Trước khi đi vào nội dung chính, nếu bạn nào chưa biết Service trong ROS2 là gì thì mình khuyên các bạn nên ghé qua video mình hướng dẫn các câu lệnh cơ bản với Dịch vụ trong ROS2 trước ở link này nhé:
1. Tạo một package
Đầu tiên, chúng ta sẽ tạo một package chứa code của Client cần tạo.
Tạo một package mới tên là client_pkg trong thư mục ~/ros2_ws/src bằng các lệnh sau:
Chúng ta sẽ cần package std_srvs để giao tiếp với các Dịch vụ /moving và /stop như trong video trước mình đã hướng dẫn.
2. Tạo một tệp chứa nội dung code của Client
Tiếp theo, trong thư mục client_pkg của package vừa tạo, ta sẽ tạo một tệp mới tên là service_client.py chứa phần code chính của Service Client mà chúng ta muốn tạo. Các bạn hãy copy nội dung phần code sau vào trong file service_client.py vừa tạo:
# import the empty module from std_servs Service interface
from std_srvs.srv import Empty
# import the ROS2 Python client libraries
import rclpy
from rclpy.node import Node
class ClientAsync(Node):
def __init__(self):
# Here you have the class constructor
# call the class constructor to initialize the node as service_client
super().__init__('service_client')
# create the Service Client object
# defines the name and type of the Service Server you will work with.
self.client = self.create_client(Empty, 'moving')
# checks once per second if a Service matching the type and name of the Client is available.
while not self.client.wait_for_service(timeout_sec=1.0):
# if it is not available, a message is displayed
self.get_logger().info('service not available, waiting again...')
# create an Empty request
self.req = Empty.Request()
def send_request(self):
# send the request
self.future = self.client.call_async(self.req)
def main(args=None):
# initialize the ROS communication
rclpy.init(args=args)
# declare the node constructor
client = ClientAsync()
# run the send_request() method
client.send_request()
while rclpy.ok():
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin_once(client)
if client.future.done():
try:
# checks the future for a response from the Service
# while the system is running.
# If the Service has sent a response, the result will be written
# to a log message.
response = client.future.result()
except Exception as e:
# Display the message on the console
client.get_logger().info(
'Service call failed %r' % (e,))
else:
# Display the message on the console
client.get_logger().info(
'the robot is moving' )
break
client.destroy_node()
# shutdown the ROS communication
rclpy.shutdown()
if __name__ == '__main__':
main()
Mình sẽ giải thích qua đoạn code này nhé. Phần code trong file này cũng đi theo cấu trúc chung của một node trong ROS2. Ở trong hàm main(), sau khi khởi tạo ROS2, chương trình sẽ khai báo object ClientAsync() mà chúng ta đã định nghĩa ở phần trên. Trong phần constructor của class ClientAsync(), lệnh để tạo Client là:
self.client = self.create_client(Empty, 'moving')
Lệnh này sẽ tạo một Client sử dụng kiểu dữ liệu Empty và kết nối tới một Service tên là /moving.
Tiếp theo, vòng lặp while được sử dụng để đảm bảo rằng Service Server (/moving ) đang hoạt động.
while not self.client.wait_for_service(timeout_sec=1.0):
Quay trở lại với hàm main(). Sau khi khởi tạo xong, yêu cầu sẽ được gửi tới server bằng hàmsend_request(). Hàm này rất quan trọng và có nội dung là:
self.future = self.client.call_async(self.req)
Câu lệnh này sẽ gửi một yêu cầu không đồng bộ (asynchronous request) tới Service Server bằng hàm call_async(). Sau đó, lưu phản hồi từ Server về biến self.future. Biến này cũng rất quan trọng. Sau khi tạo yêu cầu, Server sẽ ngay lập tức trả về future cho biết việc gọi và phản hồi được thực hiện (nhưng nó không chứa nội dung của phản hồi).
Cuối cùng, trong hàm main() là vòng lặp while:
while rclpy.ok():
# pause the program execution, waits for a request to kill the node (ctrl+c)
rclpy.spin_once(client)
if client.future.done():
try:
# checks the future for a response from the Service
# while the system is running.
# If the Service has sent a response, the result will be written
# to a log message.
response = client.future.result()
except Exception as e:
# Display the message on the console
client.get_logger().info(
'Service call failed %r' % (e,))
else:
# Display the message on the console
client.get_logger().info(
'the robot is moving' )
break
Khi chương trình đang chạy (rclpy.ok()), nó sẽ liên tục kiểm tra xem phản hồi từ dịch vụ đã hoàn thành hay chưa:
if client.future.done():
Nếu nó đã hoàn thành thì chương trình sẽ nhận được giá trị của phản hồi từ Server:
response = client.future.result()
Trong trường hợp này, vì chúng ta đang làm việc với một phản hồi kiểu Empty nên chúng ta sẽ không làm gì cả.
Trong khi đợi phản hồi hoàn thành của Dịch vụ, chương trình sẽ in ra các thông tin vào nhật ký node bằng lệnh:
client.get_logger().info('the robot is moving' )
Và cuối cùng phải kể đến dòng lệnh sau:
rclpy.spin_once(client)
Dòng lệnh này tương tự như lệnh rclpy.spin() nhưng chỉ quay vòng node đó một lần.
3. Tạo một tệp launch
Tiếp theo, chúng ta sẽ tạo một file launch để khởi tạo client này.
