Trong bài toán định vị (localization) ở robot, chúng ta cần sự trợ giúp từ các cảm biến như IMU, GPS, và Odometry. Bằng cách kết hợp các tín hiệu từ các cảm biến lại với nhau(sensor fusion) một lượng thông tin bổ ích sẽ giúp cho robot định vị được tọa độ chính xác trong các môi trường khác nhau. Trong project này, mình sẽ giới thiệu tới các bạn Robot Localization package một công cụ hữu ích để tích hợp sensor fusion cùng với turtlebot 3. Ở project này, mức độ đòi hỏi các bạn cần có một số kiến thức cơ bản như urdf, frames,… để có thể chỉnh sửa và thay đổi các file sẵn có. Hy vọng blog này sẽ mang lại cái nhìn tổng quan về chủ đề sensor fusion và localization ở robotics.
Khởi động rosject
The Construct đã tạo ra một công cụ rất hữu ích là rosject, nơi các bạn dễ dàng truy cập và khởi tạo các project cùng với ROS ở các phiên bản khác nhau:
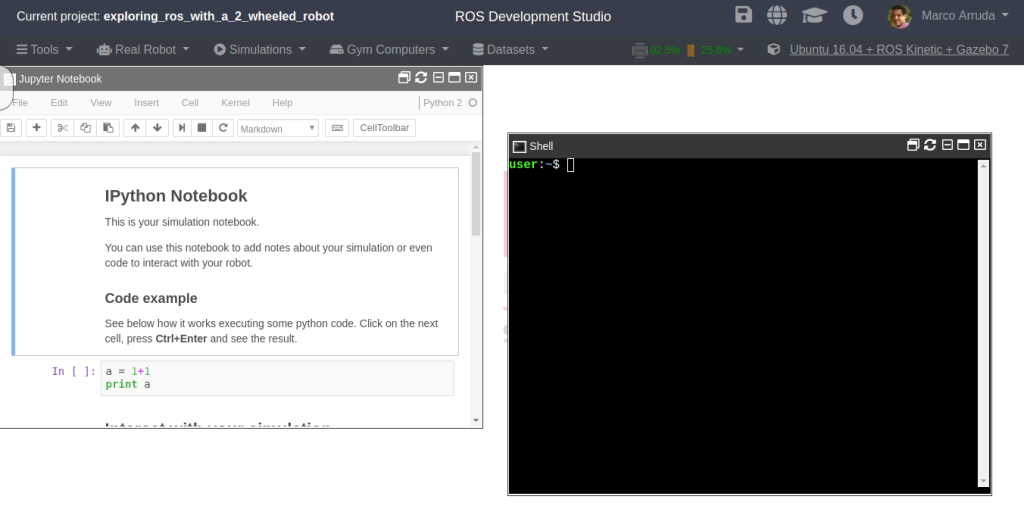
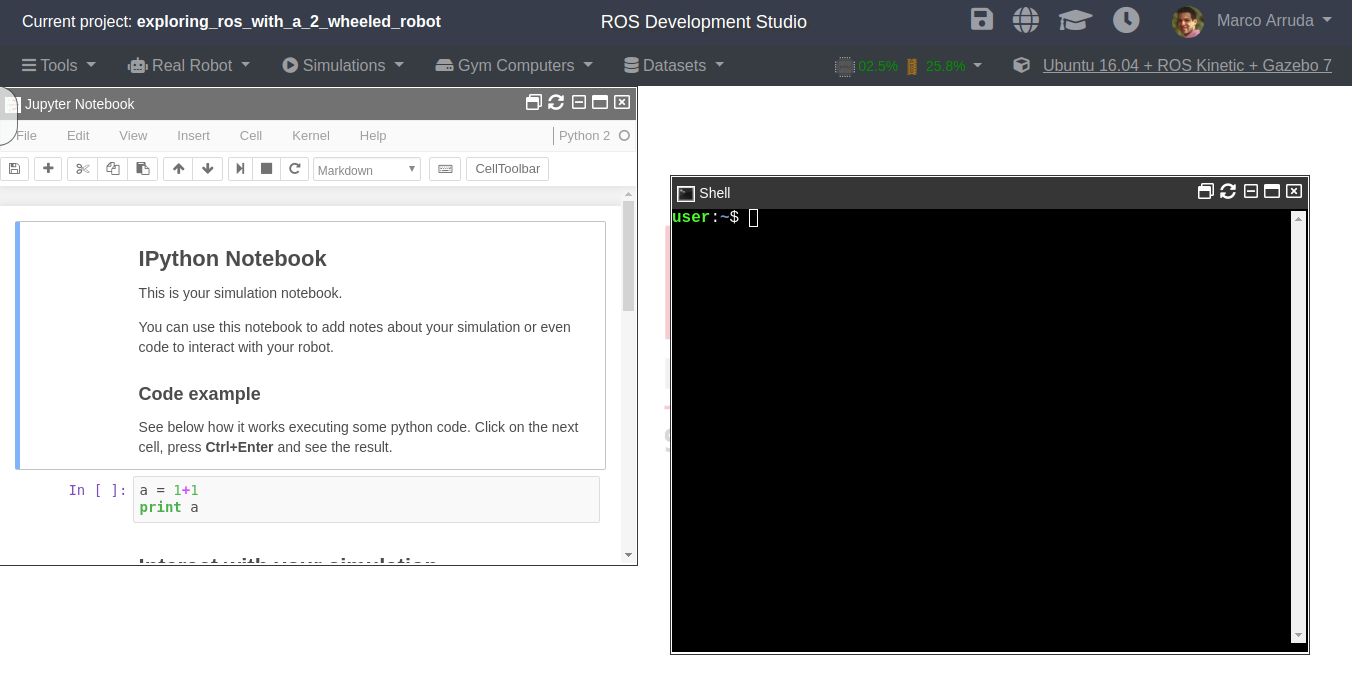
Như hình bên dưới là một rosject hoàn chỉnh, bạn chỉ việc nhấn vào nút RUN để khởi động rosject.
Sau khi nhấn vào nút RUN bạn sẽ thấy rosject được chạy trên màn hình. Ở đây, rosject cung cấp cho bạn cả terminal để có thể nhập các câu lệnh:
https://flic.kr/p/2pBd9pz
Bây giờ cùng nhau đến bước tiếp theo trong ví dụ này nhé.
