

In case you are thinking about buying some robots for your class on robotics, here you are going to find a list of some of the most interesting ones, based on my own experience as teacher of robotics at University of LaSalle Barcelona.
The list contains a series of robots that you as a teacher can consider buying for making your students practice with real robots using ROS.
Disclaimer
We received no money, commission or any type of compensation for showing the robots of the list. It just expresses my personal opinion.
Criteria
- They must be robots that run with ROS, either off-the-shelf or because the manufacturer provides the drivers. I’m not taking into account robots that the manufacturer does not provide ROS drivers, even if somebody else has created the drivers. The reason is that usually, drivers created by third parties are not properly maintained, so you may end with a robot whose driver only runs in ROS C-Turtle.
- I have selected the robots that you can fully buy. I’m not including experiments that you may try based on a website with some list of materials. Basically, the criteria is that after bying, you will receive a box with the robot or pieces to build it.
- You must be able to use the robot for your own purpose. So I’m not including ROS robots that are part of a robotics solution (like warehouse handling, stock control, …).
If the robot does not comply with those criteria, we are discarding the robot from the list.
It may happen that your robot does meet the criteria and is not included in the list. Please let me know my errors in the comments section below, and I’ll be happy to update the post.
-
Do It Yourself Robots
- Those are robots that you buy online and receive all the pieces in a box, with the instructions ready to build. They are very small size (they fit on your desk) and are based on a basic sensor.
- List of robots:
- Linorobots, by Juan Jimeno: a series of build-yourself differential drive wheeled ROS robots with laser sensor created by Juan Jimeno. You can build several types of robots with them and learn about the basic concepts of robotics like robot kinematics, obstacle avoidance or robot navigation.

- Duckiebot, by the Duckietown Project: very simple ROS robots based on differential drive and camera to learn about visually based navigation. Those robots are part of the Duckietown project, a larger project that builds a complete city where those robots must learn to navigate around, taking into account traffic signals, and other robots around.
- JetBot CUDA robot: this is a small wheeled robot based on a Nvidia Jetson Nano card. This makes the robot an interesting option if you want to use deep learning with your robot since the card is equipped with CUDA cores.
- Linorobots, by Juan Jimeno: a series of build-yourself differential drive wheeled ROS robots with laser sensor created by Juan Jimeno. You can build several types of robots with them and learn about the basic concepts of robotics like robot kinematics, obstacle avoidance or robot navigation.
-
Small Wheeled Robots
- Those are robots of small-medium size that have wheels to move around. They are best suited for learning or teaching.
- List of robots:
- Turtlebot 2: this the most famous robot in the ROS world. Almost everyone learning ROS has used this robot for testing. It is a midsize robot with a differential drive, bumpers and a point cloud device. This robot allows practicing robot navigation. It is a good tool for teaching robotics navigation and kinematics.
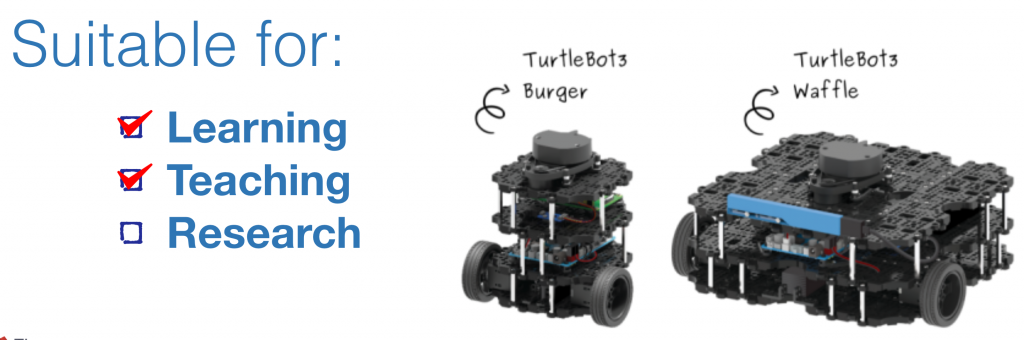
- Turtlebot 3, by Robotis: the next generation of Turtlebot, in a smaller size and in two different configurations and includes a 360º laser. This robot is small enough to fit on your desktop. They include multiple wholes in their structure so you can add your own structures on top. This is one of the few robots that works with ROS2.