Tạo một file launch tên là service_client_launch_file.launch.py bằng các lệnh sau:
cd ~/ros2_ws/src/client_pkg
mkdir launch
cd launch
touch service_client_launch_file.launch.py
chmod +x service_client_launch_file.launch.py
Mở file launch vừa tạo và thêm những dòng sau vào:
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package='client_pkg',
executable='service_client',
output='screen'),
])
4. Sửa tệp setup.py
Sau khi tạo xong file launch, chúng ta sẽ thêm một số dòng code vào file setup.py để cài đặt tệp launch mà chúng ta vừa mới tạo và thêm entry points vào executable cho script service_client.py
Sau khi dòng code này chạy, chúng ta sẽ thấy robot bắt đầu di chuyển ngẫu nhiên. Điều này chứng tỏ Service Server /moving đã nhận được yêu cầu từ Client và thực hiện yêu cầu đó.
Neste tutorial, vamos aprender a criar serviços personalizados no ROS2 e desenvolver um pacote de controle de movimento para um robô. Vamos passar pelos passos de criação e configuração de serviços, desenvolvimento de um pacote de movimento, implementação do servidor e cliente de serviço, e a criação de arquivos de lançamento. Este tutorial é ideal para quem deseja aprimorar suas habilidades em ROS2 e programação robótica.
Abrindo o rosject
Clique no link abaixo para ter acesso ao rosject deste tutorial. Em seguida, clique no botão “RUN”.
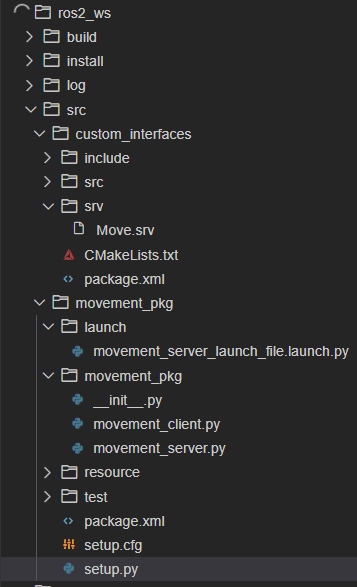
Primeiro, vamos criar um pacote de interfaces personalizadas que conterá nosso serviço. Este pacote será responsável por definir e gerenciar a interface do serviço que iremos usar para controlar o robô.
Copie este bloco de comandos no primeiro terminal:
Esses comandos criam um novo pacote chamado custom_interfaces com as dependências rclcpp e std_msgs.
Definição do Serviço
Em seguida, vamos definir o serviço que será utilizado para controlar o robô. Para isso, crie uma pasta chamada srv dentro do pacote custom_interfaces e um arquivo Move.srv. Use os comandos:
cd ~/ros2_ws/src/custom_interfaces
mkdir srv
cd srv
touch Move.srv
Edite o arquivo Move.srv com o seguinte conteúdo:
string direction # Direção para girar (direita ou esquerda)
float64 velocity # Velocidade angular (em rad/s) ou linear (em m/s)
int32 time # Duração do giro (em segundos)
---
bool success # O comando foi bem-sucedido?
Esse arquivo define a estrutura do serviço. Ele recebe a direção, velocidade e tempo como entrada, e retorna um booleano indicando se a operação foi bem-sucedida.
Atualizando os Arquivos CMakeLists.txt e package.xml
Agora, precisamos configurar os arquivos CMakeLists.txt e package.xml para que o ROS2 possa construir e utilizar nosso serviço.
source ~/ros2_ws/install/setup.bash
ros2 run movement_pkg movement_client left 0.2 5
No segundo terminal você verá:
Enquanto no primeiro terminal aparecerá:
Isso indica que o serviço foi realizado corretamente.
Na janela do Gazebo, você pode ver o robô se movimentando pelo ambiente.
<figure7>
Outras opções, além de left, são right, forward, backward. Experimente mudar os parametros do comando anterior variando também a velocidade e a duraçao do movimento do robô (respectivamente segundo e terceiro parametros do comando).
Conclusão
Esperamos que este tutorial tenha sido útil e que você tenha aprendido como criar serviços personalizados no ROS2 e controlar o movimento de um robô. Se você gostou deste conteúdo, considere explorar mais recursos do ROS2 e experimentar novas possibilidades para expandir suas habilidades em robótica.
Vídeo no YouTube
Este foi o post de hoje. Lembre-se que nós temos uma versão deste post em vídeo no YouTube.
Se você gostou do conteúdo, por favor, considere se inscrever no nosso canal do YouTube. Estamos publicando novos conteúdos quase todos os dias.
Parameters in ROS 2 are associated with individual nodes, it is not possible to work with another node’s parameters simply by using the Node API. For example, a node calling get_parameter() can only get its own parameters.
In this tutorial, you’ll learn how to get and set another node’s parameters by using a service call in code. All other parameter services should be straightforward as they are similar.
If you want to learn more advanced ROS 2 topics, including parameters and more, in a practical, hands-on way, check out the course Intermediate ROS 2: https://app.theconstruct.ai/courses/113
Opening the rosject
In order to follow this tutorial, we need to have ROS 2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject for that: https://app.theconstruct.ai/l/639b9a55/
Just by copying the rosject (clicking the link above), you will have a setup already prepared for you.