Cài đặt các package cần thiết
Đầu tiên các bạn cần cài đặt các package cần thiết để có thể thực hiện project này, sau khi vào môi trường làm việc catkin là ros2_ws các bạn làm theo bằng cách thực hiện các câu lệnh sau đây:
Sau bước này thì các bạn sẽ cần một ít thời gian để có thể cài đặt thành công các gói cần thiết cho chương trình.
https://flic.kr/p/2pBfpkb
Tiếp theo sử dụng câu lệnh sau để build môi trường catkin
colcon build --symlink-install
https://flic.kr/p/2pBfpjV
Mình sẽ giải thích lý do tại sao các bạn lại phải sử dụng đường link github phía bên trên. Vì ở trong project này mình muốn tổng hợp và sử dụng những packages cần thiết và chỉnh sửa một số nội dung file nên mình đã gom thành một package lớn bao gồm các packages nhỏ để tiện cho việc chạy chương trình.
https://flic.kr/p/2pBe84i
Mô phỏng trên Gazebo cùng robot
Sau khi đã cài đặt đầy đủ các package cần thiết. Bước tiếp theo bạn cần chọn model robot cho project của bạn. mình sử dụng waffle trong project này:
source ~/ros2_ws/install/setup.bash
export TURTLEBOT3_MODEL=waffle
Sau đó để sử dụng môi trường gazebo và robot, bạn cần truy xuất môi trường gazebo và chạy ros launch package:
Cửa sổ Gazebo sẽ xuất hiện như trên cùng với robot waffle.
