanin ay sa tuwing gagawa ng package para sa mga interfaces ay dapat na ament_cmake ang build type ng mga ito at nakadepende sa rclcpp. Subalit para sa paggawa ng nodes ay malaya tayong pumili kung nais nating gumamit ng python o cpp na environment.
Kasunod ng paggawa ng package ay gumawa tayo ng folder na ating papangalanang ‘msg’ sa loob ng my_interface_pkg. Mula rito ay gumawa na rin tayo ng ating message file na ating papangalanang ‘Numbers.msg’
# Sa Terminal 1
user:~/Workspaces/sample_ws/src$ cd my_interface_pkg
user:~/Workspaces/sample_ws/src/my_interface_pkg$ mkdir msg
user:~/Workspaces/sample_ws/src/my_interface_pkg$ cd msg
user:~/Workspaces/sample_ws/src/my_interface_pkg/msg$ touch Numbers.msg
Mangyaring kopyahin ang naturang code sa ilalim na siyang magiging laman ng Numbers.msg
int32 a
int32 b
Tumungo sa CMakeList.txt na file at idagdag ang sumusunod na mga linya:
cmake_minimum_required(VERSION 3.8)
project(my_interface_pkg)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(std_msgs REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rosidl_default_generators REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Numbers.msg"
)
ament_package()
Ngayon naman ay tumungo sa package.xml at idagdag ang mga sumusunod na sipi ng code:
Siguraduhing na-save ang lahat ng mga file at i-compile ang naturang package
# Terminal 1
user:~/Workspaces/sample_ws/src/my_interface_pkg/msg$ cd ../../../
user:~/Workspaces/sample_ws$ colcon build
Ngayon naman ay tumungo tayo sa paggawa ng publisher at subscriber na gagamit ng ating custom message.
Una, gumawa ng python package na ating papangalanang ‘use_custom_interface_pkg’
# Sa Terminal 1
user:~/Workspaces/sample_ws$ cd src
user:~/Workspaces/sample_ws/src$ ros2 pkg create use_custom_interface_pkg --build-type ament_python --dependencies rclpy std_msgs geometry_msgs my_interface_pkg
Para sa ating mga codes, atin itong ilalagay sa loob ng /use_custom_interface_pkg/use_custom_interface_pkg na directory at papangalanan natin ang publisher at subscriber bilang sumusunod:
Matapos i-code ang mga ito, mangyaring muling i-compile ang kabuuan ng ‘sample_ws’. At ngayon, atin nang patakbuhin ang ating mga nagawang node na gumagamit ng ating custom message!
# Sa Terminal 1
user:~/Workspaces/sample_ws/src/use_custom_interface_pkg/cd use_custom_interface_pkg$ cd ../../../
user:~/Workspaces/sample_ws$ colcon build
Para sa bahaging ito, i-source ang terminal 2 and 3 para sa sample_ws
# Sa Terminal 2 at 3
user:~$ cd Workspaces/sample_ws
user:~/Workspaces/sample_ws$ source install/setup.bash
Patakbuhin ang publisher at subscriber sa Terminal 2 at 3
# Sa Terminal 2
user:~/Workspaces/sample_ws$ ros2 run use_custom_interface_pkg custom_publisher
# Sa Terminal 3
user:~/Workspaces/sample_ws$ ros2 run use_custom_interface_pkg custom_subscriber
Ganito dapat ang lalabas sa iyong pagpapatakbo:
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=3, b=8, sum=11
[INFO] [1711264604.204593546] [custom_subscriber]: Received Numbers: a=3, b=5, sum=8
[INFO] [1711264604.187348953] [custom_subscriber]: Received Numbers: a=2, b=3, sum=5
[INFO] [1711264604.237378829] [custom_subscriber]: Received Numbers: a=4, b=4, sum=8
[INFO] [1711264604.142367827] [custom_subscriber]: Received Numbers: a=1, b=6, sum=7
...
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=7, b=9, sum=16
[INFO] [1711264604.204593355] [custom_subscriber]: Received Numbers: a=3, b=1, sum=4
At ayan!
Matagumpay nating nagawa ang ating custom message sa ROS2 at magamit ang mga ito sa publisher at subscriber! Kapag tapos ka nang magsiyasat, maaarin mong pindutin ang “ctrl + c” upang patayin na ang naturang node at maging ang simulation. At diyan nagtatapos ang ating maikling gabay hinggil sa paggawa ng custom messages! Nawa’y may natutunan kayong bago na makatutulong sa inyong pag-aaral ng ROS!
Para sa iba pang mga ROSject na tulad nito, mangyaring bisitahin ang The Construct. Nag-aalok sila ng napakaraming praktikal na mga gabay sa ROS mula sa mga payak hanggang sa mga konseptong pangbihasa na!
Hanggang sa muli! Ito si Christian C. Anabeza, ang inyong Filipino ROSbotics Ambassador!