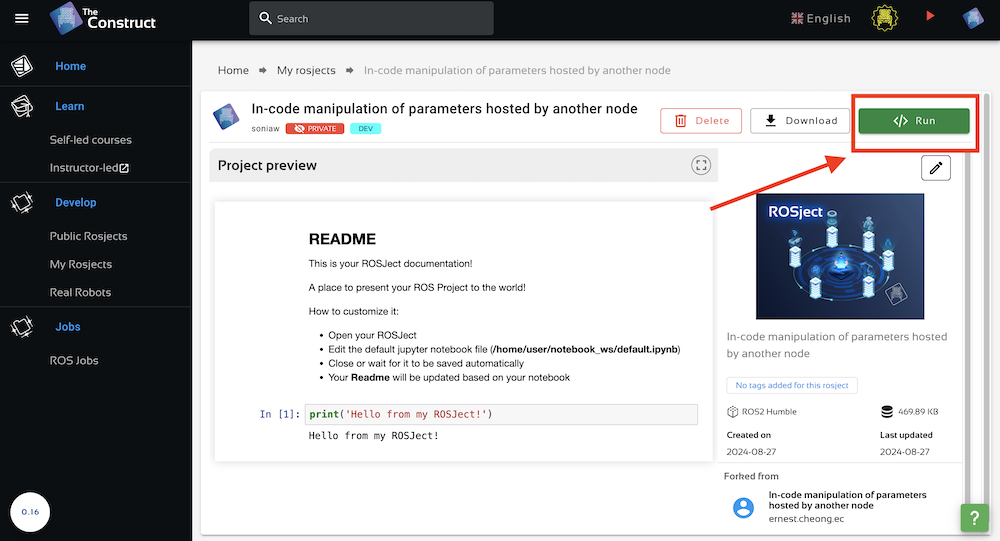
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject.
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
In order to interact with ROS2, we need a terminal.
Let’s open a terminal by clicking the Open a new terminal button.
Create a ROS2 python package with a simple node that has two parameters
In a terminal, create a python package called python_parameters:
cd ~/ros2_ws/src/
ros2 pkg create --build-type ament_python python_parameters --dependencies rclpy
In the same terminal, create a python node called python_parameters_node.py:
cd ~/ros2_ws/
colcon build --packages-select python_parameters
Then start the node:
source ~/ros2_ws/install/setup.bash
ros2 run python_parameters minimal_param_node
You should get something like this:
[INFO] [1713695285.349594469] [minimal_param_node]: I am me!
[INFO] [1713695285.349875641] [minimal_param_node]: You are you!
[INFO] [1713695286.337758113] [minimal_param_node]: I am me!
[INFO] [1713695286.338776447] [minimal_param_node]: You are you!
[INFO] [1713695287.337323765] [minimal_param_node]: I am me!
[INFO] [1713695287.338010397] [minimal_param_node]: You are you!
Create a simple client node that retrieves another node’s parameters
The goal is to get the parameter values of the node that we just created in the previous section (python_parameters_node.py) from within a new client node.
Create a new Python file for the client node called get_parameters_client_node.py:
Here is a simple asynchronous client (to paste in get_parameters_client_node.py):
It creates a client with service type GetParameters and service name /minimal_param_node/get_parameters
The request message needs to be a list of names of parameters whose values we want to get. In this case, we chose to retrieve the values of both my_parameter and your_parameter
Remember that we can use the terminal command ros2 interface show rcl_interfaces/srv/GetParameters to determine the request (and response) fields
The send_request method is passed the request message and handles the service call
import rclpy
from rclpy.node import Node
from rcl_interfaces.srv import GetParameters
class MinimalGetParamClientAsync(Node):
def __init__(self):
super().__init__('minimal_get_param_client_async')
self.cli = self.create_client(GetParameters, '/minimal_param_node/get_parameters')
while not self.cli.wait_for_service(timeout_sec=1.0):
self.get_logger().info('service not available, waiting again...')
self.req = GetParameters.Request()
def send_request(self, params_name_list):
self.req.names = params_name_list
self.future = self.cli.call_async(self.req)
rclpy.spin_until_future_complete(self, self.future)
return self.future.result()
def main():
rclpy.init()
minimal_get_param_client = MinimalGetParamClientAsync()
list_of_params_to_get = ['my_parameter', 'your_parameter']
response = minimal_get_param_client.send_request(list_of_params_to_get)
minimal_get_param_client.get_logger().info('First value: %s, Second value: %s' % (response.values[0].string_value, response.values[1].string_value))
minimal_get_param_client.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Add the entry point to the setup.py file so that it looks like this:
cd ~/ros2_ws/
colcon build --packages-select python_parameters
Run the client node in one terminal:
source ~/ros2_ws/install/setup.bash
ros2 run python_parameters minimal_get_param_client_async
And the service node in a different terminal:
source ~/ros2_ws/install/setup.bash
ros2 run python_parameters minimal_param_node
You should get something like this in the terminal of the client:
[INFO] [1719039475.331557220] [minimal_get_param_client_async]: service not available, waiting again...
[INFO] [1719039476.333952497] [minimal_get_param_client_async]: service not available, waiting again...
[INFO] [1719039477.336702012] [minimal_get_param_client_async]: service not available, waiting again...
[INFO] [1719039478.338849982] [minimal_get_param_client_async]: service not available, waiting again...
[INFO] [1719039478.591154332] [minimal_get_param_client_async]: First value: me, Second value: you
...