https://flic.kr/p/2pBe83G
Chạy Robot Localization package
Như bạn thấy môi trường và robot đã có, điểm quan trọng trong project lần này là biết cách áp dụng các cảm biến như IMU, Odometry, GPS,.. cùng với robot trong nhiệm vụ tổng hợp các tiến hiệu từ các cảm biến khác để giải quyết bài toán định vị cho robot. Ở cửa sổ thứ 2, các bạn thực hiện câu lệnh sau đây:
source ~/ros2_ws/install/setup.bash
ros2 launch robot_localization ekf.launch.py
https://flic.kr/p/2pBe83w
Tạo và mô phỏng robot cùng cảm biến trên Rviz
Sau khi đã có môi trường cho robot hoạt động là gazebo, có các cảm biến được tích hợp trên robot, nhiệm vụ là làm sao để có thể xác định và sử dụng các cảm biến để phục vụ cho bài toán định vị trên robot. Ở đây trên Rviz sẽ mô phỏng và cho thấy các trục tọa độ của từng thành phần được gắn vào robot. Trong các thư mục được cài đặt mình cũng đã chỉnh sửa phần mô phỏng để cho thấy sự thay đổi khi sử dụng gói Robot Localization:
Các bạn lưu ý là ở đây odom sẽ là frame chính của chúng ta, sau khi mô phỏng trên RViz thành công bây giờ các bjan có thể tận dụng các cảm biến đưuọc cài đặt sẵn trên robot và phục vụ cho project của các bạn như SLAM,…
Thêm một chút gợi ý nho nhỏ cho các bạn để kiểm tra rằng mình đã có các topic và frame được liên kết với nhau chưa. Đầu tiên mình sử dụng:ros2 topic list và kết quả xuất hiện các topic như GPS, IMU, Odometry.
https://flic.kr/p/2pB8KvY
Bên cạnh đó, ROS cung cấp câu lệnh để kiểm tra sự kết nối giữa các frame được khai báo: ros2 run tf2_tools view_frames.py
Sau đó file sẽ được lưu dưới dạng pdf và bạn chỉ việc mở lên để kiểm tra bằng câu lệnh sau:
evince frames.pdf
https://flic.kr/p/2pBfpiH
Để có được kết quả như trên, thì chủ yếu mình đã chỉnh sửa và thêm vào IMU và GPS tại urdf file. Các bạn có thể mở gói turtlebot3_description để chỉnh sửa tùy theo project của mình.
https://flic.kr/p/2pBeMA4
Hy vọng qua blog này các bạn đã có thêm một số kiến thức cũng như công cụ hỗ trợ cho các dự án liên quan tới robotics sử dụng ROS. Bên cạnh đó, các bạn có thể theo dõi các blog khác cũng như các khóa học liên quan trên The Construct nhé.
Explore the basics of robot modeling using the URDF
In this tutorial, we’re going to explore the basics of robot modeling using the Unified Robot Description Format (URDF). At the end of this tutorial, we will have a model ready and running in Gazebo simulator. Let’s start!
STEP 1
First of all, this project was created to help ROS beginners to understand the main tools ROS provides using a quite simple kind of robot. In order to do that, we are going to use ROSDS (ROS Development Studio). In this first part, we are going to create a robot model, visualize it in RViz and spawn it into a gazebo world.
Go to this page to start using it! Create a new ROSject and open it. That’s our development environment or ROSDS desktop:
STEP 2
Let’s start creating our package, inside of simulation_ws/src:
user:~$ cd ~/simulation_ws/src
user:~$ catkin_create_pkg m2wr_description urdf
The first we are gonna do it to create the robot description file. We are using a XACRO file. It’s a big file in this first moment, we will explain how to break it into different ones in the next posts, but for now let’s keep it like that. It’s shown only the beginning of the file. See the full content here.
STEP 3
Create a new folder urdf inside of ~/simulation_ws/src/m2wr_description and paste the robot description to a new file: ~/simulation_ws/src/m2wr_description/urdf/m2wr.xacro
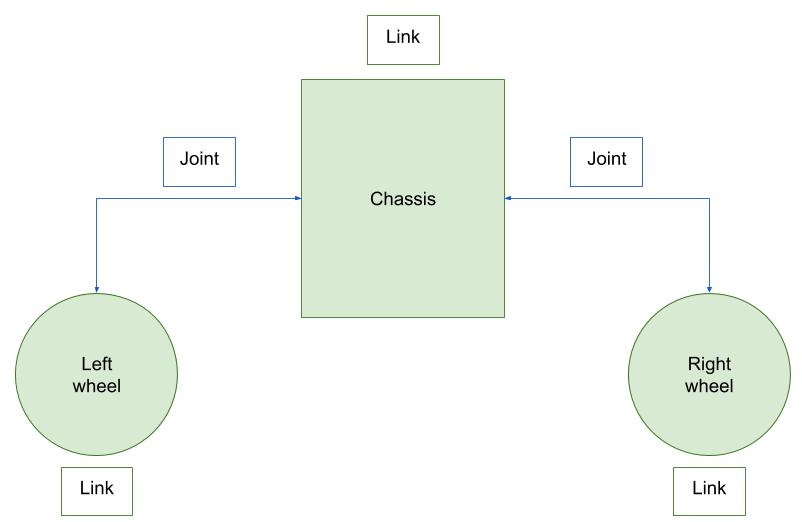
Basically, it’s a robot composed by 3 links and 2 joints. Every robot needs a base link, in this case, the chassis is in charge of connecting all the parts of the robot. See below an image that represents the relation between the links and joints. (Links in green, joints in blue).
