

This episode is dedicated to all those people that are designing the behaviour of their robots for the Robocup competition.
Today we are going to about evolving state machines from the original SMACH
But before going into that, let me remind you about our ROS online academy. Yes, at the Construct we have created an online academy named The Robot Ignite Academy which contains a ROS learning path for beginners. We start by teaching you Linux and Python for robotics, and we continue teaching you all the basic ROS concepts required to become a master of ROS. We conclude with a course that teaches you how to build your own robot and how to ROSify it, add ROS control to it so you can finally become a ROS Developer.
Now let’s talk with Brett Aldrich. Brett is the CEO of REEL ROBOTix, a company that is in the process of putting to the market some hardware for robots (secret yet!). However, within that company, Brett found the necessity to give a different approach to State Machines inside ROS. For that he developed SMACC. Today, Brett is going to explain us what is all about this SMACC and how we can use it for our robotics projects.
Welcome to the podcast Brett!

Related links:
- Follow Brett Aldrich on LinkedIn
- Reel Robotix, Brett’s company
- SMACC Repo
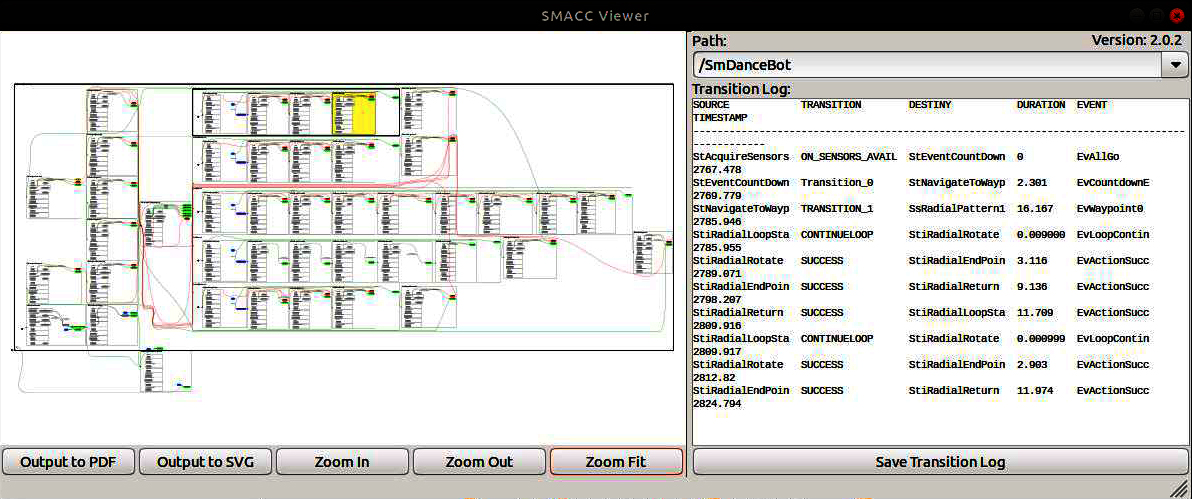
- The SMACC Viewer
- The SMACC Rviz pluguin
- Boost Statechart
- Boost MSM
- Boost MPL
- Podcast interview to Davide Faconti about Behavior Trees
Subscribe to the podcast using any of the following methods
- ROS Developers Podcast on iTunes
- ROS Developers Podcast on Stitcher
Or listen to it on Spotify:
- ROS Developers Podcast on Spotify
Podcast: Play in new window | Download | Embed
SUBSCRIBE NOW: RSS





0 Comments