Since the client was started first, it was initially waiting for the GetParameters service to be available. After the service started, the client successfully retrieved the parameter values before shutting down.
End all terminal processes before continuing.
Create a simple client node that modifies another node’s parameters
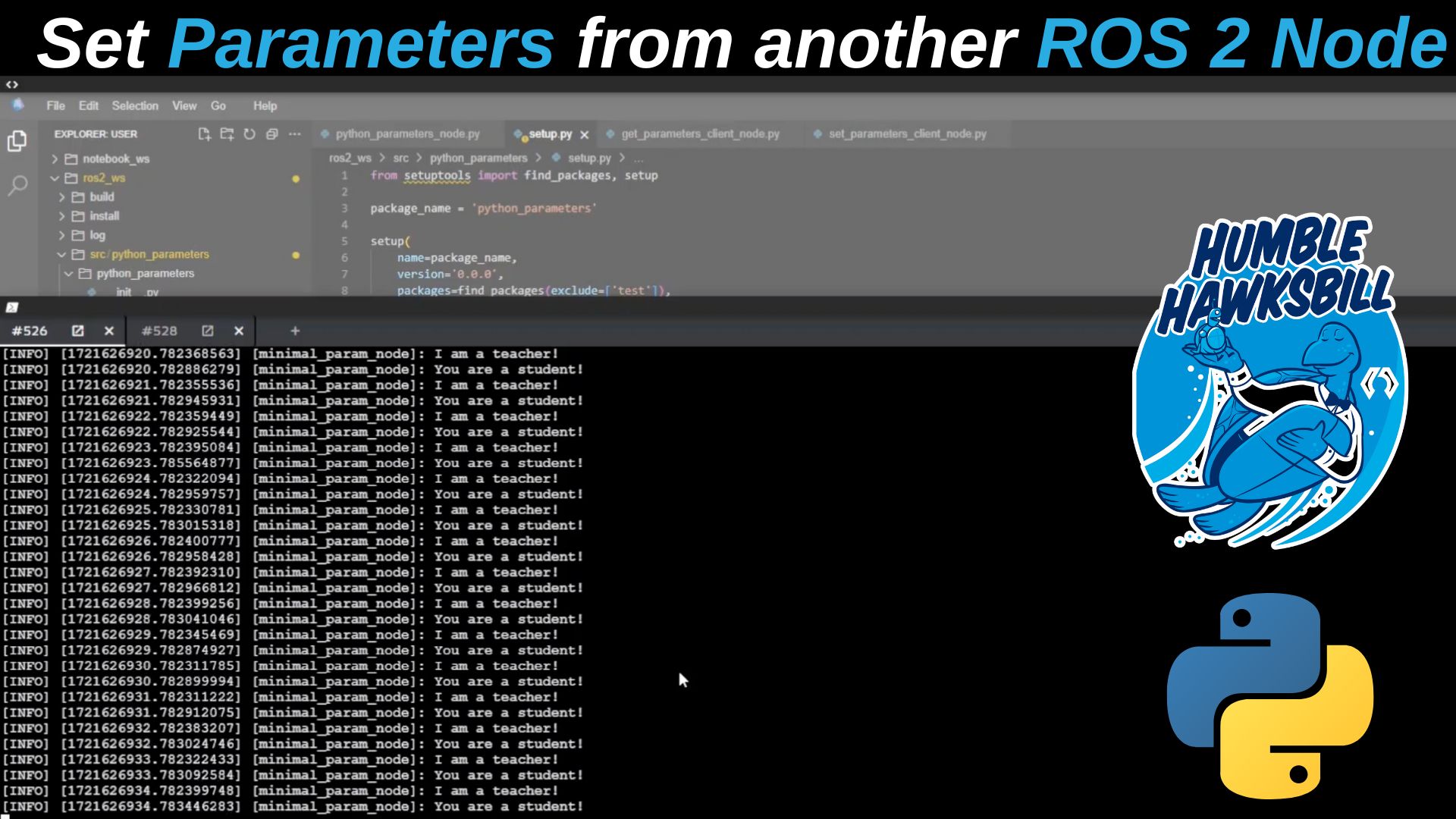
The process here is similar to the previous section, only this time we are setting the parameter values.
Create a new Python file for the client node called set_parameters_client_node.py:
[INFO] [1719045085.623969364] [minimal_param_node]: You are you!
[INFO] [1719045086.613542065] [minimal_param_node]: I am me!
[INFO] [1719045086.614106714] [minimal_param_node]: You are you!
[INFO] [1719045087.613402451] [minimal_param_node]: I am me!
[INFO] [1719045087.613898409] [minimal_param_node]: You are you!
[INFO] [1719045088.613406942] [minimal_param_node]: I am a teacher!
[INFO] [1719045088.613964772] [minimal_param_node]: You are a student!
[INFO] [1719045088.613406942] [minimal_param_node]: I am a teacher!
[INFO] [1719045088.613964772] [minimal_param_node]: You are a student!
...
ROS2 (Robot Operating System version 2) is becoming the de facto standard “framework” for programming robots.
In this post, we are going to learn how to combine a Publisher, a Subscriber, and a Service in the same ROS2 Node.
ROS Inside!