- ROSbot by Husarion: the ROSbot is a very compact robot including several sensors: lidar, point cloud device and infrared sensors. Very good for learning and teaching. This robot also works with ROS2.
- Turtlebot 2: this the most famous robot in the ROS world. Almost everyone learning ROS has used this robot for testing. It is a midsize robot with a differential drive, bumpers and a point cloud device. This robot allows practicing robot navigation. It is a good tool for teaching robotics navigation and kinematics.
-
Robot Manipulators
- Those are robots arms that may or may not include a gripper. Robot manipulators are usually attached to a fixed platform, but can also be combined with a mobile platform to create a mobile manipulator. By the way, I refuse to call them cobots
- List of robots:
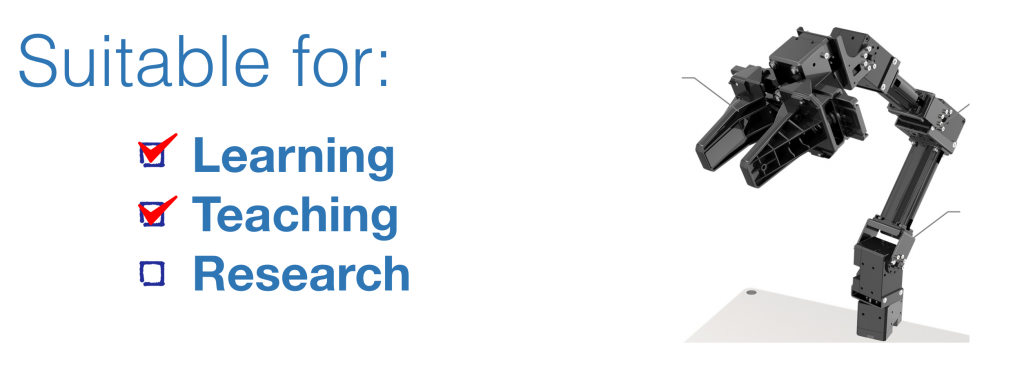
- Open Manipulator, by Robotis: it is an open source design of a robotic arm of small size that you can have on your desktop. The joints use dynamixel servos. Given the small size and open source spirit, it is very well indicated for learning and teaching. It has 4 DOF and a small gripper.
- CRANE-X7, by RT-NET: another 3D printed robotic arm, but of a bigger size than the Open Manipulator. It makes part of a larger set of educational material. It comes with a gripper.
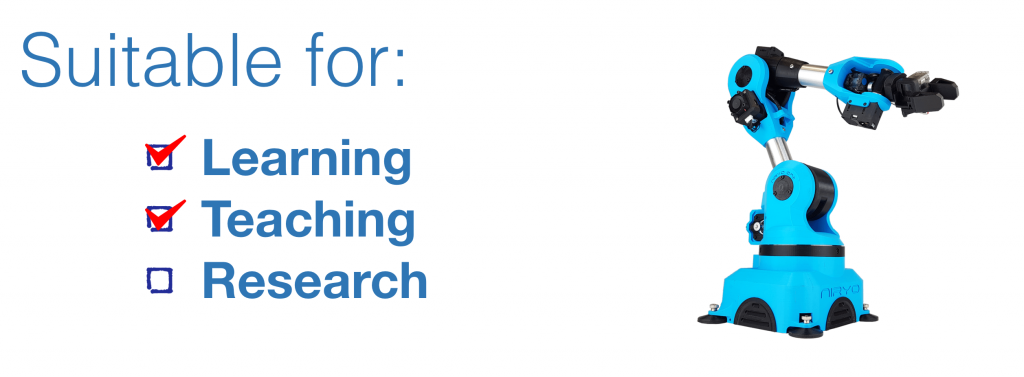
- Niryo One, by Niryo: small robotics arm that also fits in your desk. It is very compact and solid and it is specially made for education. It comes with a gripper.
