In the last years, unit testing has become more popular in a lot of programming languages. It’s a very useful practice to any kind of program or project. The problem is “How do I start testing?”. If you have already a project that has not being tested from it’s beginning, it becomes hard to start, but not impossible!
Unit testing requires some practices from the developer. If you want to follow the TDD (Test Driven Development), you have to create your tests before coding the logic of your functions and methods. Unit testing is a way to test small parts of a project, in order to help you integrating all of them, or even understand why the whole project is not working the way you expected.
In this post, you’ll see a simple example of unit testing using C++, for a very simple ROS Package. The logic itself is not meaningful in a robotic application, but the configuration of the class and the unit testing is valuable for using in other projects. So, let’s start!
Are you having problems to make your robot navigate because of the kind of data you have to treat? It’s very common to get stuck when we have to work with quaternions, instead of RPY angles. Quaternions are used in robotics to represent the rotation, in 3 axis, of a rigid body in respect with a coordinate frame. But sometimes it’s too much for what we want to do.
In this post, we are going to see how to get only the necessary data from a quaternion for a 2D application. It is very helpful, since robotics algorithms works with quaternions, but user’s interface, RPY angles.
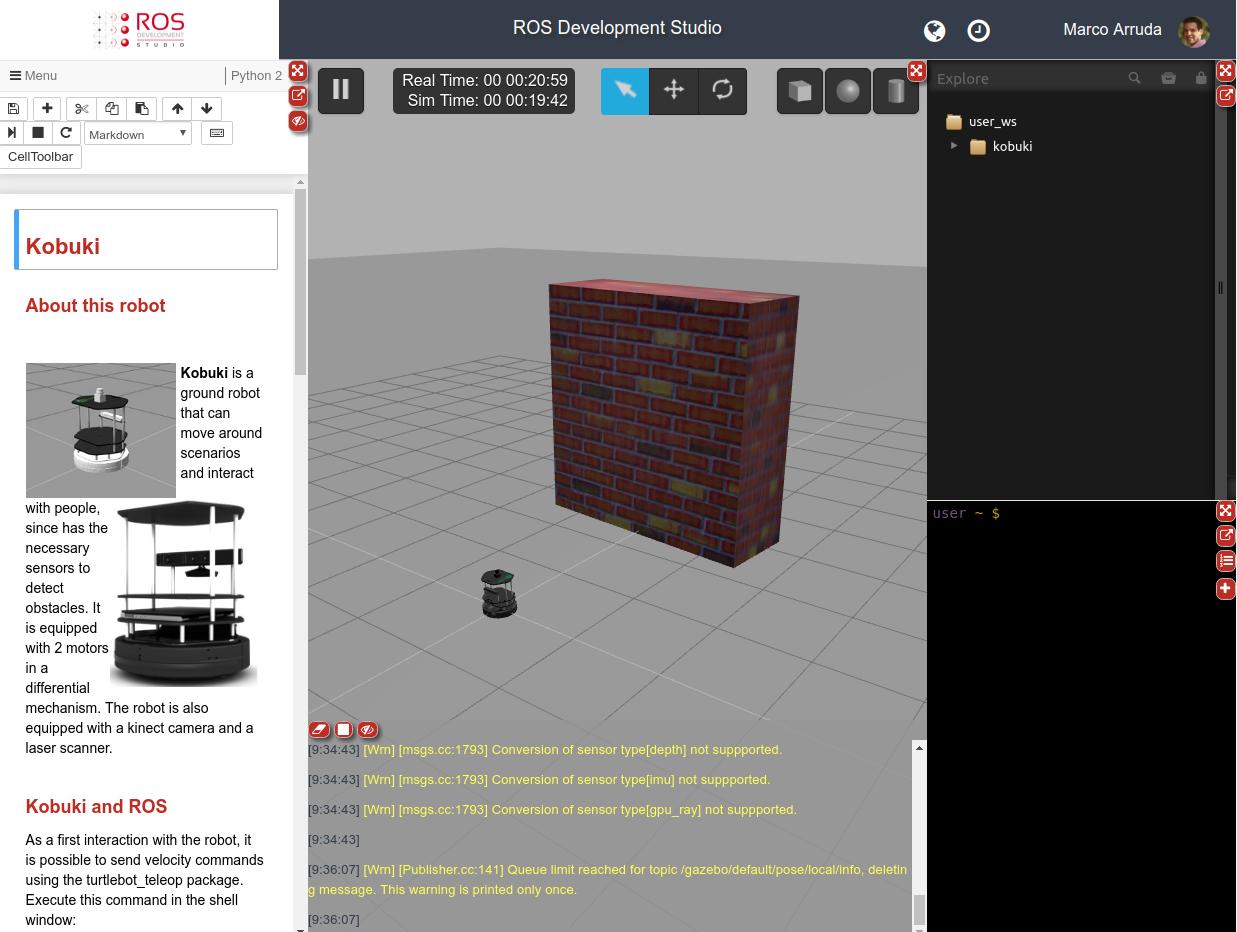
Let’s start with a robot, to make it clear. In this post, we are going to use the Turtlebot simulation, available in ROS Development Studio (RDS).
Turtlebot Simulation
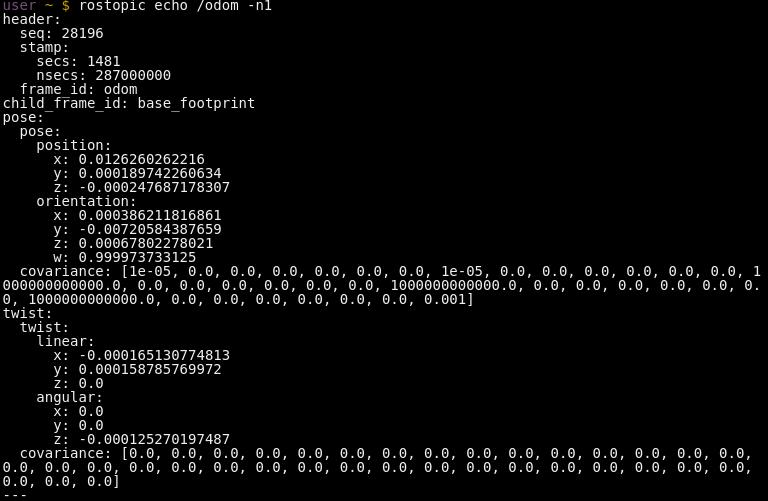
We have provided by the robot sensors a /odom topic, which publishes messages of the nav_msgs/Odometry type. See below a single message example:
Odometry message
Now, unless you have a path described using quaternions, we need to convert this quaternion to RPY. To do the following, we will use the TF library. In the image below, you can see the program in charge of this task:
First, we are creating a node and subscribing the /odom topic. In the callback of this subscriber, we are getting the information that matters for us, which are the X, Y and Yaw data. To have the Yaw angle, we are using the quaternion data and converting to RPY (We need a Matrix3x3 object in the middle process). Since our robot has only three degrees of freedom (linear in X and Y, angular in Z), we are not considering Roll and Pitch, the Pose2D message type is enough for us. This is a simplification for a ground robot navigating in a planar scenario.