ROS Inside
Before anything else, if you want to use the logo above on your own robot or computer, feel free to download it and attach it to your robot. It is really free. Find it in the link below:
In order to follow this tutorial, we need to have ROS2 installed in our system, and ideally a ros2_ws (ROS2 Workspace). To make your life easier, we have already prepared a rosject for that: https://app.theconstructsim.com/l/5c13606c/.
Just by copying the rosject (clicking the link above), you will have a setup already prepared for you.
After the rosject has been successfully copied to your own area, you should see a Run button. Just click that button to launch the rosject (below you have a rosject example).
Combining Publisher, Subscriber & Service in ROS2 Single Node – Run rosject (example of the RUN button)
After pressing the Run button, you should have the rosject loaded. Now, let’s head to the next section to get some real practice.
Creating the required files
In order to interact with ROS2, we need a terminal.
Let’s open a terminal by clicking the Open a new terminal button.
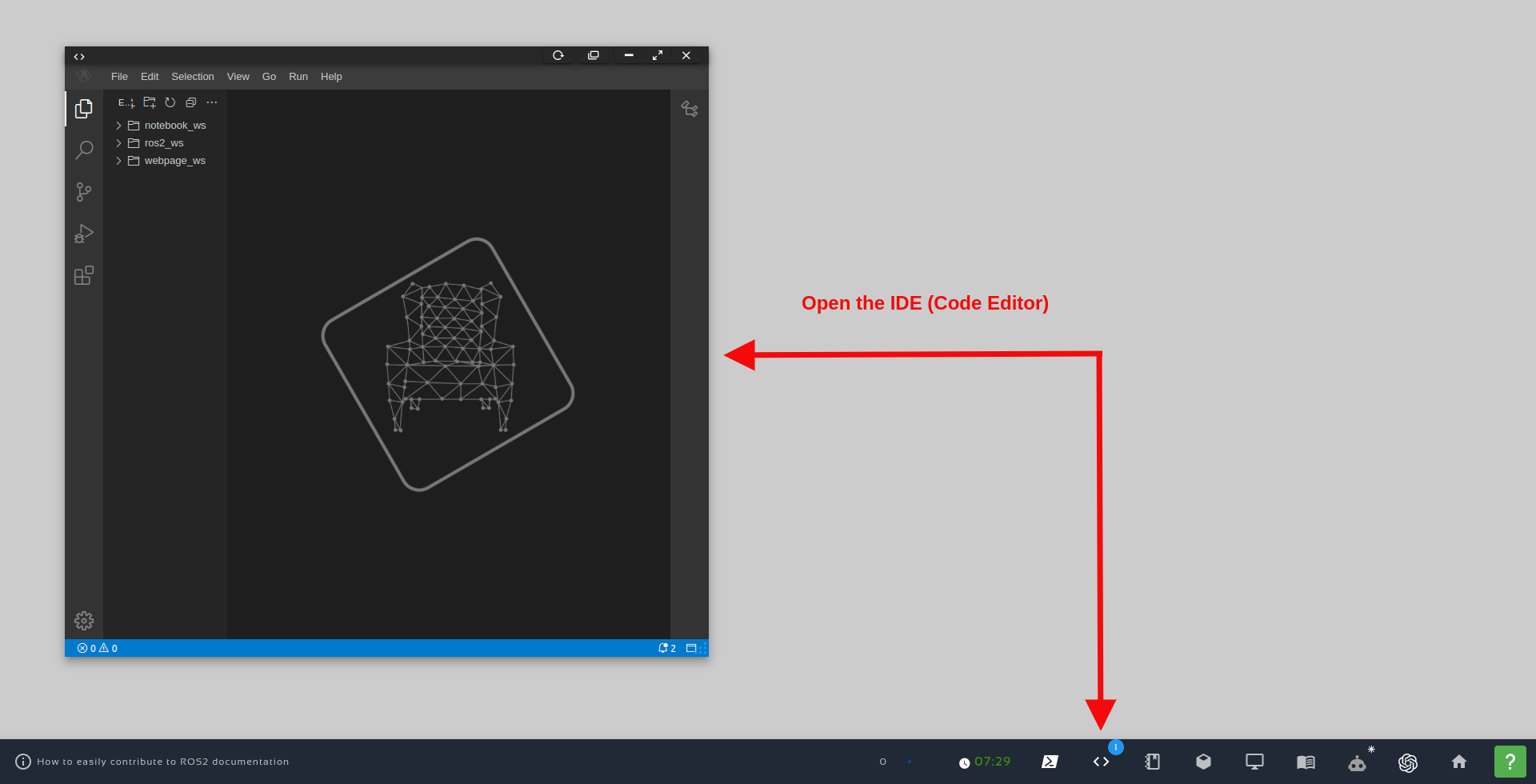
You could have created that file also using the Code Editor.