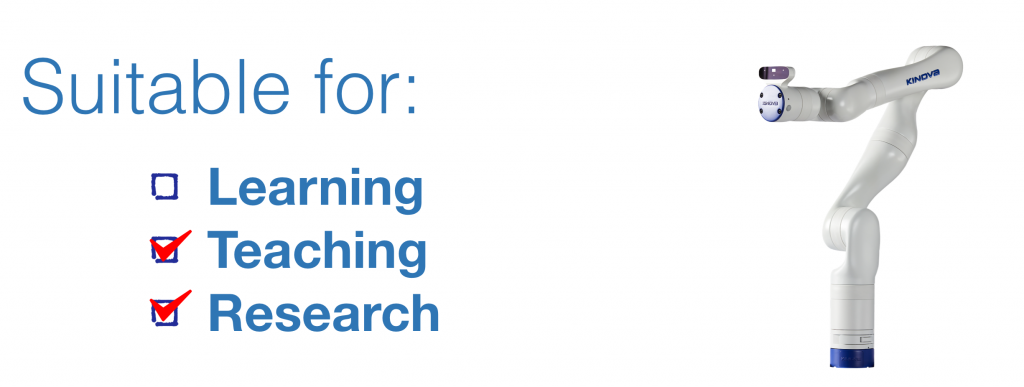
- Gen3, by Kinova: the latest robotic arm by Kinova with 6 DOF and a purpose for education and research. It doesn’t contain a gripper. In case you need it, you would have to integrate from another company. What is interesting is that it comes with an integrated Intel Realsense for vision and depth.
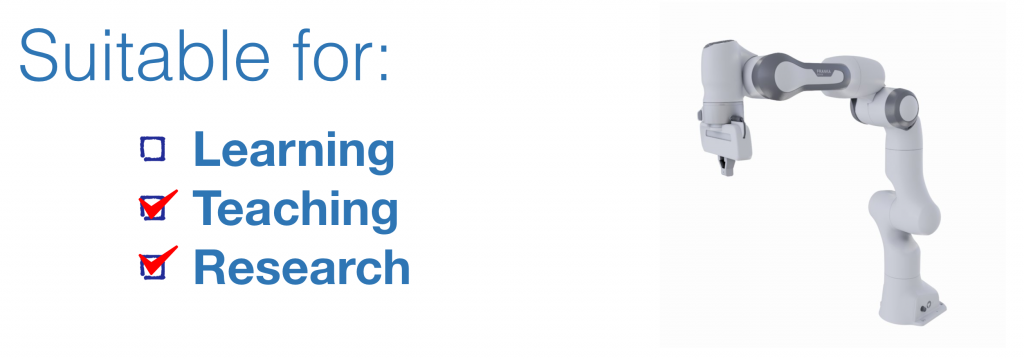
- Panda, by Franka Emika: a 7 DOF with included gripper ready for teaching or research. Actually, it is ready for industry applications too.
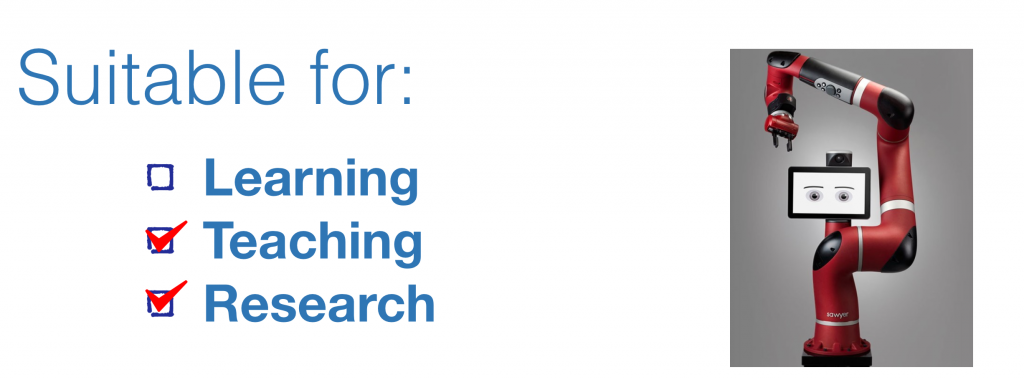
- Sawyer Black, by Rethink Robotics: after the close of Rethink Robotics, the company was bought by the Hahn Group and developed this new version of Sawyer. This updated version of Baxter has 7 DOF, a gripper and cameras in its grip.
- Open Manipulator, by Robotis: it is an open source design of a robotic arm of small size that you can have on your desktop. The joints use dynamixel servos. Given the small size and open source spirit, it is very well indicated for learning and teaching. It has 4 DOF and a small gripper.