STEP 4
We have our robot model defined. Let’s check it in RViz. In order to do that, let’s create a launch file and that opens RViz and fill its robot visualization with our fresh new model.
Create a new folder: ~/simulation_ws/src/m2wr_description/launch/rviz.launch
You can copy & paste the content below to the launch file we have just created:
Now, open a terminal or get back to the one you had opened before and compile the simulation_ws. (we actually don’t have anything to be compiled, but we need catkin to generate ROS header files, in order to have it into our $ROS_PACKAGE_PATH). After compiling it, launch the RViz visualization of the robot. You’ll execute something like:
user:~$ cd ~/simulation_ws
user:~/simulation_ws/$ catkin_make
user:~/simulation_ws/$ roslaunch m2wr_description rviz.launch
STEP 5
Now, let’s open the Graphical Tools application:
Great! We have a consistent robot model!
Now.. Let’s spawn it into a gazebo simulation. First, create a new launch file: ~/simulation_ws/src/m2wr_description/launch/spawn.launch
Stop the last launch file we started (for RViz), we are going to use the same terminal once again.
Start an empty simulation, from the simulations menu:
You should have the empty simulation ready:
STEP 6
Finally, spawn the robot to the Gazebo simulation. In your terminal, execute the following:
Check gazebo simulation again, the robot is there!
Done!
In case you have missed some part of the tutorial, you can have a copy of the ROSject we generated by writing this post: http://www.rosject.io/l/8e6c887/
In this next tutorial, we will explore the macros for URDF files using XACRO files.
[irp posts=”12948″ name=”Exploring ROS with a 2 Wheeled Robot #2 : XACROs”]
Don’t forget to leave a comment! Let us know what you think about this kind of post! We will be glad to have your opinion!
In this video, we are going to show how to create a launch file to spawn a URDF robot model in a given gazebo world.
Up to the end of the video, you will be able to spawn any robot model you may have described in URDF in Gazebo.
Step 1. Create a project in ROS Development Studio(ROSDS)
ROSDS helps you follow our tutorial in a fast pace without dealing without setting up an environment locally. If you haven’t had an account yet, you can create a free account here. Let’s create a new project and call it launch_urdf_model_in_gazebo.
Step 2. Create a package
Let’s create a ROS package for our code by using the following command.
cd ~/catkin_ws/src
catkin_create_pkg my_robot_urdf rospy
Then we create a m2wr.urdf file under the my_robot_urdf/urdf folder.
You can see that the launch file try to find the description file from the my_robot_urdf package.
Now we have to compile it with the following command
cd ~/catkin_ws
catkin_make
source devel/setup.bash
Now you can launch an empty world simulation from Simulations->Empty, then use the command roslaunch my_robot_urdf spawn_urdf.launch to spawn the robot!
If you are interested in this topic and want to learn more about URDF, please check our Robot Creation with URDF course.
In this video we are going to set a .STL mesh file to one of the links of our robot using its URDF code. From the URDF model used in the previous videos, we are going to define a new XML MACRO to use mesh files for a given link. Up to the end of the video, we will be able to see the mesh in RViz and Gazebo simulator.
Please make sure the meshscale is correct for your .stl file. In the simulation, the scale is in m. We change the meshscale to 0.001 because the stl file is done on the scale of mm.
Step 2. Modify the launch file
Since we only use one joint, we’ll only need the controller for one joint. Let’s change this part in the /launch/spawn.launch
![[ROS Q&A] 154 – How to Detect Collisions with static objects in Gazebo](https://www.theconstruct.ai/wp-content/uploads/2018/09/ROS-QA-154-How-to-Detect-Collisions-with-static-objects-in-Gazebo.png)
![[ROS Projects] – My Robotic Manipulator #6 – STL Mesh file for URDF Link](https://www.theconstruct.ai/wp-content/uploads/2018/07/ROS-Projects-My-Robotic-Manipulator-6-STL-Mesh-file-for-URDF-Link.png)