If you want to use the Code Editor, also known as IDE (Integrated Development Environment), you just have to open it as indicated in the image below:
Open the IDE – Code Editor
The following content was pasted to that file:
#! /usr/bin/env python3
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from custom_interfaces.srv import StringServiceMessage
import os
import cv2
from cv_bridge import CvBridge
import ament_index_python.packages as ament_index
class CombineNode(Node):
def __init__(self, dummy=True):
super().__init__('combine_node')
self._dummy= dummy
self.pkg_path = self.get_package_path("pub_sub_srv_ros2_pkg_example")
self.scripts_path = os.path.join(self.pkg_path,"scripts")
cascade_file_path = os.path.join(self.scripts_path,'haarbanana.xml')
self.banana_cascade = cv2.CascadeClassifier(cascade_file_path)
self.bridge = CvBridge()
self.publisher = self.create_publisher(Image, 'image_detected_fruit', 10)
self.subscription = self.create_subscription(
Image, '/box_bot_1/box_bot_1_camera/image_raw', self.image_callback, 10)
self.string_service = self.create_service(
StringServiceMessage, 'detect_fruit_service', self.string_service_callback)
self.get_logger().info(f'READY CombineNode')
def get_package_path(self, package_name):
try:
package_share_directory = ament_index.get_package_share_directory(package_name)
return package_share_directory
except Exception as e:
print(f"Error: {e}")
return None
def image_callback(self, msg):
self.get_logger().info('Received an image.')
self.current_image = msg
def string_service_callback(self, request, response):
# Handle the string service request
self.get_logger().info(f'Received string service request: {request.detect}')
if request.detect == "apple":
if self._dummy:
# Generate and publish an image related to apple detections
apple_image = self.generate_apple_detection_image()
self.publish_image(apple_image)
else:
self.detect_and_publish_apple()
elif request.detect == "banana":
if self._dummy:
# Generate and publish an image related to banana detections
banana_image = self.generate_banana_detection_image()
self.publish_image(banana_image)
else:
self.detect_and_publish_banana()
else:
# If no specific request
unknown_image = self.generate_unknown_detection_image()
self.publish_image(unknown_image)
# Respond with success and a message
response.success = True
response.message = f'Received and processed: {request.detect}'
return response
def generate_unknown_detection_image(self):
self.apple_img_path = os.path.join(self.scripts_path,'unknown.png')
self.get_logger().warning("Unknown path="+str(self.apple_img_path))
# Replace this with your actual image processing logic
# In this example, we create a simple red circle on a black image
image = cv2.imread(self.apple_img_path) # Replace with your image path
if image is None:
self.get_logger().error("Failed to load the unknown image.")
else:
self.get_logger().warning("SUCCESS to load the unknown image.")
return self.bridge.cv2_to_imgmsg(image, encoding="bgr8")
def generate_apple_detection_image(self):
self.apple_img_path = os.path.join(self.scripts_path,'apple.png')
self.get_logger().warning("Apple path="+str(self.apple_img_path))
# Replace this with your actual image processing logic
# In this example, we create a simple red circle on a black image
image = cv2.imread(self.apple_img_path) # Replace with your image path
if image is None:
self.get_logger().error("Failed to load the apple image.")
else:
self.get_logger().warning("SUCCESS to load the apple image.")
return self.bridge.cv2_to_imgmsg(image, encoding="bgr8")
def generate_banana_detection_image(self):
self.banana_img_path = os.path.join(self.scripts_path,'banana.png')
self.get_logger().warning("Banana path="+str(self.banana_img_path))
# Replace this with your actual image processing logic
# In this example, we create a simple yellow circle on a black image
image = cv2.imread(self.banana_img_path) # Replace with your image path
if image is None:
self.get_logger().error("Failed to load the banana image.")
else:
self.get_logger().warning("SUCCESS to load the banana image.")
return self.bridge.cv2_to_imgmsg(image, encoding="bgr8")
def publish_image(self, image_msg):
if image_msg is not None:
self.publisher.publish(image_msg)
def detect_and_publish_apple(self):
if self.current_image is not None:
frame = self.bridge.imgmsg_to_cv2(self.current_image, desired_encoding="bgr8")
# Your apple detection code here (from approach_2.py)
# HIGH=====
# (0.0, 238.935, 255.0)
# LOW=====
# (1.8, 255.0, 66.045)
low_apple_raw = (0.0, 80.0, 80.0)
high_apple_raw = (20.0, 255.0, 255.0)
image_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(image_hsv, low_apple_raw, high_apple_raw)
cnts, _ = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)
c_num = 0
radius = 10
for i, c in enumerate(cnts):
((x, y), r) = cv2.minEnclosingCircle(c)
if r > radius:
print("OK="+str(r))
c_num += 1
cv2.circle(frame, (int(x), int(y)), int(r), (0, 255, 0), 2)
cv2.putText(frame, "#{}".format(c_num), (int(x) - 10, int(y)),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 0, 0), 2)
else:
print(r)
# Publish the detected image as a ROS 2 Image message
image_msg = self.bridge.cv2_to_imgmsg(frame, encoding="bgr8")
self.publish_image(image_msg)
else:
self.get_logger().error("Image NOT found")
def detect_and_publish_banana(self):
self.get_logger().warning("detect_and_publish_banana Start")
if self.current_image is not None:
self.get_logger().warning("Image found")
frame = self.bridge.imgmsg_to_cv2(self.current_image, desired_encoding="bgr8")
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
bananas = self.banana_cascade.detectMultiScale(
gray, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30), flags=cv2.CASCADE_SCALE_IMAGE)
for (x, y, w, h) in bananas:
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 3)
cv2.putText(frame, 'Banana', (x-10, y-10),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0))
# Publish the detected image as a ROS 2 Image message
self.get_logger().warning("BananaDetection Image Publishing...")
image_msg = self.bridge.cv2_to_imgmsg(frame, encoding="bgr8")
self.publish_image(image_msg)
self.get_logger().warning("BananaDetection Image Publishing...DONE")
else:
self.get_logger().error("Image NOT found")
def main(args=None):
rclpy.init(args=args)
node = CombineNode(dummy=False)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
After creating that Python file, we also modified the CMakeLists.txt file of the pub_sub_srv_ros2_pkg_example package:
We basically added ‘scripts/pubsubserv_example.py‘ to the list of files to be installed when we build our ros2 workspace.