-
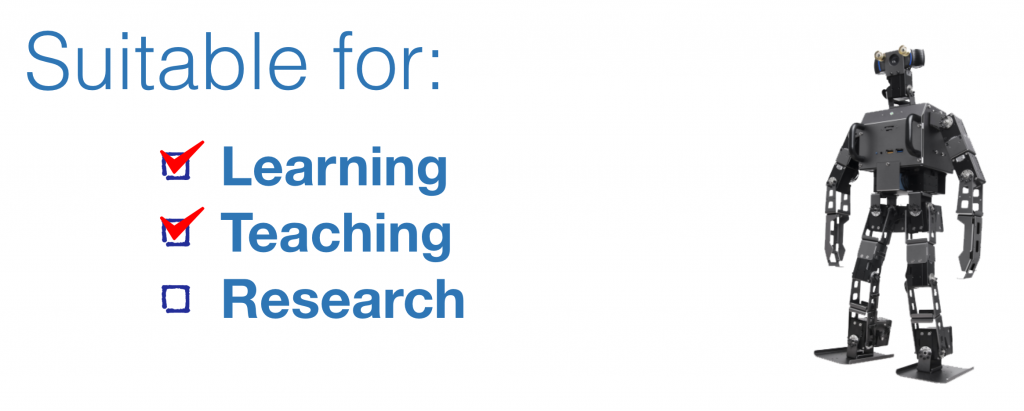
Legged Humanoids
- Robotis-OP3, by Robotis: small one that fits on your desktop
- Robotis-OP3, by Robotis: small one that fits on your desktop
Other educational materials mentioned on the podcast
- The online course about Mobile Robot Kinematics
- The online course about Machine Learning for Robotics
- Full list of ROS courses online
Subscribe to the podcast using any of the following methods
- ROS Developers Podcast on iTunes
- ROS Developers Podcast on Stitcher
Or listen to it on Spotify:
- ROS Developers Podcast on Spotify
For teachers
A Full ROS & Robotics Teaching Solution
Trusted by hundreds of universities

Podcast: Play in new window | Download | Embed
SUBSCRIBE NOW: RSS





Do you know the approximate cost for the Linorobot? Or the others?
By the way, check out the GoPiGo3 robot. It’s another candidate.
Sorry Pito, you will have to go to each page to get the quotation for the robots. Most of the pages links in the post provide the prices.
About the GoPiGo3 robot, looks very interesting and cheap. Do you know if it can be used with ROS off-the-shelf?
Hi Ricardo,
thank you for the overview of some available robots.
I personally bought a TurtleBot3. The reasoning was to get a ROS2 capable bot. But the thing turned out to be not as promised. In fact, I’m back at ROS1, since there are lots of bugs and an awful file corruption problem with ROS2 and Ubuntu on RPI3. That said, other problems were old Ubuntu installations necessary (the host is Ubuntu 16.04 for ROS1, Ubuntu 18.04 for ROS2, both use ROS Kinetic). My advice therefore is: Before you buy any of those ROS bots, check if they are actively maintained and use a recent OS as ROS_Host and ROS_Master), otherwise you find yourself working for hours to fix or isolate problems. This is true for updating the OS too, thinks break easily. By the way: Most books on ROS also use an old version of ROS.
By the way: You advertise TheConstructSim for learning robotics. Do they use the latest ROS Foxy Fitzroy and Ubuntu 20.04? As I learned the hard way, all is dependend on the OS (PC or embedded system), the ROS version and finally the hardware support (OpenCR).
So, thank you so much for this episode, I always enjoy hearing you on ROS!
Maybe you can create a podcast on where to find solutions on problems integrating ROS.
Just as an addendum: I wanted to buy a 3D Camera which I could use for for SLAM. I searched and found the Orbbec3D. But only ROS1 is supported. This make development really difficult.
Your advice is very sound and I do agree with it. If you want to get into ROS2 you must want to dedicate a lot of time to test and do work yourself before anything works. ROS1 is a lot more stable and quick to make the robot do things.
At The Construct we provide ROS Kinetic, Melodic and ROS2 Dashing and Eloquent. Still in the process to add Foxy.
Thanks a lot for your kind comments. My pleasure to hear the podcast are useful. Your suggestion for finding solutions is good, however difficult to do in a podcast because we would need some visuals. We have, though in our Youtube channel a long series of videos entitled ROS Q&A where we actually show that. The videos take a question from the official ROS Answers forum, and answers (shows) how to solve it.