This tutorial is created by Robotics Ambassador Eric
Những điều bạn sẽ được biết trong blog này:
Cách cài đặt các packages cần thiết để mô phỏng nhiều robots ở ROS2 Humble
Cách tạo launch file để mô phỏng nhiều robot trên gazebo
Mô phỏng robots trên Rviz và gazebo
Phần 2: https://www.theconstruct.ai/lam-sao-de-mo-phong-nhieu-robot-su-dung-nav2-trong-khong-gian-gazebo-voi-ros2-humble-phan-2-vietnamese-ros2-tutorial/
Khi làm việc với dự án yêu cầu bạn phải kết hợp nhiều robots với nhau để thực hiện một nhiệm vụ nào đó, vấn đề đầu tiên đặt ra là làm sao để có thể mô phỏng được nhiều robot trên một môi trường cụ thể. Do đó, blog này sẽ giúp bạn biết cách thực hiện điều đó. Đây sẽ là phần 1 của blog này với mong muốn sẽ giúp cho các bạn biết cách tạo một launch file để tích hợp nhiều robots và mô phỏng chúng trên Gazebo cùng với Rviz. Tiếp theo đó sẽ là phần 2 sẽ hướng dẫn các bạn sử dụng Nav2 package cùng với nhiều robot trong môi trường Gazebo.
Khởi động rosject
Như mọi lần rosject sẽ là công cụ hoàn hảo cho việc thực hiện project này, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2pGt7Ge
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Cài đặt các package cần thiết
Đầu tiên các bạn cần cài đặt các package cần thiết để có thể thực hiện project này, sau khi vào môi trường làm việc catkin là ros2_ws các bạn làm theo bằng cách thực hiện các câu lệnh sau đây:
Sau bước này thì các bạn sẽ nhìn thấy thông báo cài đặt thành công như hình bên dưới.
https://flic.kr/p/2pGmTxi
Tiếp theo sử dụng câu lệnh sau để build môi trường catkin
colcon build --symlink-install
source ./install/setup.bash
https://flic.kr/p/2pGrq9K
Sau khi tải thành công các bạn sẽ nhìn thấy folder turtlebot3_multi_robot trong src. ở đây sẽ bao gồm các file cần thiết cho project này. Tiếp theo chúng ta sẽ đến mô phỏng và đi sâu vào làm sao để tạo được launch file.
https://flic.kr/p/2pGtH5J
Mô phỏng trên Gazebo cùng nhiều robots
Thông thường khi làm việc với turtlebot3 các bạn luôn phải chọn mô hình robot và truy xuất môi trường cũng như đường dẫn đến package. Tuy nhiên, trong blog này thay vì phải command mỗi lần chạy chương trình. Mình sẽ hướng dẫn các bạn cách khai báo trong launch file để chương trình tự động thực hiện cài đặt.
https://flic.kr/p/2pGtH6f
Sau đó để sử dụng môi trường gazebo và robot, bạn cần truy xuất môi trường gazebo và chạy ros launch package:
Vì chúng ta sẽ mô phỏng không chỉ một mà nhiều robot cùng một lúc nên khi thực hiện câu lệnh chương trình cần một lúc để xử lý được yêu cầu nên các bạn kiên nhẫn nhé.
https://flic.kr/p/2pGmTxy
Mô phỏng trên RViz cùng nhiều robots
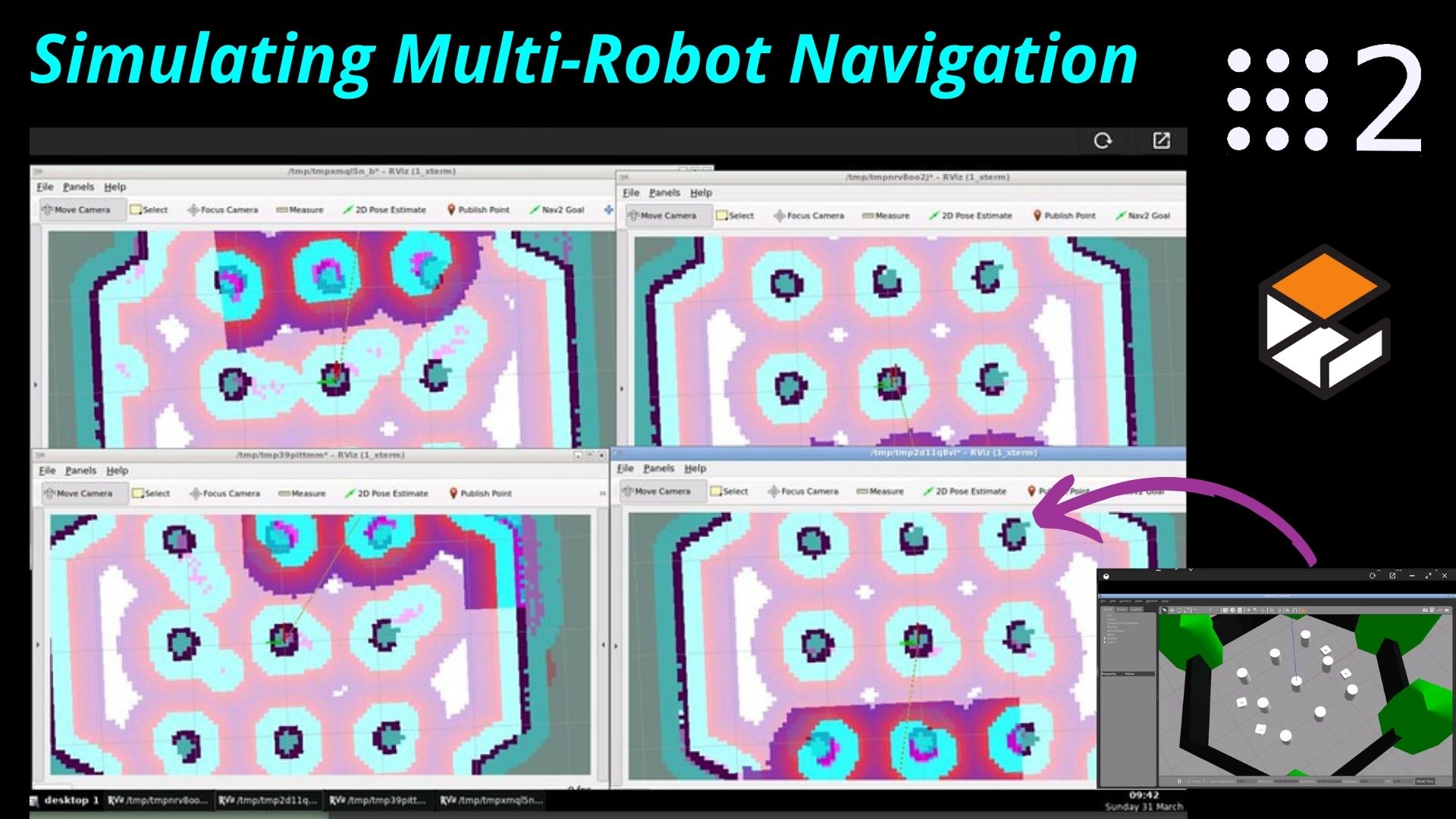
Khi thực hiện ros launch ở trên, 4 cửa sổ Rviz tương ứng với mỗi robot cũng sẽ xuất hiện đồng thời như hifnh dưới. Mỗi cửa sổ đại diện cho một robot.
https://flic.kr/p/2pGst9h
Bên cạnh đó, nếu các bạn kiểm tra ros topic thì các bạn sẽ thấy đầy đủ đồng thời tất cả topic của robot được khai báo (tb1, tb2, tb3, tb4). Từ đây chúng ta có thể áp dụng vào nhiều project sử dụng nhiều robots cùng lúc.
source ~/ros2_ws/install/setup.bash
ros2 topic list
https://flic.kr/p/2pGmTyf
https://flic.kr/p/2pGtH7h
https://flic.kr/p/2pGt7Hw
https://flic.kr/p/2pGtH7C
Cách tạo launch file để mô phỏng nhiều robots cùng lúc
Sau đây, mình sẽ giải thích các phần trong launch file để các bạn tùy ý có thể thay đổi và thực hiện project cho riêng mình.
1. Khởi tạo Gazebo server và client ¶
Để có thể chạy mô phỏng trên Gazebo chúng ta cần khai báo và khởi tạo Gazebo server và client như sau
Khi mô phỏng trên gazebo, chúng ta cần biết vị trí cần bố trí robot hay nói cách khác chúng ta cần khởi tạo tọa độ cho robot trên môi trường gazebo. Để làm việc đó, cách tiếp cận đơn giản là sử dụng hàng và cột để xác định vị trí theo dạng lưới. Với mỗi vị trí trên lưới, nó sẽ tạo ra một tên và không gian duy nhất cho từng robot. Sau đó, tạo và cấu hình nút robot_state_publisher và spawn_entity.py để xuất hiện robot trong gazebo.
Cách sắp xếp tuần tự với trình xử lý sự kiện (Event Handlers)
Chúng ta sửu dụng phương pháp tuần tự để robot xuất hiện, đảm bảo rằng mỗi robot được hoàn toàn trang bị trước khi đến với robot tiếp theo. Điều này được thực hiện thông qua hai chức năng RegisterEventHandler và OnProcessExit để chờ quá trình trước đó được hoàn thành.
Sau khi các robots được hoàn toàn khởi tạo, chúng ta có thể bắt đầu đùng các nút để điều khiển robot dựa trên enable_drive, cho phép điều khiển chuyển động của robots trong môi trường mô phỏng
Đến đây là kết thúc phần 1 của blog này, các bạn có thể theo doxi phần 2 để kết hợp nhiều robots cùng với Nav2 package. Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.