In the end, the content of ~/ros2_ws/src/fruit_detector/pub_sub_srv_ros2_pkg_example/CMakeLists.txt is like this:
cmake_minimum_required(VERSION 3.8)
project(pub_sub_srv_ros2_pkg_example)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(std_srvs REQUIRED)
find_package(custom_interfaces REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
set(ament_cmake_copyright_FOUND TRUE)
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
# We add it to be able to use other modules of the scripts folder
install(DIRECTORY
scripts
rviz
DESTINATION share/${PROJECT_NAME}
)
install(PROGRAMS
scripts/example1_dummy.py
scripts/example1.py
scripts/example1_main.py
scripts/pubsubserv_example.py
DESTINATION lib/${PROJECT_NAME}
)
ament_package()
We then compiled specifically the pub_sub_srv_ros2_pkg_example package using the following command:
cd ~/ros2_ws/
source install/setup.bash
colcon build --packages-select pub_sub_srv_ros2_pkg_example
After the package is compiled, we could run that python script using the following command:
cd ~/ros2_ws
source install/setup.bash
ros2 run pub_sub_srv_ros2_pkg_example pubsubserv_example.py
After running that script you are not going to see any output because we are not printing anything.
But, let’s try to list the services in a second terminal by typing ros2 node list. If everything goes well, we should be able to see the combine_node node:
$ ros2 node list
/combine_node
Launching the simulation
So far we can’t see what our node is capable of.
Let’s launch a simulation so that we can understand our node better.
For that, let’s run the following command in a third terminal:
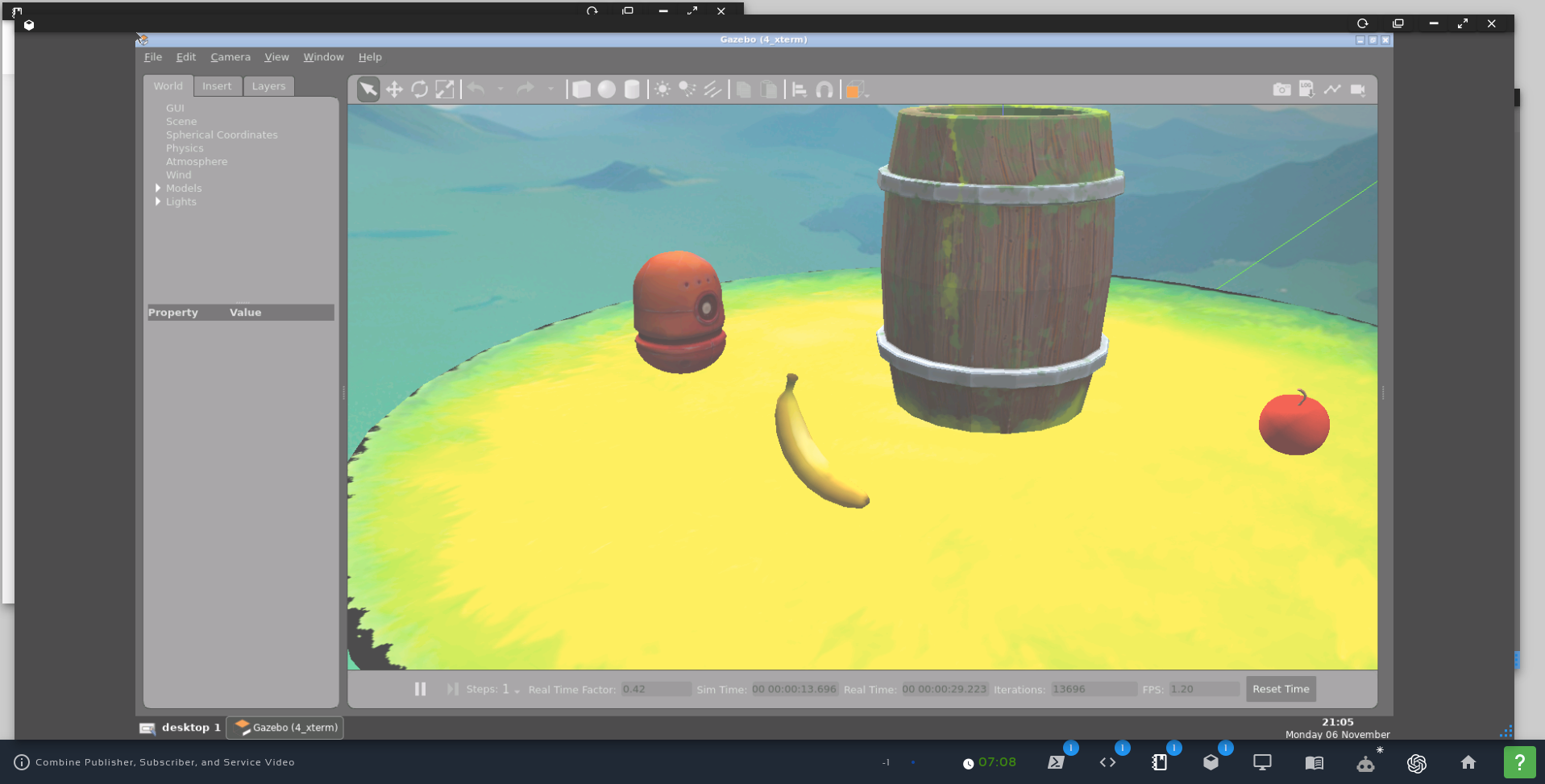
ros2 launch box_bot_gazebo garden_main.launch.xml
A simulation similar to the following should appear in a few seconds:
Combine Publisher, Subscriber & Service in ROS2 Single Node – Simulation
After launching the simulation, in the first terminal where we launched our node, we should start seeing messages like the following:
...
[INFO] [1699306370.709477898] [combine_node]: Received an image.
[INFO] [1699306373.374917545] [combine_node]: Received an image.
[INFO] [1699306376.390623360] [combine_node]: Received an image.
[INFO] [1699306379.277906884] [combine_node]: Received an image
...
We will soon understand what these messages mean.
See what the robot sees through rviz2
Now that the simulation is running, we can open rviz2 (ROS Visualization version 2).
To make it easier for you to see the robot model, and the robot camera, a fruit.rviz file was created at ~/ros2_ws/src/fruit_detector/pub_sub_srv_ros2_pkg_example/rviz/fruit.rviz.
You can tell rviz2 to load that config file using the following command:
A new screen should pop up in a few seconds, and you should be able to see what the robot camera sees, as well as the robot model.
The ROS2 Topic that we set for the camera was /box_bot_1/box_bot_1_camera/image_raw. You can find this topic if you list the topics in another terminal using ros2 topic list.
If you look at the topic that we subscribe to at the __init__ method of the CombineNode class, it is exactly this topic:
When a new Image message comes, the image_callback method is called. It essentially saves the image in an internal variable called current_image:
def image_callback(self, msg):
self.get_logger().info('Received an image.')
self.current_image = msg
At the __init__ method we also created a service for analyzing an image and detecting whether or not it contains a banana:
def __init__(self, dummy=True):
super().__init__('combine_node')
# ...
self.string_service = self.create_service(
StringServiceMessage, 'detect_fruit_service', self.string_service_callback)
def string_service_callback(self, request, response):
# Handle the string service request
self.get_logger().info(f'Received string service request: {request.detect}')
if request.detect == "apple":
if self._dummy:
# Generate and publish an image related to apple detections
apple_image = self.generate_apple_detection_image()
self.publish_image(apple_image)
else:
self.detect_and_publish_apple()
elif request.detect == "banana":
if self._dummy:
# Generate and publish an image related to banana detections
banana_image = self.generate_banana_detection_image()
self.publish_image(banana_image)
else:
self.detect_and_publish_banana()
else:
# If no specific request
unknown_image = self.generate_unknown_detection_image()
self.publish_image(unknown_image)
# Respond with success and a message
response.success = True
response.message = f'Received and processed: {request.detect}'
return response
By analyzing the code above, we see that when the detect_fruit_service service that we created is called, it calls the string_service_callback method that is responsible for detecting bananas and apples.
Now, going back to the messages we see in the first terminal:
...
[INFO] [1699306370.709477898] [combine_node]: Received an image.
[INFO] [1699306373.374917545] [combine_node]: Received an image.
[INFO] [1699306376.390623360] [combine_node]: Received an image.
[INFO] [1699306379.277906884] [combine_node]: Received an image
...
These messages basically say that we are correctly receiving the Image messages from the /box_bot_1/box_bot_1_camera/image_raw topic mentioned earlier.
If we list the services, we should find a service named . Let’s try it, by running the following command in a free terminal:
ros2 service list
You should see a huge number of services, and among them, you should be able to find the following one, that we created:
/detect_fruit_service
By the way, the reason why we have so many services is that the Gazebo simulator generates a lot of services, making it easier to interact with Gazebo using ROS2.
Now, let’s call that service. In order to detect an apple, a banana, and a strawberry, we could run the following commands respectively:
ros2 service call /detect_fruit_service custom_interfaces/srv/StringServiceMessage "detect: 'apple'"
ros2 service call /detect_fruit_service custom_interfaces/srv/StringServiceMessage "detect: 'banana'"
ros2 service call /detect_fruit_service custom_interfaces/srv/StringServiceMessage "detect: 'strawberry'"
Alright. After calling the service to detect a banana, we should have an output similar to the following:
requester: making request: custom_interfaces.srv.StringServiceMessage_Request(detect='banana')
response: custom_interfaces.srv.StringServiceMessage_Response(success=True, message='Received and processed: banana')
Indicating that the service correctly detected a banana.
If you check the logs in the first terminal where we launched our node, you will also see a message similar to the following:
BananaDetection Image Publishing...
So, as you can see, we have in the same ROS2 Node a Publisher, a Subscriber, and a Service.
Congratulations. Now you know how to combine different ROS2 pieces in a single node.
We hope this post was really helpful to you. If you want a live version of this post with more details, please check the video in the next section.
Youtube video
So this is the post for today. Remember that we have the live version of this post on YouTube. If you liked the content, please consider subscribing to our YouTube channel. We are publishing new content ~every day.
Keep pushing your ROS Learning.
Related Courses & Training
If you want to learn more about ROS and ROS2, we recommend the following courses: